基于异常电磁信号的无源定位精度分析
2017-10-24 09:01邵炜剑
电子与封装 2017年10期
邵炜剑,陈 伟
(中国电子科技集团公司第五十八研究所,江苏无锡214072)
基于异常电磁信号的无源定位精度分析
邵炜剑,陈 伟
(中国电子科技集团公司第五十八研究所,江苏无锡214072)
电磁环境状况直接影响社会生活的质量及人体健康。为了能够准确获取异常电磁信号的位置,经过分析我国电磁环境监测的发展现状,提出一种利用三基线干涉仪相位差变化率来实现对异常电磁信号定位的新方法,并对该方法进行精度分析。结果表明,在允许误差范围下,该方法具有良好的定位精度。
电磁环境;异常电磁信号;定位;相位差;精度分析
1 引言
随着电子通信行业的快速发展,各种电气和通讯设备急剧增加,大量电视塔、广播站、雷达、卫星通信、微波等伴有电磁辐射的设备越来越多,导致电磁环境状况越来越复杂[1]。所谓的电磁环境是存在于给定场所所有电磁现象的总和,包括自然和人为的,有源和无源的,静态和动态的,由不同频率的电场和磁场组成[2]。当环境中电磁场强度超过一定限值时,就会成为一个重要的环境污染要素,对公众身体健康造成潜在或长期的影响,也对家用电器、医疗设备、军用设施等产生一定的干扰[3]。因此,电磁波既是有益于社会发展的信息载体和能量流载体,又是潜在的环境污染要素,其危害效应已受到国家环保领域的高度重视[4]。基于此,既要把电磁能作为一种资源,充分加以利用;又要加强管理,将一些非法设台、擅自增大功率及互调干扰等情况所发射的异常信号进行定位排查。
我国对电磁环境方面的研究起步较晚。随着我国高科技产业和经济的迅速发展,电磁环境监测方面的任务也越来越重。因此,一批电磁环境实验测试中心相继建立。但是,目前我国对电磁环境方面的研究大多停留在某一实际干扰问题的防护水平上,比较成熟的电磁环境分析和预测软件目前刚刚起步[4]。由于我国电磁环境近场测量设备的研制工作开展得也比较晚,目前国产的近场测量仪器及设备存在屏蔽性能差、灵敏度低、频带范围窄、测量费工费时、精度差等问题,而且对于异常电磁信号的监测只能知道某个区域,并不能准确知道在哪个点。因此,异常电磁信号的精确定位是目前发展的必然趋势。
2 单站无源定位技术
根据以往设备可知,一般的电磁环境监测设备只能固定在某处测其当地区域的电磁环境,不能做到全方位的监测,故而测量时费工费时。因此,提出了对车载单站无源定位技术的研究[5],无源定位是指由一个或多个接收设备组成定位系统,测量被测辐射信号到达的方向和时间,利用相关技术和其他办法确定其位置的一种定位技术,其优点是只需要单个传感器和平台,设备量小,作用距离远,机动性好,并且能与地面系统协同使用[6]。因此,这种技术对于监测异常电磁信号区域的位置是非常可靠的。无源定位技术已经形成了多种成熟的方法,分别应用于不同的目的和场合,本文主要是通过三基线干涉仪相位差变化率的定位方法对异常电磁信号的精度进行分析,主要包括对测角误差、相位差、测距误差的分析。
2.1 测角误差分析
在测向系统中,辐射源的平面波由与天线视轴夹角为θ方向传播而来,干涉仪测向实质就是利用辐射信号在接收天线上形成的相位差来确定辐射源的方向。
设到达天线的信号相位差为:

其中,λ为入射信号波长,θ为信号入射角,Di为天线之间的距离。其测向原理如图1所示。
故只要测量出φi就能算出辐射源的到达方向角为:

将式(2)微分即得到测向误差Δθ为:

由式(3)可知,测向误差Δθ正比于信号波长λ和通道间相位差的测量误差Δφ,反比于基线长度D以及方位角的余弦值。因此,在相位差的测量误差Δφ一定的情况下,信号波长和方位角θ越大,测向误差Δθ越大,而增加基线长度D有利于降低测向误差。假设电磁信号频段是在6~12 GHz,为兼顾测向范围和测向精度,本方案采用四天线三基线阵,根据天线尺寸和天线座尺寸的要求[7,8],6~12 GHz天线阵基线长度如下:D1=0.04 m,D2=0.1 m,D3=0.19 m。
2.2 相位差分析
设载体运动平台上的两个天线阵元A、B接收到来波的相位差为 φ(t),则:

其中,ω0为来波角频率,Δt为来波到达A、B两个阵元的时间差,Di为两阵元之间的间距,c为光速,f0为来波频率,α0为来波方向角。假设Di远远小于载体运动平台与目标辐射源之间的距离。对式(4)求导可得:


载体单站无源定位方法中用到的相位差变化率及俯仰角、方位角等信息都是由相位差信息解算得到的,相位差由两个及两个以上天线阵元组成的相位干涉仪测量得到。而工程中,相位干涉仪只能得到(-π,π]rad范围内单值输出的相位差数据,所以当干涉仪基线长度超过来波波长的一半时,就有可能输出超过(-π,π]rad的相位差数据,即干涉仪测向会出现测向角度的不唯一性,从而产生相位模糊现象,进而影响定位精度。
2.3 测距误差分析
无源定位的突出特点是在不发射对目标照射的电磁波的条件下获取目标位置。利用空中运动平台上携载的干涉仪可以获得未知位置的辐射源辐射电磁波的相位差变化率信息,此信息包含有异常辐射源的位置信息。再利用测角系统测得的目标方位角和俯仰角及其时间变化率信息,即可实现对目标的实时定位。假定载体水平直线运动,飞行速度v=100 m/s,速度误差10 m/s,其示意图如图2所示。
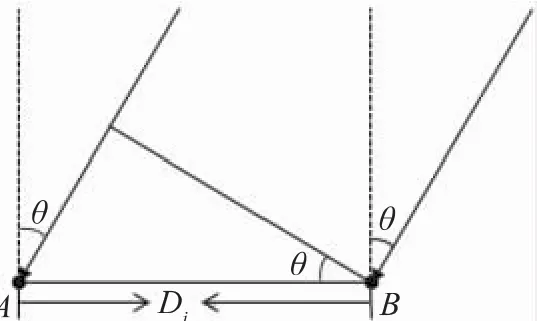
图1 干涉仪测向原理图
其中,载体的瞬时位置为(xR,yR,zR),对目标(xT,yT,zT)进行测向得到(α,β),其中 α 是方位角,为载体在目标辐射源所在水平面的投影到目标辐射源之间的连线 (方向为从载体投影到目标)与X轴正向的夹角,β是俯仰角,为载体到目标辐射源之间连线与载体所在XY平面的夹角。
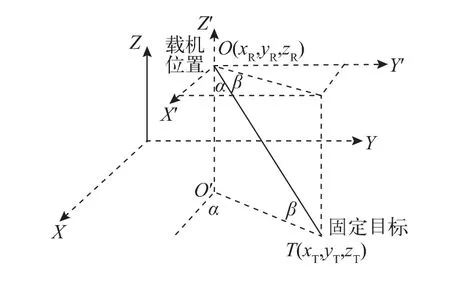
图2 目标与载体间的位置示意图
在二维条件下,由几何关系易得:

从式(7)可以看出,固定目标辐射源与干涉载体的距离 R 与 α(t)、φ˙(t)和 f0及载体的飞行速度 v相关,对式(7)两端取对数并求导可得:

由此可见,测距误差由速度误差、频率测量误差、俯仰角测量误差与相位差变化率测量误差组成。通常,干涉仪的频率测量误差可以保证在1 MHz以内,故对系统测距影响可忽略不计;速度误差测量精度可对载体系统的惯导设备提出要求;俯仰角测量误差与入射信号频率和入射角相关,入射信号频率越高,俯仰角测量误差越小;入射信号方向偏离基线法线的角度越大,俯仰角测量误差越小;相位差变化率测量误差越小,入射信号的信噪比越小,相位差变化率测量误差越大。
3 精度仿真计算
由上可知无源定位精度误差可分为测角误差、相位差、测距误差等。下面对各个误差的精度分析进行仿真。
3.1 测角误差精度仿真
为了进一步验证6~12 GHz的测角误差值,选取6 GHz、12 GHz的频率,从-45°~45°,步进量为 0.1°,测量误差Δφ在±18°之间变化,且取基线长度D3=0.19 m,所得到的仿真结果如图3、4所示。
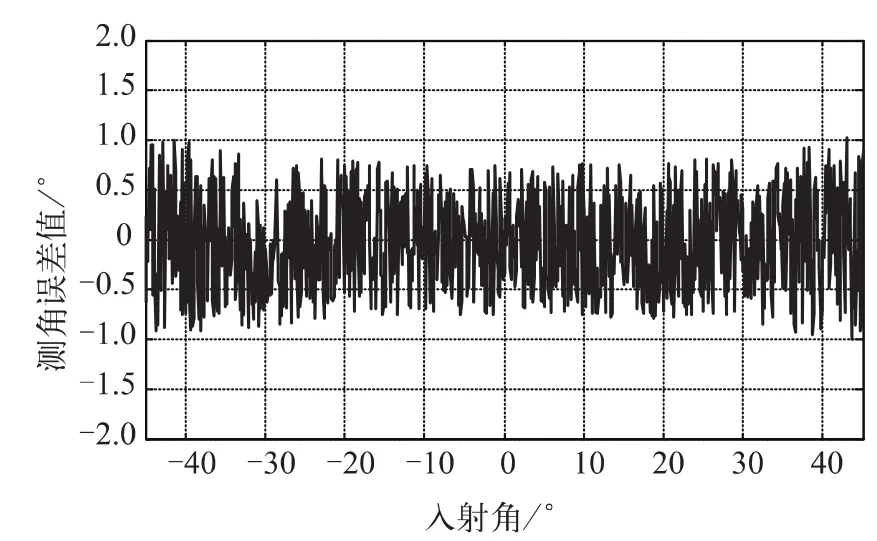
图3 6 GHz信号测角误差图
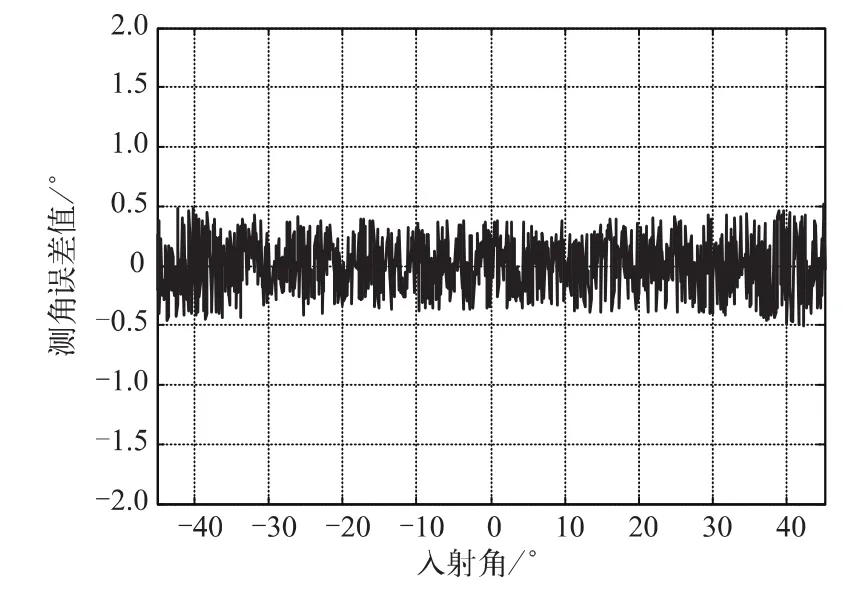
图4 12 GHz信号测角误差图
以上仿真实验表明,对于频段6~12 GHz,在误差允许的范围内,可对接收天线±45°范围内的辐射源信号进行精确测向。当基线长固定时,频率越大,测角精度越高,同理可以验证,cosθ越大,即方位角与干涉仪法线方向的夹角越小,测向精度越高,反之,测向精度越低,直至测向无效。当θ=90°时,即信号从干涉仪法线方向入射时,精度最高;当 θ=0°或 θ=180°时,即信号从平行于基线的方向入射时,精度最低。
3.2 相位差仿真
本方案中的模糊问题主要是指由基线引起的测向角度的不唯一性,长基线模糊性也称相位模糊性,这是由于相位测量的结果只能在(-π,π]rad之间。当相位出现模糊时,可通过算法得到(-π,π]rad范围内单值输出的相位差数据,当D1=0.04 m、D2=0.10 m、D3=0.19 m时,有不同频率及基线条件下的入射相位差,其仿真图如图5、6所示。

图5 6 GHz入射相位差图
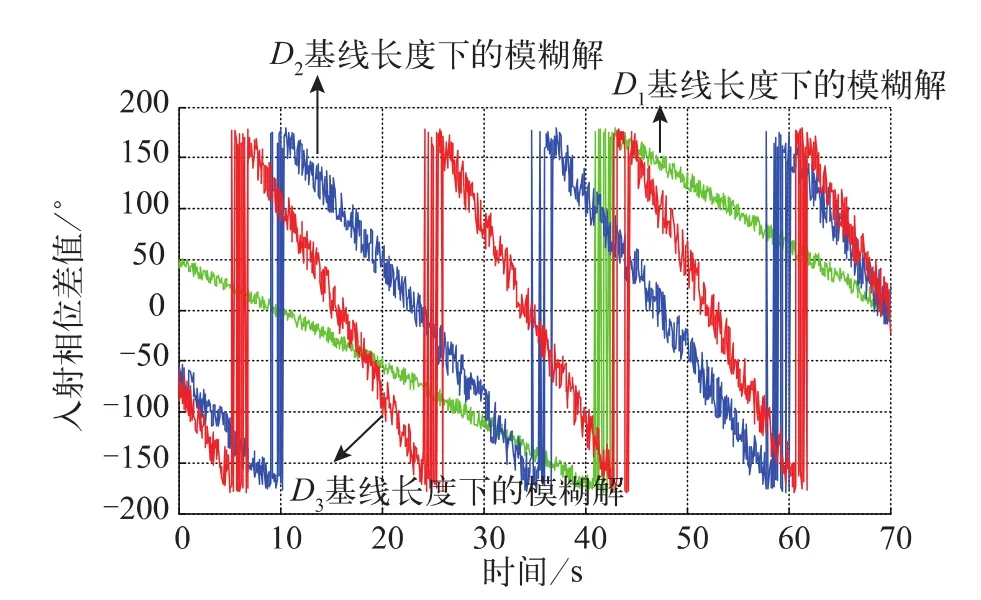
图6 12 GHz入射相位差图
图5、6中示出D1基线长度下的模糊解,D2基线长度下的模糊解和D3基线长度下的模糊解。在相同频率,基线长度越长,解模糊个数越多,且在相同的基线长度下,频率越高,解模糊个数越多。仿真结果表明,通过不同的相位解模糊算法均可以得到(-π,π]rad范围内单值输出的相位差数据。
3.3 测距误差仿真
根据测距误差分析,对6 GHz和12 GHz条件下的单次定位误差分别进行了仿真,其仿真结果如图7、8所示。
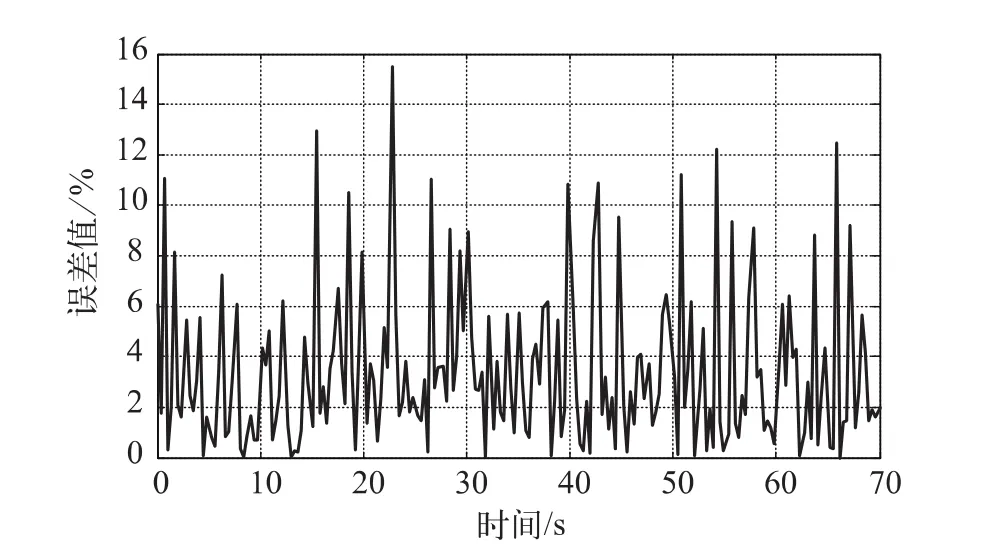
图7 6 GHz相位差变化率定位距离误差图
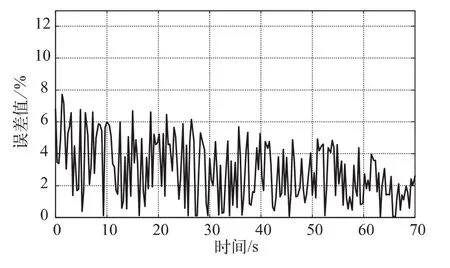
图8 12 GHz相位差变化率定位距离误差图
由仿真结果可以看出,定位误差可以满足一般定位精度的要求,单次定位的相对误差随频率的增大而减小,即频率越高,定位精度越高。
4 结论
迄今为止,电磁环境对人类影响的许多问题仍无定论,而随着无线电技术的快速发展,电磁环境问题变得越来越复杂,电磁环境监测技术的重要性也日渐凸现。因此,有关电磁环境监测方面的研究具有十分广阔的前景。本文采用载体单站无源定位技术来对受关注的区域进行定位监测,可快速、准确地掌握该区域内电磁环境的状况,有助于寻找异常电磁信号源并采取适当措施来保证该区域内的各种活动不受电磁干扰的影响。本文在特定频率条件下对定位精度进行分析,由于需要测量的频率范围很宽,可根据不同频率设计不同天线来覆盖整个频率,这样更能提高其定位精度,后续将对多维问题及超长带宽频率问题进行进一步研究。
[1]肖猛,易春.20Hz~40Hz电磁环境自动监测系统[J].环境技术,2010,(2):11-13.
[2]赵玉峰.环境电磁工程学[M].北京:化学工业出版社,1982.[3]徐鹏,张建春.电磁辐射污染对人的危害与防护[J].中国个体防护装备,2001,(5):17-20.
[4]张建宏.电磁辐射污染与电磁环境监测[J].电力学报,2007,22(1):39-43.
[5]沈爱国,姜秋喜.无源定位精度分析[J].舰船电子对抗,2007,30(4):19-21.
[6]司文健,平殿发,苏峰,等.基于相位差变化率的车载无源定位研究[J].舰船电子工程,2010,(4):76-79.
[7]赵勇慧.提高相位干涉仪测向精度与改善测角范围的探讨[J].火控雷达技术,2002,31:34-37.
[8]马华山.一种三基线相位干涉仪测向天线阵设计与测向算法的工程实现[J].电信技术研究,2011,(1):28-33.
Accuracy Analysis of Passive Location Based on Abnormal Electromagnetic Signals
SHAO Weijian,CHEN Wei
(China Electronics Technology Group Corporation No.58 Research Institute,Wuxi214072,China)
The electromagnetic environment conditions directly influences the quality of social life and human health.In order to accurately obtain the location of the abnormal electromagnetic signal,the status of electromagnetic environment monitoring system is analyzed and a new method using three baseline interferometer phase rate-of-changing information to find abnormal electromagnetic signal localization is proposed.The result shows that the method has good localization accuracy within permissible errorrange.
electromagnetic environment;abnormal electromagnetic signal;location;phase;precision analysis

TN911
A
1681-1070(2017)10-0045-04
2017-6-20
邵炜剑(1988—),男,江苏靖江人,硕士研究生,现就职于中国电子科技集团公司第五十八研究所,主要从事板卡设计工作。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
应用数学(2020年2期)2020-06-24
计测技术(2020年6期)2020-06-09
电子制作(2019年12期)2019-07-16
航天电子对抗(2019年4期)2019-06-02
北京航空航天大学学报(2017年6期)2017-11-23
制导与引信(2017年3期)2017-11-02
互联网天地(2016年2期)2016-05-04
探测与控制学报(2015年4期)2015-12-15