
中小型LNG船舶操纵性分析
2017-11-01 12:46,,,,
船海工程 2017年5期
,,,,
(1.中海油能源发展采油服务公司,天津 300452;2.上海船舶研究设计院,上海 201203)
中小型LNG船舶操纵性分析
张荣1,周毅1,赵寅2,郑坤1,陆晟2
(1.中海油能源发展采油服务公司,天津 300452;2.上海船舶研究设计院,上海 201203)
分析“海洋石油301”3万m3LNG运输船港内操纵性,以充分发挥出其优良的操纵能力,在合适的环境条件下取代拖船辅助,从而缩短靠泊时间、降低营运成本,发挥最佳经济效益。
中小型LNG船;操纵性;船模试验;实船试验。
“海洋石油301”3万m3LNG运输船是国内首建的中小型LNG船,于2015年5月8日交船并投入运营。该船计划运营海南洋浦到广西防城航线,整个航程直线距离仅133 n mile,以服务航速16.5 kN航行计,单个航程仅约8 h。其营运周期短、频繁靠离泊码头的营运特点凸显了中小型LNG船进行二程转运服务的典型特点。从目前船舶实际运营来看,“海洋石油301”靠离泊码头都采用2艘拖船辅助,增加了船舶靠离泊的时间成本,也增加了租用拖船的经济成本。为此,对该船港内操纵性进行分析,以期提高中小型LNG船的二程转运服务的安全性和经济效益。考虑到船舶自主靠离泊[3]的能力和船舶本身特性及其所在港口的环境条件有密切关系,以“海洋石油301”在防城港渔澫港区第5作业区501号泊位区域环境下的操纵性为例。
1 “海洋石油301”的主要参数
1.1 主尺度

总长/m184.70垂线间长/m175.00型宽/m28.10型深/m18.70设计吃水/m7.40
1.2 推进方案
本船配置2台全回转式电力推进装置[4]和1台艏侧推[5],艉推进器可在360°范围内旋转。产生的船舶回旋力矩比常规推进的转舵力矩大得多。不仅回转半径减少,回转的时间也大大缩短,而且不受低船速下舵效减弱的影响。在2台全回转式电力推进装置和艏侧推的联合作用下可以实现在零航速状态下的原地回转。
3台推进器布置见图1,其他参数见表1。

图1 推进器布置示意
1.3 主推进器工作模式和转换步骤
1)推进操作模式。航速高于10 kn的时候,主推进器处于推进操作模式下,转向范围限制在±35°以内。
2)操纵模式。航速低于10 kn时,处于操纵模式下,主推进器可在360°范围内任意转向,2台主推进器的推进功率和转向角可以分别控制。
3)紧急制动下的模式转换。航速高于10 kn的状态下,需要进行紧急制动,需要按图2的步骤进行,步骤1需要在航速降低到10 kn以下后转入步骤2、3。
2 “海洋石油301”的操纵特点
“海洋石油301”功率大,排水量相对较小。按功率与排水量之比,约3.5 t/kW。而同吨位的油船则达到4.5 t/kW以上,意味着该船相比同吨位液货船有着更强的动力。该船相比于常规的LNG船舶也有着其特有的操纵特点。
1)舵效好,全回转推进器结合首侧推,在零航速下具有优良的转向能力,无须考虑舵效问题。

表1 推进器的配置

图2 推进器模式转换步骤示意
2)用车反应速度迅速,电力推进系统决定了用车反应速度迅速的特点,可以根据操控需要及时调整用车。
3)制动性能良好,可以在较短的距离内停船。
4)自有的动力推进,在紧急情况下,能够迅速自行离开码头,不需要外部支持。
由此可见“海洋石油301”相比常规的LNG船舶操控操控性更好[6],为实现自主靠离泊能力提供了条件。
3 “海洋石油301”的靠离泊过程
501泊位为LNG船专用泊位,考虑当地风况的季风特点,有利于船舶靠离泊安全操作,西南季风时采用掉头靠泊,而东北季风时也可采用直接靠泊方式,从应急离港而言,靠泊船舶船艏朝向便于出港的方向,以利于应急离港操作,进港船舶宜采用掉头右舷靠泊。
船舶靠泊掉头操作中,当本船抵达回旋水域时,控制船速2 kn节以下,根据风向摆正船位略微偏向上风,使用自身推进系统掉头。到达泊位外档3~4 倍船宽时将船摆正,利用风力和推进系统的推力使船舶平行入泊。同时不断调整艏尾各推进器推力,使船艏向达到192°(平行于码头),左右偏差不超过2°,如交角过大,应将船停住把船调至与泊位平行。过程参见图3。

图3 靠泊掉头入港示意
船舶离泊出港时,根据风向调整艏侧推的推力及主推进器的推力和推力方向,利用风力和推进系统的推力使船舶平行出泊,使用船舶自身推进系统调整船位及姿态,船舶至码头前沿水域外距离泊位一定安全距离(根据风力、风向确定)时,艏侧推和主推进器联合作用,使船移向回旋水域并向左转艏,并用主推进器控制避免过量的前冲后缩,在回旋水域中心附近摆正船位后加车提速,进入航道前船速提高到4 kn以上,快车出港。
4 操纵能力船模试验
LNG船的操纵性能对其航行和靠泊期间的安全性具有非常重要的影响,因此,上海船舶研究设计院海洋工程部委托上海船舶运输科学研究所对“海洋石油301”进行了自航船模操纵性试验[7]。为了使试验结果可以和实船试验数据可以比对,在设计吃水工况的状态以外加做了在试航吃水工况下的船模操纵性试验。
对船模操纵性能的研究包括以下内容:①设计吃水下操纵性试验;②设计吃水下低速操纵性试验;③试航吃水下操纵性试验;④试航吃水下低速操纵性试验。
试验在上海船舶运输科学研究所的航海安全水池[8]和风浪流水池进行,包括回转试验、Z形试验、全速倒车停船试验和惯性停船试验在内的常规操纵性试验和包含平移试验、斜移试验和加速回转试验在内的低速操纵性试验,以期对“海洋石油301” 的操纵性能比较全面地做出一个预估[9]。见图4。

图4 操纵性试验模型和水池船模操纵性试验现场
4.1 常规操纵性船模试验
4.1.1 回转试验
装置在航行状态下可进行±35°转动,在设计吃水7.4 m,设计航速16.83 kn状态和试航艏艉吃水5.625 m/7.026 m,试航航速17.38 kn状态分别进行回转试验,结果见表2。

表2 回转试验结果
说明:D/L为相对定常回转直径;DT/L为相对战术直径;Ad/L为相对纵距。
试验结果表明,采用回转式推进装置的船舶的回转能力远高于IMO的要求。
4.1.2 Z形航行试验
在设计吃水7.4 m,设计航速16.83 kn状态和试航艏/艉吃水5.625 m /7.026 m,试航航速17.38 kn状态分别进行了Z形操纵试验,结果见表3、4。试验结果表明,采用回转式推进装置的船舶的初始回转能力和偏航纠正及航向稳定能力远高于IMO的要求。

表3 设计吃水下Z形操纵试验

表4 试航吃水下Z形操纵试验
注:Az'为初始回转能力;θov10-1为10°/10°Z形试验第1超越角;θov10-2为10°/10°Z形试验第2超越角;θov20-1为20°/20°Z形试验第1超越角。
4.1.3 全速倒车停船试验
由于本船使用的是全回转推进器,倒车时螺旋桨不倒转而是将推进器水下部分回转180°,但根据1.3所述,推进器水下部分回转180°需要在船舶航速小于10 kn后才可以执行操作,因此,全速倒车停船事实上分2个阶段,停车惯性减速和推进器水下部分回转180°,全速倒车停船,过程见图5、表5。“海洋石油301”的停船能力明显高于IMO标准的要求。

图5 全速倒车停船轨迹

表5 全速倒车急停试验
注:从停车指令到倒车指令间隔时间相当于实船尺度的150 s。
4.1.4 惯性停船试验

表6 惯性停船试验
注:终结淌航速度小于实船尺度下的5 kn速度。
4.2 低速下特殊操纵性船模试验
4.2.1 横移运动试验
一台艉推横向作用与艏侧推联合作用,首侧推以全功率工作状态下的横移运动。右桨右转90°(左舵)低速正车,左桨0°停车,艏侧推最大转速推船右移。控制右桨转速使船舶向右舷平行横移。见图6。
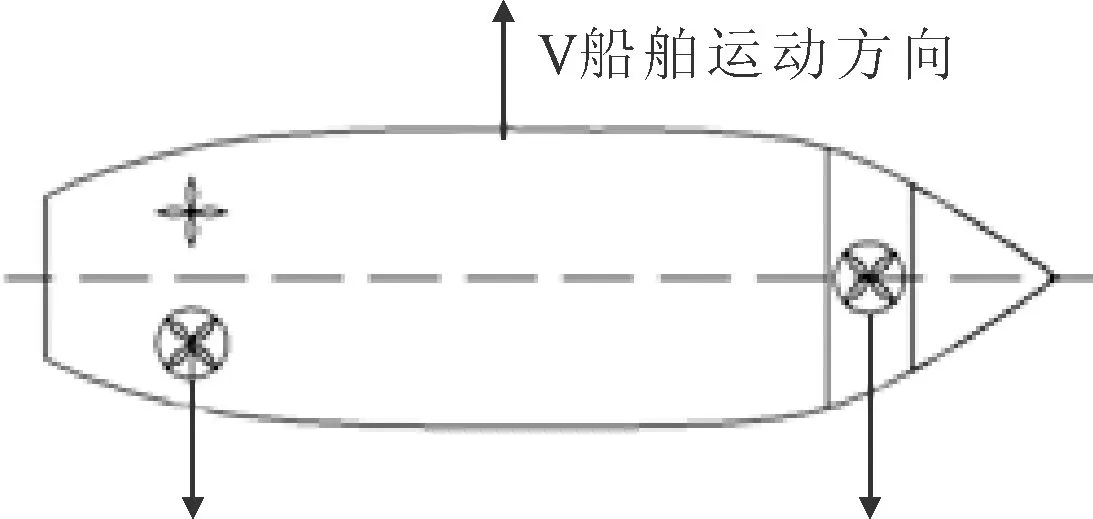
图6 横移运动示意
模型实测和实船推算的运动结果见表7、8。
4.2.2 斜移运动试验
在一台艉推横向作用、另一台尾推以60°方向作用与艏侧推联合作用下,艏侧推以全功率工作的横移运动,见图7。

表7 设计吃水横移运动试验结果

表8 试航吃水横移运动试验结果

图7 斜移运动
模型实测和实船推算的运动结果见表9、10。
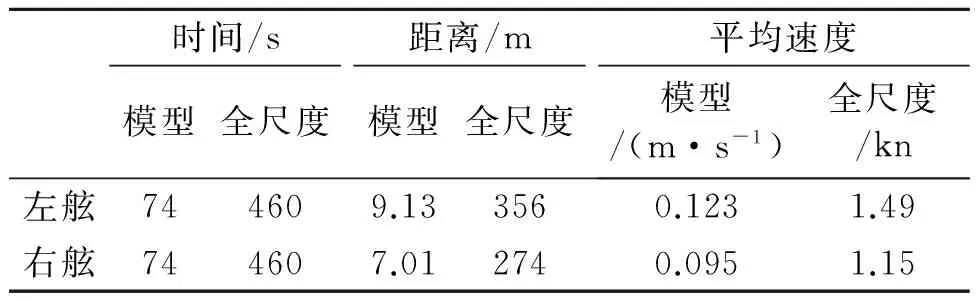
表9 设计吃水斜移运动试验结果
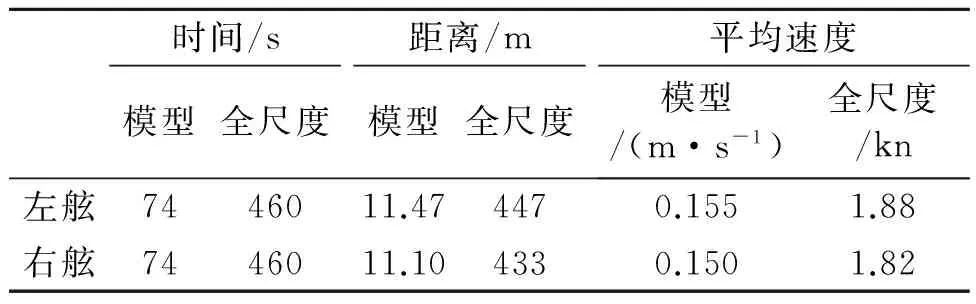
表10 试航吃水斜移运动试验结果
4.2.3 加速回转试验
在1台艉推横向作用,艏侧推参与/不参与工作的状态下的加速回转运动情况,见图8。

图8 加速回转运动
模型实测和实船推算的运动结果见表11。
5 “海洋石油301”操纵能力实船试验
“海洋石油301”海上试航压载工况为艏吃水5.72 m,艉吃水7.04 m。对常规操纵性和低速操纵性进行测量。

表11 设计吃水加速回转运动试验结果

表12 试航吃水加速回转运动试验结果
5.1 实船常规操纵性试验
5.1.1 压载工况12.6 kn航速下回转试验
4级海况,水深73 m,试验结果见表13。

表13 12.6 kn的航速回转航行试验结果
注:D/L:相对定常回转直径;DT/L:相对战术直径;Ad/L:相对纵距。
5.1.2 压载工况16.7 kn航速下Z形航行试验
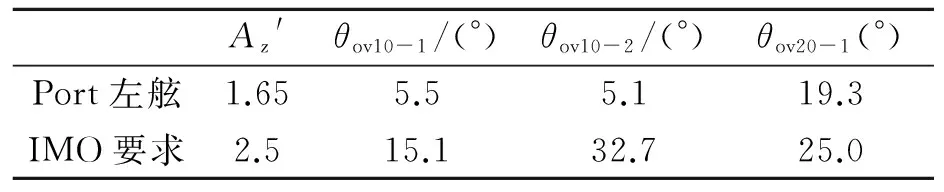
表14 16.5~17.0 kn的航速Z形航行试验
说明:Az′为初始回转能力;θov10-1为10°/10° Z形试验第1超越角;θov10-2为10°/10° Z形试验第2超越角;θov20-1为20°/20° Z形试验第1超越角。
5.1.3 压载工况,16.8 kn航速下全速倒车停船试验
3级海况,相对风向-68°,相对风速22 kn,推进器角度转到-180°后转速稳定在~112 r/min。试验结果见表15。

表15 全速倒车急停试验
5.1.4 压载工况16.1 kn航速下惯性停船试验
4级海况,相对风向-20°,相对风速37.7 kn惯性停船试验,结果见表16。

表16 惯性停船试验
注:终结淌航速度小于实船尺度下的5 kn速度。
5.2 实船低速下操纵性试验
5.2.1 实船横移运动试验
在一台艉推与艏侧推联合作用下,艏侧推以全功率工作状态下的横移运动。右桨右转90°(左舵)低速正车103 r/min,左桨0°停车,首侧推最大转速推船右移。控制右桨转速使船舶向右舷横移。
在5级海况(浪高2.5~4.0 m,风7~8级)下,测量的实船运动结果见表17。

表17 实船横移运动试验结果
5.2.2 加速回转试验
在5级海况,水深75.7 m下,一台艉推横向作用,艏侧推参与/不参与工作的状态下的加速回转运动。实船测量的运动结果见表18。

表18 加速回转运动试验结果
6 结论
“海洋石油301”的常规操纵能力全面明显优于IMO标准,具有良好的操纵性、航向稳定性和停船能力。同时具有良好的低速操纵性,可以在无外力协助的情况下完成掉头、横移、斜移的动作,具有常规船舶不具备的低速操纵性能。为实现自主靠离泊作业提供了可能性。
对于中小型LNG运输船,考虑到其运营特点,需要在推进方案选择上考虑自力靠离泊能力,在允许自力靠离泊的前提下,需要评估推进方案的初投资和后期运营成本。
[1] 蒋致禹,谢仲安,顾敏童.工程船靠泊过程的力学分析[J].船舶力学,2010(12):1394-1404.
[2] 严伟,金峰,韩继斌.船模试验技术及应用[J].湖北水利发电,2008(1):10-12.
[3] 张闯,范中洲.大型船舶自主靠泊方法研究[J].中国水运,2014(8):17-18.
[4] 郑安洪.船舶电力推进系统特点及应用分析[J].珠江水运,2014(19):61-63.
[5] 何金平.中小型LNG船推进系统选型分析[J].船海工程.2014(5):142-144.
[6] 陈伟民,倪士龙.全方位推进器与首侧推器综合作用对船舶操纵性能的影响[J].上海船舶运输科学研究所学报,2005(1).
[7] 刘春生.侧推器协助船舶操纵的仿真研究[D].大连海事大学,2007.
[8] 邹早建.船舶操纵性数值船池开发与应用[A].中国科学技术协会、国防科学技术工业委员会.
[9] 李秋珍,刘畅.船舶操纵性评估体系构架设计[J].舰船电子工程,2012,32(12).
Research of Maneuvering Performance for Middle/small Scale LNG Carrier
ZHANGRong1,ZHOUYi1,ZHAOYin2,ZHENGKun1,LUSheng2
(1.CNOOC Energy Technology & Services-Oil Production Services Company, Tianjin 300452, China;2.Shanghai Merchant Ship Design & Research Institute, Shanghai 201203, China)
The maneuvering performance of 300 000 m3 LNG carrier for HYSY 301 within the port was researched in order to give full play to its good manipulative ability. It could be concluded that under suitable condition of environment it can replace tug auxiliary to reduce the operating cost, shorten the berthing time and play the best economic benefit.
middle/small scale LNG carrier; maneuvering; model test; full-scale ship test
U661.33
A
1671-7953(2017)05-0017-05
10.3963/j.issn.1671-7953.2017.05.006
2017-07-12
修回日期:2017-08-31
张荣(1979—),男,学士,工程师
研究方向:液化天然气(LNG)水上运输技术
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
船海工程(2021年1期)2021-03-02
船海工程(2019年6期)2019-12-25
当代陕西(2018年12期)2018-08-04
珠江水运(2017年17期)2017-10-10
科技创新导报(2016年31期)2017-03-30
小学生时代·大嘴英语(2014年6期)2014-11-04
航海(2014年4期)2014-08-28
中学科技(2009年5期)2009-12-17
