输电线路UAV清障飞行机器人的深入研发
2017-10-24 08:46,,,
电气开关 2017年2期
,,,
(国网福建省电力有限公司漳州供电公司,福建 漳州 363000)
输电线路UAV清障飞行机器人的深入研发
蔡峰腾,陈锜,林火煅,陈杰
(国网福建省电力有限公司漳州供电公司,福建 漳州 363000)
目前,输电线路导线异物处理一般采用传统的人工清除方式,耗时又耗力。为了提高输电运维检修效率与质量,文章运用模块化搭载设计思路.结合输电线路多旋翼无人机技术进行深入研发,赋予飞行机器人电热切割与喷火清障功能,研究出一套适用于输电线路一线生产岗位的线路异物清障飞行机器人。通过生产实践,验证分析其可控性、灵活性和技术延伸潜力。
清障飞行机器人;模块化;电热切割;喷火装置
1 引言
高压架空输电线路是目前技术条件下最为经济实用的电能传输方式,为强大工业提供可靠能源。随着经济高度发展,新建输电线路日益增加,线路覆盖范围也不断扩大。与此同时,线路受到周遭环境影响发生的故障次数也随即增多;特别当大风、台风等天气条件下,福建省各地输电线路时常发生各类未绑扎牢固的漂浮异物(例如氢气球、遮阳网、广告布条等)缠挂导线的情况。风力作用下,异物出现摆动或下垂至地面的现象都有可能造成输电线路对地短路、相间短路等严重影响电力设备安全稳定运行,导致大规模停电的恶性事故。不能及时排除导线异物对电力系统的潜在危害,不仅降低了电力系统供电的可靠性,还极大程度地影响了地区的居民生活和企业发展。
输电线路异物故障常年发生,以往带电作业、电动清障机器人、机械清障刀等各有特点,但操作均需要上塔,且多人配合,耗费时间较长。以往该类故障大多采用停电检修处理方式,通过申请停电,组织人员讨论制定异物拆除方案,调派专业检修人员进行拆除工作等多个步骤来完成;整个停电检修的处理过程都面临着劳动强度高,人身安全隐患大,作业效率低下的难题,而输电专业飞行机器人(无人机UAV)的应用带来了解决这一难题的新途径。
2 国内外相关研究
2.1 国外相关研究
电力行业所面临的输电线路巡检工作难题艰巨,不过到目前为止,国内外同类或类似技术研究依然较少。
1984年,日本九州电力株式会社(KEPCP)和安川机器人公司开始合作研发一种应用于6.6kV高压线路带电维护作业的作业机器人Phase I。虽然Phase I的应用降低了生产作业中工人高坠或电击事故发生的概率,但由于它主要采用人工手动操作方式,作业效果并不稳定,工作效率也不高。后又研制出半自动作业机器人Phase II和全自动作业机器人Phase III[1]。
80年代,美国Palo Alto电力研究院研制出一台遥控操作带电作业机器人TOMCAT(Teleoperator for Operations,Maintenance,and Construction using Advanced Technology)[2]。
通过观察分析,这些机器人明显整体体积庞大,操作安全系数可控性不高,对于地势起伏复杂、环境多元的输电线路走廊,可操作性与局限性较大。

图1 由Kyushu Electric Power Co.开发的双臂带电维护作业机器人
2.2 国内相关研究
泉州电业局于2012年研制出了可代替电力作业人员进入带电的输电线路导、地线进行清障工作的等电位作业自动装置。该装置利用了八字形的异物收纳装置把散开的导物集中到刀口上来,利用高速电剪切割异物,以此进行清除[1]。
在这类线上清障机械装置的设计原理基础上,国内又进行了相应功能的革新或替换,如:太原供电公司采用液态瓦斯喷火功能,山东超高压公司、国网山东电力研究院增加了两个机械臂以抓取和割断异物。
这方面的研究关键点主要分为输电线路爬行烧除、电动剪刀、激光清除[3]、勾抓捕捉等。但由于机械主体笨重,工作时需要人工送至线路导、地线上进行安装,人员需要较高程度参与;其安全性与稳定性仅仅依靠导、地线本身,且行进过程中常遇到间隔棒、防振锤等障碍,使得异物的清除效率较低,安全性能不足。

图2 等电位作业自动装置
3 技术探究
技术研究攻关队伍基于丰富的无人机技术经验基础上,提出飞行机器人的模块化设计,为系统装置设计与拓展提供一种新的技术方案。清障功能的模块化使得其可被搭载的无人机型号限制大大降低。
攻关队伍通过对高空机电工具、高空切入漂浮物绳索运动动作、无人机共轴动力稳定性、喷火后坐力的控制、无人机配重比平衡等内容的研究,最终研制出具有电热切割和喷火清障功能的无人机可载工业模块;成功搭载于无人机UAV,实现快速、有效、灵活、方便的输电线路异物清障。
4 电热切割模块
4.1 设计原理
在无人机上搭载高空电热切割模块。清障时,首先控制无人机旋转或前行至指定位置,通过异物捕获机构将异物捕获并揽入捕获口中,同时通过控制遥控电切电路动作接通电源产生电流,电流到达电热丝,电热丝发热将异物熔融,使得异物逐渐自动落入V型切割区域中,直至将异物熔断。
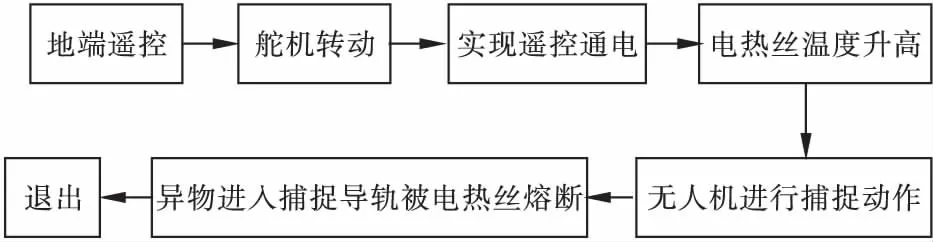
图3 电热切割装置功能原理设计图
4.2 结构设计
多旋翼可载电热切割装置功能结构设计思路如图4所示。
4.2.1 电热丝
电热丝切割机通过电热丝通电发热来熔断捕捉到的异物,完成切割清障功能。通电发热现象正是应用了物理上的焦耳定律。在实际应用中,不存在纯电阻电路的情况,根据演变公式:
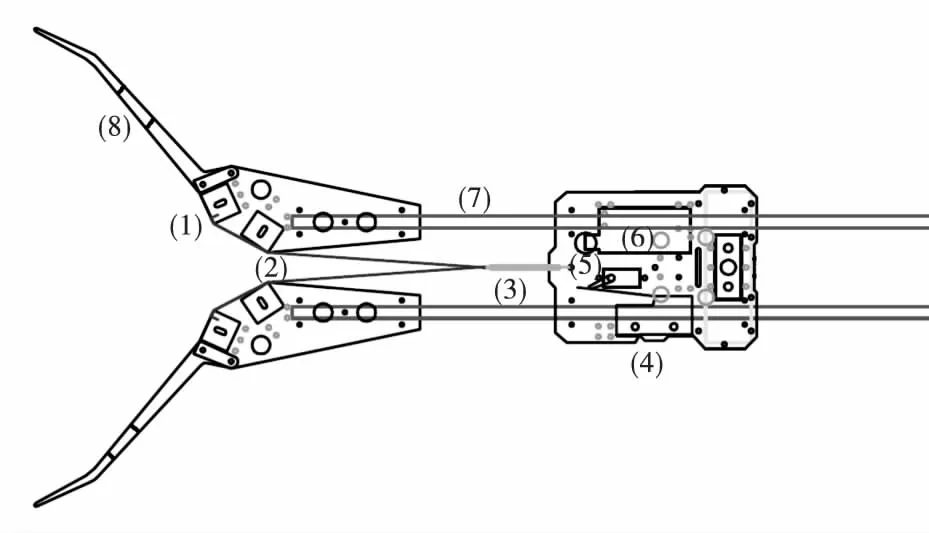
图4 电热切割装置模块CAD设计图

(1)
其中:m为质量;c为物质比热容;△t为温度变化。可知:
温度变化与电压有关,控制输出电压即可控制电热丝的温度。通过研究计算[5]进一步发现,电压越高,加热时间就会变得越短,从中可进行电热丝预热时间计算与效率优化。由于结构弹簧的存在,电热丝长度有效保持在20cm以内,即可选用12V供电电路。为了匹配无人机且减少零部件的搭载重量,将电热丝的供电电压定为12V,计算并测试得实际预热时间仅为2s,满足模块设计效率要求。
另外,由于采用无人机搭载平稳靠近异物的方式进行切割,没有高速切割的功能要求,则在设计中只选择常规的0.4mm镍铬合金电热丝,其在高温环镜中能保持较高强度、不带磁性、辐射率高且耐腐性能好,有较长使用寿命。
4.2.2 结构弹簧
结构弹簧(图4中(3)结构)连接着V字电热丝尖端与模块机身,有效控制了电热丝的长度,使之设计参数更为合理。
结构弹簧的设置,也源自于对高空清障运动过程中被切割物对切割机与无人机飞行X、Y、Z轴方向性影响的研究。它能有效提供缓冲,避免切割前端受力过猛而引起的无人机飞行失控或机身损伤;也确保发热的电热丝不与机身模块底板直接接触。
4.2.3 捕捉导轨
高空中进行异物清障经常遇到异物漂浮或悬挂的不稳定状态,如何在远距离、超视距的情况下更为精准地捕捉异物,是电热切割模块的另一大重点。
攻关队伍经过讨论与试验,确定了三段式捕捉导轨的设计方案。捕捉导轨由碳纤维板雕刻而成,与电热切割前端一体组装。导轨分为三段,从最内端向外分别为不完整的(130°)钝角V型、(95°)近直角V型和(50°)锐角V型接续而成;这样的设计有利于扩大异物导入的范围,提高导入机率,夹角能够保证异物不脱出捕捉导轨,顺利完成切割动作。

图5 捕捉导轨角度参数图
在捕捉导轨的设计中,攻关队伍还在导轨前中段加装了LED指示灯(图4(8)部位),以便于在光线条件差的阴天、夜晚确认高空中导轨的大体位置。
4.3 技术指标

表1 电热切割功能的清障飞行机器人相关技术指标
5 喷火装置模块
5.1 设计原理
采用Naii ChameleonX813工业模组化,由TW-MW03 12V万能脉冲点火器、点火针等结构组成成功将其与无人机相结合。清障时,喷油系统运用2BV型液环式真空泵通过前端1.2m输油通道将油从喷嘴喷出,经过防静电挡火罩前的脉冲点火器,喷出火焰,成功将异物燃烧。
5.2 结构设计
多旋翼可载喷火装置功能结构设计思路如图10所示。
5.2.1 喷嘴
采用15°~30°角度、长距离喷射的实心锥形类喷嘴,该喷嘴喷出的雾滴大,单位面积上冲击力高于大角度实心锥形喷雾的喷嘴。新颖、独特的旋转叶片设计和优良的整体喷流控制性能使得其喷雾效果特殊。

图6 喷火装置模块功能原理图

图7 喷火装置模块清障飞行机器人实物结构图

图8 喷嘴实物图
5.2.2 脉冲点火
脉冲电子技术的点火器是利用脉冲电子原理产生连续性瞬间脉冲高电压放电产生火花,从而点燃燃气具火焰的电子产品[7]。TW-MW03 12V万能脉冲点火器的输入不分正负极,可以接直流12V或者交流12V,安装简单方便;其点火性能强,可以在阴雨天,雪天,空气比较潮湿的沿海地区或者天气比较寒冷的北方地区正常点火;连续工作时间长,可以连续点火10min以上,不会损坏,可有效保证高空喷火清障的作业功能。
5.2.3 液环真空泵
2BV型液环式真空泵所具有的特点结构,决定了它们适用于各种较为苛刻、复杂的应用领域。它们可抽吸含有大量水汽、可疑汽的介质;也可抽吸含有微小固体颗粒、或有液体夹带吸入的气体;抽吸易燃、易爆或有有毒、有腐蚀性气体时不易发生危险。
其机泵同轴式的直接设计,节省空间,便于安装,可靠性高,维护简单;元件质量较轻,可减少了清障飞行机器人的整体负担。
5.2.4 油箱与卡扣
油箱容量可达1000mh,标有最大储量水平标线;采用柴/煤油为燃料,材料获取方便;油箱外体一侧呈沟槽设计,可直接与机身油箱固定装置对接固定,方便简洁。
5.3 技术指标

表2 喷火清障功能的清障飞行机器人相关技术指标
6 研发测试情况
技术攻关队伍对两种功能的清障飞行机器人成品进行现场飞行研发测试,包括续航测试、技术值测试、清障功能试验等内容。
(1)外观:整机外观整理,各个模块嵌入合理,导线不外露。
(2)操控性:现场操作简捷有效,包括无人机的操作和清障(电热切割和喷火)操作,无出现操作故障。
(3)有效控制半径:大于2000m。
(4)云台稳定性:采用专用3轴陀螺仪控制云台,收到的回传图像稳定无明显晃动。
(5)数码相机类型:挂载高清运动相机,摄像分辨率达到1080P,拍照达到11M像素。
(6)地面接收站:10寸高亮显示器内置5.8GHz4通道图像接收设备,方便携带,在野外作业强光照射下,屏幕画面能够辨识但是不够清晰。
(7)喷火距离:可达6~8m。
(8)挡火罩:防静电、防油、防燃功能优异。
(9)续航测试:30min。

图9 电热切割清障飞行机器人测试现场

图10 电热切割清障飞行机器人搭载相机视角

图11 喷火装置清障飞行机器人外观检测

图12 喷火装置清障飞行机器人功能测试
7 应用意义与效益分析
7.1 应用意义
目前,清障飞行机器人已成功应用在国网漳州供电公司220kV凤紫II路#193-#194塔、110kV龙澄线#25-#26、110kV伏园线等架空地线气球缠绕的消缺工作上;实现了输电线路不停电,省时、省力、快捷的消除导线异物隐患,克服了传统停电作业方式作业效率低下,不能及时排除异物对电力系统的潜在危害等问题。清障飞行机器人的研发应用可以为公司带来巨大的经济效益及其社会效益,更是提高了电力系统供电的可靠性。
7.2 效益分析
停电费用:该项技术的研制运用每年可为地区单位减少停电检修次数约16次,以每次220kV线路停电检修一次(天)损失电量15万kWh计,每年节约停电检修损失合计240万kWh,每kWh电量0.5元,该技术运用每年合计节约停电损失:120万元。
人员费用:常规停电作业动用10人次(操控清障飞行机器人只要2个人)、车辆减少损耗100元/次,年均作业次数16,按技工300元/日计算:
8×16×300+100×16=40000 共计124万元。
可知该项目深入研发的清障飞行机器人创造的经济效益尤为可观。
8 结束语
长期以来,处理悬挂在运行中的高压架空输电线路到线上的异物一直是长期困扰电力系统运行维护人员的技术难题。清障飞行机器人的应用,可避免进行复杂的线路停电申请,作业时间不受停电时间的限制,有效保证电网供电可靠性。同时,实际应用中不受导线异物位置的影响,不受作业故障点周围地形环境的影响,可长距离远程操作清障飞行机器人和地面控制系统相结合的方式进行异物清除处理。
应用实践证明其确实有效地缩短了工作时间且操作过程安全可控,非常值得在同行业中进行推广,具有提高输电线路巡检水平与效率的重大意义。模块化设计理念结合无人机技术,拥有极大的技术延伸潜力,技术攻关队伍可继续研发高速旋切、激光扫描、机械双臂等功能模块,赋予无人机(UAV)更多的可能性与实用性。
[1] 曹燕军.输电线路异物清除机器人机构设计与分析[D].沈阳:沈阳理工大学,2015.
[2] Lynne e.Parker,John v.Draper.Robotics Applications in Maintenance and Repair [J].Handbook of Industrial Robotics,1998,2nd edition.
[3] 周辉,杨颖锐,杨生兰.输电线路异物清除装置研究[J].科技创新与应用,2016(7):174 - 175.
[4] 刘俊畅,芦利斌,谭力宁.基于Arduino的遥控舵机技术的实现[J].信息技术,2015(5):195-198.
[5] 胡吉伟.电热丝切割机的开发与研究[D].上海:华东理工大学,2014.
[6] 马功琪.点火器技术的现状与发展趋势探析[J].科技促进发展,2012(s1):90-93.
ResearchonUAVEliminatingFaultFlyRobotofTransimmisionLines
CAIFeng-teng,CHENQi,LINHuo-duan,CHENJie
(Zhangzhou Power Supply Company,Fujian Electric Power Company,Zhangzhou 363000,China)
The paper uses the modular carried design thought to combine multi-rotorwuing unmanned plane technology of the transimmission lines to carry out study deeply,giving the function of the flying robot electric heating cut and flame fire eliminating fault.By practice,prove its contrdlability and sensitivity.
eliminating fault fly robot;modularization;electric heating cut;flame device
1004-289X(2017)02-0087-05
TM72
B
2016-12-24
猜你喜欢
建筑施工(2022年3期)2022-07-18
交通企业管理(2020年6期)2020-11-11
山西交通科技(2020年2期)2020-07-08
中学生数理化·中考版(2019年12期)2019-09-23
中学生数理化·中考版(2018年12期)2019-01-31
中国铸造装备与技术(2017年3期)2017-06-21
中国交通信息化(2017年5期)2017-06-06
中学生数理化·中考版(2017年12期)2017-04-18
物理通报(2012年9期)2012-01-23
体育研究与教育(2011年1期)2011-11-10