
基于机器人的温室大棚环境智能监控系统
2017-10-27 14:08刘艳昌孙华吴纪红
江苏农业科学 2017年16期
刘艳昌 孙华 吴纪红
摘要:针对温室大棚有线监控系统存在布线困难、劳动力成本高和无线监测点移动性差等问题,设计一种以机器人为移动监测点,以Kingview 655软件为上位机开发平台的温室大棚环境智能监控系统。该系统采用现场可编程门阵列((field-programmable gate array,简称FPGA)控制板作为采集控制终端,结合多路传感器实现对机器人的行走控制和各环境参数的实时采集、处理、显示、存储及监测报警等功能,并通过APC220无线模块将处理后的数据传给上位机,上位机根据用户设定参数范围值,通过APC220无线模块发送相关设备的启/停控制命令,实现环境参数的远程控制。同时,管理人员也可以借助通用分组无线服务(general packet radio service,簡称GPRS)模块和手机终端,实现查询环境参数和控制设备等功能。结果表明,该系统具有运行稳定、采集精度高、易于控制、成本低廉等优点,能满足温室大棚监控的智能化需求。
关键词:机器人;现场可编程门阵列;温室监控;通用分组无线服务;组态技术;手机终端;智能化
中图分类号: TP273+5文献标志码:
文章编号:1002-1302(2017)16-0214-05
[HJ14mm]
收稿日期:2016-04-13
基金项目:河南省科技攻关计划(编号:132102310030);河南省高等学校重点科研项目(编号:15A413014、16A510017);河南科技学院大学生创新训练项目(编号:2015CX062)。
作者简介:刘艳昌(1979—),男,河南鹤壁人,硕士,讲师,主要从事智能控制与信息检测技术研究。E-mail:523401923@qqcom。
通信作者:李国厚,博士,教授,主要从事计算机控制、无损检测、信号处理技术研究。E-mail:527636704@qqcom。[HJ]
随着计算机、电子、人工智能技术的飞速发展和人们生活水平的提高,人们对反季节蔬菜、水果、花卉等农产品提出了更高的要求,并且随着农业低效高耗的增长方式的转变,对生产温室的需求逐年上升[1-2]。但随着社会的不断进步,劳动力成本的不断上升,这就要求转变温室的生产和管理模式,积极引导传统产业向智能化、科技化、信息化方向发展,提高传统温室产业的科技含量[3],而温室机器人的应用改变了传统的农业劳动方式,克服了传统温室大棚有线监控系统存在布线困难、生产劳动力不足、水资源浪费、无线监控系统监测点多、移植性差、成本高等问题。因此,笔者设计开发一套以机器人为移动终端,以现场可编程门阵列(FPGA)控制器、传感器、无线传输模块和执行机构为硬件核心,以Kingview 655软件为开发平台的机器人温室智能监控系统。
1温室大棚环境智能监控系统总体方案
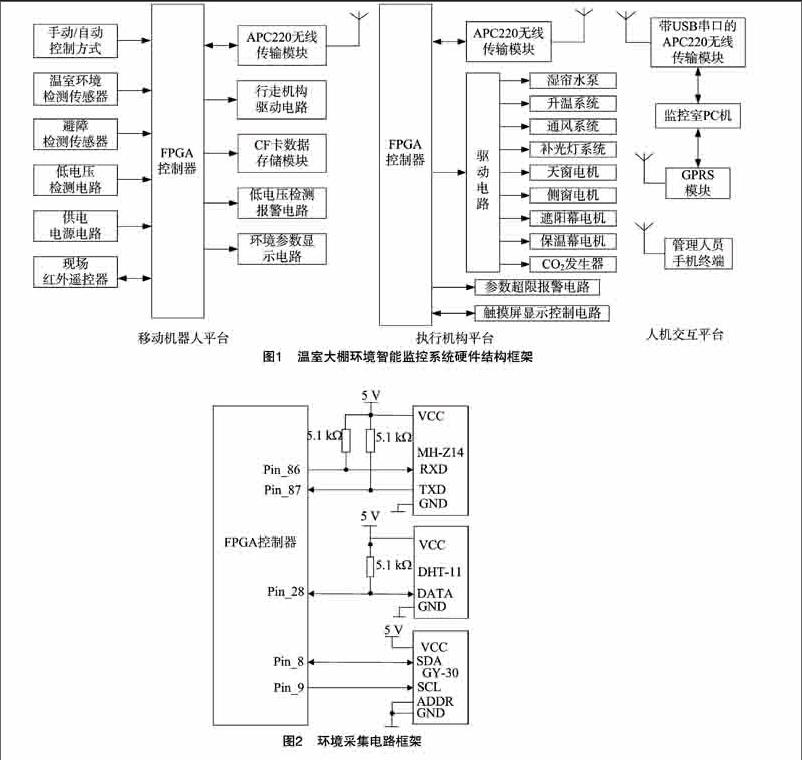
该系统主要由移动机器人平台、执行机构平台和人机交互平台组成,硬件结构如图1所示。
该系统以移动机器人为监测点,具有手动和自动2种控制方式。在手动控制方式下,工作人员可以通过红外遥控器、现场触摸屏、手机短信或监控室个人计算机(personal computer,简称PC)的手动控制画面上相关操作按键对机器人行走和现场执行机构进行启/停控制,进而改变温室环境参数,达到满足植物最佳的生长条件。在自动控制方式下,采用安装在车载上的避障传感器(摄像头、超声波、红外、接触传感器)获取温室内障碍物信息,经FPGA控制器对获得的障碍物信息进行分析判断后,根据避障控制策略和算法作出相应的避障决策,从而实现机器人的行走避障功能,同时无线模块ACP220将获得的障碍物信息发送给PC,以便用户操作和查询;采用安装在车载上的温室环境检测传感器(温湿度、光照、二氧化碳传感器)获取室内环境参数值, 并将获得的参数信息通过无线模块ACP220发送给PC,PC将接收到的参数值与管理技术人员预先设定的植物最佳生长环境参数范围进行比较,若在设定范围内,则执行各机构维持当前状态,若有参数在设定范围之外,则发出相关超限报警信号,同时PC通过带串口APC220无线传输模块将相关执行机构的启/停控制指令传给执行机构平台中的FPGA控制器来实现温室环境的智能控制。
11温室大棚环境智能监控系统硬件设计
111控制器
该系统FPGA控制器采用杭州康芯电子有限公司推出的KX2C5F+型开发板,核心芯片为EP2C5T144,具有内部各功能模块相互独立、引脚丰富、编程灵活、并行处理数据快、易于设计电路扩展等优点。
112环境采集电路设计
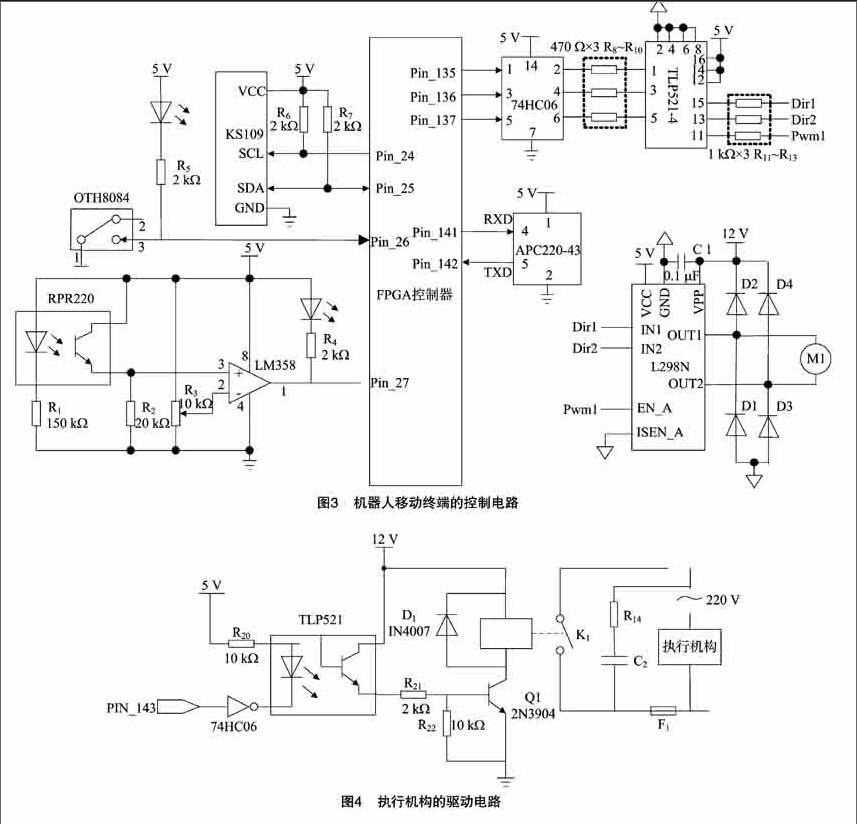
该系统主要对大棚温室内温湿度、CO2浓度和光照度进行实时采集。其中,温湿度传感器采用1-Wire总线接口、数字输出温度和湿度集为一体的DHT11传感器;光照度传感器采用两线式串行总线接口、数字信号输出的GY-30型检测模块传感器;CO2浓度传感器采用红外MH-Z14型传感器,数据传输采用UART通信协议,为使发送和接收采集数据线闲置时状态为高电平,通信线上须外接51 kΩ的上拉电阻[4]。环境采集电路框架如图2所示。
113移动机器人终端控制电路设计
为提高机器人在温室内的移动灵活性、快速性、稳定性,移动机器人采用前后2个万向轮和左右2个驱动轮的四轮轮式结构。在机器人的左右2个轮上分别安装2个独立的驱动电机,通过控制左右轮的速度差来实现车体转向,通过改变步进电机的输入脉冲频率控制调速,实现机器人的前进、左转、右转、后退以及调头等功能。采用避障传感器来获取机器人周边的障碍物信息,其中安装在机器人前端的1路超声波传感器KS109和左右两侧各安装3路等间距的红外传感器RPR220用来获取机器人前方障碍物距离和两侧障碍物的方位信息,以便于实现路径的合理规划;安装在机器人左前、左后、右前和右后方4路接触传感器OTH8084将获取任一个方向上的碰撞信息反馈到
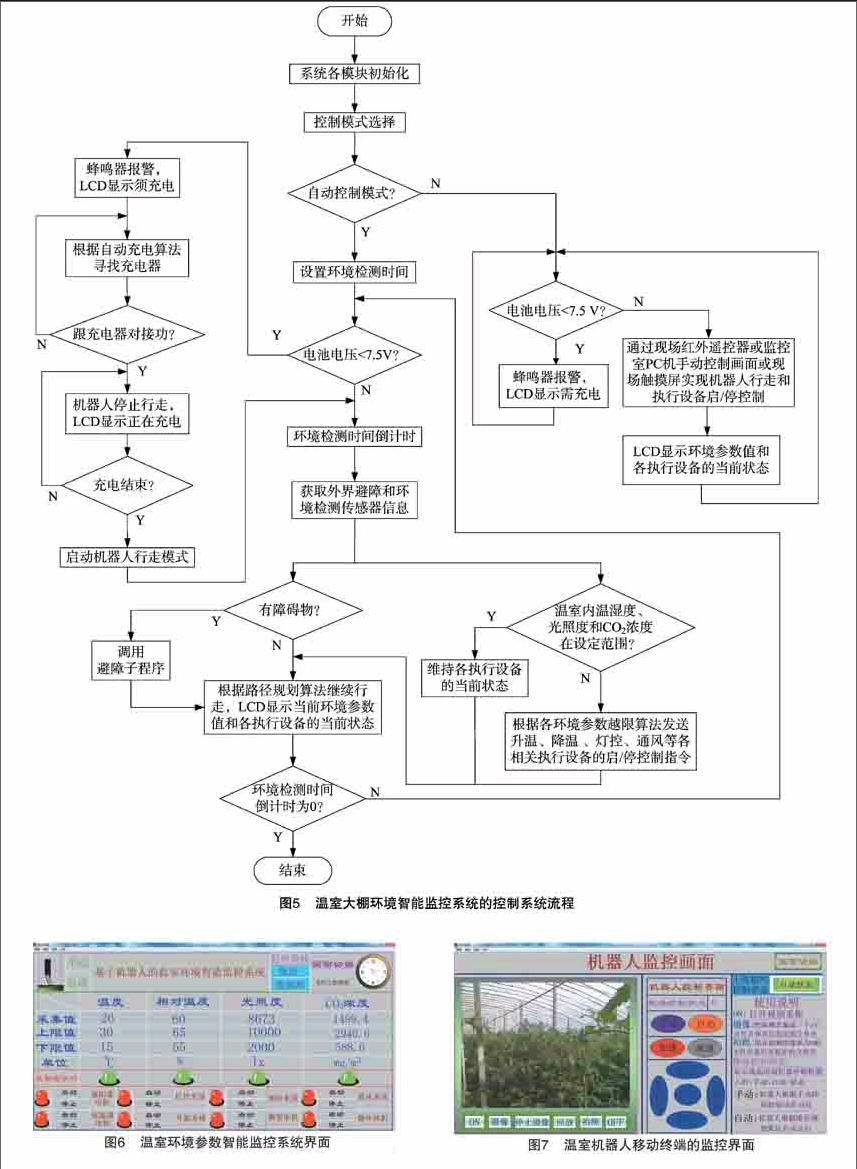
FPGA[CM(235]控制器,以便作出避障决策;安装在机器人上的APC220-43无线模块将检测温室环境参数和障碍物信息发送到监控室PC上,以便于技术人员查阅环境信息以及对现场设备启/停和机器人行走控制。为增强FPGA控制器输出端的驱动能力,在现场FPGA控制器的输出端接74HC06芯片;为避免驱动电路对FPGA控制器输出信号的干扰,在FPGA控制器与电机驱动电路LN298N之间加入光电耦合器TLP521[5-6];为消除电机在启停、制动及换向时产生的反电动势对电机的损坏,在驱动电路L298N和电机之间串入4个(D1~D4)高速大电流肖特基二极管;为改变驱动轮电机的调速控制,可以改变FPGA控制器引脚Pin_137输出的PWM脉冲占空比来实现。机器人移动终端控制电路如图3所示。
114驱动电路
执行机构驱动电路如图4所示。光耦TLP521能够有效抑制继电器触点通断时线圈两端产生的较大感应电动势对FPGA控制器的输出信号干扰;续流二极管IN4007为JQC-3FF-S-HZ继电器断电时提供释放回路,避免反向电动势过高击穿驱动三极管Q1[8];为延长继电器触
点寿命在其两端并联由R14和C2构成阻容电路,同时串入保险丝F1防止电流过大烧坏执行设备和触点[9]。
12温室大棚环境智能监控系统软件设计
121下位机软件设计
利用Quartus Ⅱ 90软件开发平台和verilog HDL编程语言实现避障传感器、环境检测传感器、APC220-43无线传输模块和各执行设备控制的模块化编程。温室控制系统流程如图5所示。
122上位机软件设计
温室环境参数智能监控系统界面如图6所示。上位机监控室PC采用Kingview 655组态软件实现对上位机监控界面和數据分析的设计,该监控画面能准确实时显示采集到的温室环境参数值和执行机构的运行状况,当参数值不在设定范围,则对应报警指示灯闪烁,并将相关设备的启/停控制指令通过APC220-43发送至下位机,从而实现温室环境的自动控制(图6)。同时,管理人员也可在手动或自动控制模式下实现环境参数设置,具有查询实时数据和历史数据等功能。
温室机器人移动终端监控界面如图7所示。管理人员结合监控室PC上组态软件和视频监控,通过点击机器人控制界面相关按钮或在现场借助红外遥控器相关按键,实现机器人的自动和手动运行控制功能。当现场控制状态为0时,上位机可以控制机器人的运行状态,而现场遥控器不起作用;反之,当现场控制状态为1时,现场遥控器可以控制机器人的运行状态,而上位机机器人控制界面不起作用。
除在监控室和现场对温室环境参数实时检测和执行机构启/停控制外,管理人员也可借助GPRS模块、移动网络和手机终端实现对温室环境参数进行数据查询、范围设定、执行设备控制等功能。当用户通过手机向PC连接的GPRS模块DTP_S09发送“环境参数数据查询”指令后,即可收到当前环境参数值,如图8短信发送和接收信息界面中“发信内容”所示[CM(25]。 管理人员也可发送“湿帘水泵启/停”等执行设备控制指令来实现温室环境的远程监控等功能,同时管理人员也可通过选择索引号删除对应短信或点击查询全部按钮在数据库中查询以前收到的短信时间和内容。
2结果与分析
为验证该系统的可行性、有效性、实用性,该系统以种植蝴蝶兰中苗期为研究对象,在校产学研花卉温室种植基地进行测试。
从表1可知,白天(08:00—19:00)温度变化范围为 250~300 ℃,平均值为274 ℃,波动范围为-24~26 ℃;夜里(20:00至次日07:00)温度变化范围为183~228 ℃,平均值为201 ℃,波动范围为-18~27 ℃;与蝴蝶兰生长所需最佳白天温度为27 ℃、夜间温度为20 ℃相比,上下波动较小,且昼夜温差保持在5~8 ℃之间,有利于蝴蝶兰所需养分的积累、健壮生长和叶色纯正;24 h内空气相对湿度变化范围为652%~750%,平均相对湿度为705%,波动范围在-53%~45%之间,能自动维持温室内空气相对湿度在65%~75%之间,有利于蝴蝶兰植株生长、保持叶面水分、防止病害发生等;24 h内温室CO2浓度控制在 8136~1 8606 mg/m3之间,且CO2平均浓度为1 4022 mg/m3,有利于促进蝴蝶兰光合作用,提高产量和增加抗病性能;24 h内温室光照度控制在10 042~20 000 lx之间,平均光照度为15 5484 lx,与蝴蝶兰中苗(待缓苗)生长发育最适宜的光照度 15 000 lx 处相比,上下波动较小,光照度比较稳定,有利于蝴蝶兰获取充足养分、生根和叶片生长。
3结论
针对温室环境参数较难控制、劳动强度高和养殖员工对高温高湿环境不适应等问题,设计开发一种以机器人为移动监测点,以组态软件为上位机开发平台的智能温室环境监控系统。该系统通过移动机器人、执行机构和人机交互三大平台,结合路径规划、避障、多传感器融合和环境参数超限4种算法实现机器人合理行走、数据处理、传输和现场设备远程控制等功能,有效提高了温室环境监控的智能化、信息化管理水平。同时,管理人员也可以借助上位机数据库或手机终端随时查询不同季节、不同品种、不同阶段植物的生长特点和管理规律,为种植户来年获得更高的经济效益提供科学依据。经该河南科技学院产学研花卉温室种植实验基地实测结果表明,智能温室环境监控系统具有工作性能稳定可靠、采集数据
实时性、准确性好、操作简单、抗干扰能力强、成本低等特点,相比以往种植蝴蝶兰产量提高23%、能源成本节约10%、死亡率降低15%、人力成本节约70%,证实了该系统的可行性和实用性,避免了人工操作的主观性和随意性,在农牧业领域具有较高的推广应用价值。
[HS25]参考文献:[HJ187mm]
张卫东 我国温室发展的现状及发展建议[J] 科技信息,2013(10):439
胡刚毅,荣剑,岳晓光 基于FPGA的农林业环境监测机器人系统设计[J] 农机化研究,2013(7):124-126
[3]贾士伟,李军民,邱权,等 温室自动化与机器人的应用[J] 北方园艺,2015(14):194-196
[4]温竹,李士军,张文军,等 基于JN5148的温室CO2浓度监测系统[J] 中国农机化学报,2014,35(2):259-262
[5]李运国 基于FPGA的两轮机器人运动控制系统设计[D] 哈尔滨:哈尔滨工程大学,2013
[6]于笑凡 基于FPGA的中央空调管道清洗机器人设计[J] 仪表技术,2011(11):37-39
[7]钱思 清洁机器人系统设计与智能避障问题的研究[D] 武汉:华中科技大学,2009
[8]仲会娟 基于FPGA的太阳能热水器全功能控制器的研究[D] 天津:河北工业大学,2012
[9]潘书俊,贾兰英,李丽花,等 基于nRF905的鸡舍温湿度采集系统[J] 农机化研究,2012(6):173-175,214
猜你喜欢
军事文摘(2022年19期)2022-10-18
印刷工业(2020年4期)2020-10-27
中国交通信息化(2017年4期)2017-06-06
现代电子技术(2015年10期)2015-05-29
