
磁流体动力学角速率传感技术发展现状
2017-11-01 13:10周海佳李得天
真空与低温 2017年5期
周海佳,李得天
(兰州空间技术物理研究所 真空技术与物理重点实验室,兰州 730000)
磁流体动力学角速率传感技术发展现状
周海佳,李得天
(兰州空间技术物理研究所 真空技术与物理重点实验室,兰州 730000)
针对飞行器内微幅、宽频微角振动测量的困难,美国ATA公司研制了基于磁流体动力学(MHD)角速率传感器。与光纤陀螺等器件相比,该传感器具有测量精度高、频谱范围宽、结构简单等特点,在航空航天、地基武器、地震监测等领域具有潜在应用。从MHD角速率传感技术的应用背景出发,通过系统描述高精度、低频等五类MHD角速率传感技术的基本原理、结构组成、关键参数等内容,梳理MHD角速率传感器的发展脉络,并探索性研究MHD角速率传感技术未来发展可能所需突破的关键技术。
磁流体动力学(MHD);高带宽姿态估计;本底噪声;灵敏度
0 引言
导电流体在磁场中运动时,速度场与磁场发生相互作用,从而在垂直于速度场与磁场的方向上建立电场,这就是基于磁流体动力学(Magnetohydrody⁃namic,MHD)角速率传感技术的基本原理[1]。MHD角速率传感器的结构主要由磁回路组件、电回路组件、内置变压器、调理电路等构成,在指向稳定度要求较高的卫星遥感、激光通讯、半导体微印刷等领域具有潜在应用。
由于大气扰动、机构运转和冷热交变等因素,空间飞行器平台具有微幅、宽频的微角振动。其频率从0到几千赫兹,振幅不超过几十微弧度。这种微角振动虽然不会对飞行器结构造成大损伤,但是会影响与指向、瞄准有关的有效载荷性能[2]。低频微角振动(0~10 Hz)可以由高精度三浮陀螺等实现测量,而十赫兹到几千赫兹微角振动的测量是制约高精度指向与瞄准有效载荷性能的突出因素[3]。为了解决机载激光武器视轴稳定问题,20世纪80年代美国应用技术联合体(ATA公司)开发了MHD角速率传感器[4]。与其他类型传感器,例如光纤陀螺、高精度光学敏感器等相比,MHD角速率传感器具有测量精度高、频谱范围宽、结构简单、成本低廉、无机械活动件等特点[5-8]。
根据典型特点与应用情况,将MHD角速率传感器分为高精度、低频、微型、复合式和特定用途等五种。通过不同类型MHD角速率传感器的工作原理、结构特点和关键参数等研究与分析,结合国内的研究进展情况,探索性分析MHD角速率传感技术未来发展所需突破的关键技术。
1 高精度MHD角速率传感技术
2006年,日本发射的先进对地观测卫星(ALOS)采用MHD ARS-12角速率传感器,提出卫星平台的高带宽姿态估计方法[9]。2011年,美国Ball Aerospace&Technologies公司提出了一种基于MHD ARS-15的机载成像设备视轴稳定与后向扫描技术[10]。美国ATA公司采用ARS系列传感器设计了惯性测量单元MIRU系列,可用于地面车辆瞄准、空基与天基飞行器以及深空卫星通讯的视轴颤振抑制[11-12]。美国海军采用ARS-14传感器设计了一种激光束控制系统,用于移动目标的捕获、跟踪与瞄准[13-14]。ATA公司基于ARS-14和15研制了高精度寻北仪[15]。国内的高精度MHD角速率传感器基本处于原理样机阶段,主要是兰州空间技术物理研究所和天津大学[16-17]。
高精度MHD角速率传感器多数采用径向磁场[17],其工作原理如图1所示。当导电液体与外壳产生相对转动时,导电液体上、下两端感生出电势差Vz。该电势差由变压器放大,再通过电路放大、滤波转化成检测信号[18]。
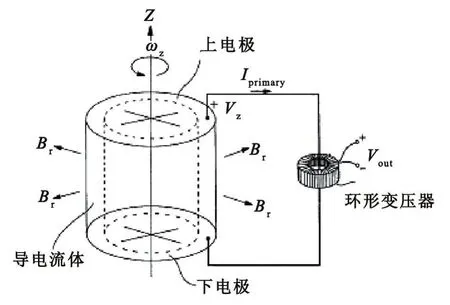
图1 高精度MHD传感器的工作原理Fig.1 The operating principle of high-precision MHD sensor
假设相对角速度ω(t)不随径向和高度方向变化,电势差可以表达为:

式中:Br为磁感应强度;rrms为流体通道的均方根半径;lz为上、下电极间距离;ω(t)为导电流体相对外壳的角速度;Vz(t)为变压器前端电压。
ATA公司研发了多款高精度MHD角速率传感器[19],包括ARS-12、14、15、24。其中,ARS-24的精度最高,其主要参数为:频带为1~675 Hz,本底噪声为<1×10-6rad/s,量程为± 0.005 rad/s,灵敏度为2120 V/rad/s,质量为2 000 g。
MHD角速率传感器的直接输出量为角速率,通过信号的积分或者微分,还可以输出角位移或角加速度[20]。
2 低频MHD角速率传感技术
美国国家公路交通安全管理办公室将ARS-06S低频微角颤振传感器用于汽车碰撞测量,用于评价头部损伤缓冲系统[21]。在国内天津大学对低频MHD微角速率传感技术进行原理性研究[22]。为了进行低频角信号的测量,将传感器内的稳恒磁场变为交变磁场,传感器物理部分的输出信号需要在后端电路上将该交变信号滤除。
低频MHD传感器多采用轴向磁场布局。当环形通道相对于流体检验质量发生旋转时,由于MHD效应在内、外电极之间产生电动势[23-24],其工作原理如图2所示。
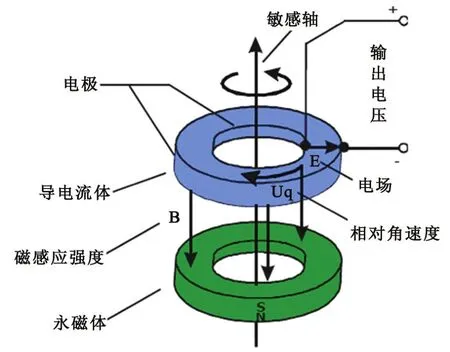
图2 轴向磁场型MHD传感器的工作原理Fig.2 The operational principle of axial-magnetic-field type MHD sensor
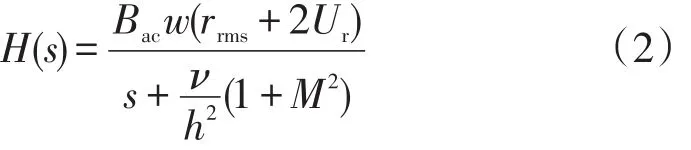
低频角速率传感器的频率响应函数表达为:式中:Bac为交变磁感应强度峰值;w、h、rrms分别为感应通道的宽度、厚度和均方根半径;Ur为径向流速;M为哈特曼数;v为动力学黏度系数;s为复频率变量。
ATA公司开发的最新低频MHD角速率传感器主要是ARS-06和ARS-06S[19]。其中,ARS-06S的测量频带为0.38~1000 Hz,量程为±200 rad/s,本底噪声为2.5×10-3rad/s,灵敏度为0.006 V/rad/s,质量为<35 g。
3 微型MHD角速率传感技术
微型MHD角速率传感器的基本原理与轴向磁场型MHD角速率传感器基本一致,不同之处在于微型MHD传感器没有变压器的一级信号放大,如图3所示。
微型MHD传感器的传递函数表达为[25]:

式中:B0为磁感应强度;r、w为通道的半径、宽度;s为复频率变量;τ为时间常数。
微型MHD传感器的测量频带为1~1000 Hz,本底噪声2 °/s,灵敏度100 mV/rad/s,尺寸Φ12 mm×1.7 mm。
4 MHD角传感/作动复合器件技术
ATA公司设计了用于角位移测量与控制的双功能MHD复合器件,并且通过模拟美国延迟反射镜试验(RME)卫星俯仰控制器进行了分析[26]。MHD作动器的结构与轴向磁场型MHD传感器基本一致,不同之处在于MHD作动器的环形导电流体的内、外径施加电信号,将电能转化成机械能。
由导电流体内、外径的电极施加电压V,从而产生穿过流体的轴向电流i。磁场Br与电流i相互作用的结果是在导电流体与通道之间产生扭矩τρ,如图4所示。所产生的扭矩以及扭矩引起的流体角加速度[27],如式(4)~(5):

式中:v为动力学黏度系数;h、r、A分别为通道厚度、半径、截面积;Br为磁感应强度;θ″FL、θ′FL、θ′CA分别为流体角加速度、角速度和外壳角速度;JFL为流体的转动惯量。
MHD单元的尺寸约为Φ210 mm×30 mm,两个MHD单元堆叠在一起构成MHD角传感/作动复合器件。输出扭矩为1.2 N·m,本底噪声优于0.008°/s,工作频率为1~1 000 Hz,质量为3.8 kg。
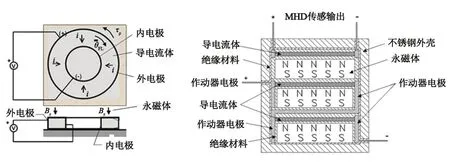
图4 MHD作动器的工作原理和MHD传感/作动单元的结构Fig.4 The operating principle of MHD actuator and the structure of MHD sensing and actuating elements
5 用于地震测量的MHD角速率传感技术
美国能源部使用ARS-16和ARS-24传感器通过对大地的微角震动信号进行测试与分析,研究用于地震监测和地热开发的可行性[28]。用于地震测量的MHD传感器(SMHD)的工作原理、结构组成与高精度MHD传感器基本相同,主要差别在于SMHD所要求的噪声更低,所使用的材料需要满足高温地质环境要求。
ATA研制了用于地震微角信号测量的ARS-16。其频带范围为1~1 000 Hz,灵敏度为500 V/rad/s,本底噪声不大于15 μ·rad/s(1~300 Hz)。ATA还研制了一种新的SMHD原理样机,采用了Ga-In-Ti共熔体作为导电流体[28]。
6 结论
磁流体动力学角速率测量技术,突破了导电流体封装、微弱电流信号原位放大等关键技术瓶颈,具有精度高、频带宽、无机械活动部件等特点,能够一定程度地满足对地观测、激光瞄准等指向与瞄准领域和地热开发等其他领域的需求。
从20世纪80年代开始,美国ATA公司从MHD传感器的机理研究与样机研发开始,经过多年的应用研究与产品验证,已推出多款成熟产品。国内兰州空间技术物理研究所和天津大学在MHD传感器研制方面也做了一些基础性的工作。目前的MHD传感器可以基本满足距离约500 km以下高精度瞄准与指向有效载荷方面的需求,但是对更远距离,如同步轨道(36 000 km),月地激光通讯(380 000 km)乃至更远距离的星际通讯则需要开发精度更高的MHD传感器。未来MHD传感器技术的发展,可以借助数值仿真分析软件和纳米技术,在传感器精度、器件尺寸等方面进行研究,可能需要突破的关键技术包括:
(1)MHD传感器的基础理论研究。目前已经建立初步的磁流体动力学耦合理论,但是要实现提高传感器精度与缩小体积等目标,需要借助数值仿真软件建立包含MHD传感器更多细节,包括空腔表面粗糙度、电极表面电阻、气泡等的全物理模型,为传感器发展奠定理论基础;
(2)MHD传感器的低频极限拓展研究。目前,低频MHD传感器的低频只能做到0.38 Hz,极大地限制了传感器的应用。通过开展磁流体动力学耦合低频信号滤波方法研究,主动式MHD流体驱动技术研究等,分析MHD传感器低频的限制因素;
(3)新型导电流体的研发。导电流体的电阻是导致耦合磁流体电流变小的重要因素。降低导电流体内阻,可以提高耦合磁流体的输出功率,减小内置变压器体积或者取消变压器,从而减小传感器体积。目前导电流体主要采用汞,电阻率比较高。研发新型导电流体,降低传感器内阻是减小传感器体积的关键;
(4)对特殊应用的适应性研究。在地热开发的应用中,MHD传感器需要适应地下的高温环境,需要对传感器结构和电路进行适应性改进。
[1]吴其芬,李桦.磁流体力学[M].长沙:国防科技大学出版社,2007.
[2]薛大同,雷军刚,程玉峰,等.空间微重力干扰因素剖析[C]//第五届海内外华人航天科技研讨会论文集,中国宇航学会,2004:468-475.
[3]吕振铎,雷拥军.卫星姿态测量与确定[M].北京:国防工业出版社,2013
[4]Laughlin D R.Angular motion sensor:US 11/310,4718276[P].1988-1-10.
[5]Meza L,Tung F,Anandakrishnan S.Line of Sight Stabilization of James Webb Space Telescope[C]//27th annual AAS guid⁃anceandcontrolconference,2005:1-15.
[6]Rowlands N,Aldridge D,Allen R,et al.The JWST fine guid⁃ancesensor[J].ProceedingsofSPIE,2004,5487:664-675.
[7]Yahalom R,Moslehi B,Oblea L,et al.Low-cost,compact Fi⁃ber-OpticGyroscopeforsuper-stableLine-of-Sightstabiliza⁃tion[C]//Position Location and Navigation Symposium IEEE,2010:180-186.
[8]Ma H L,Yan Y C,Wang L L,et al.Laser frequency noise in⁃duced error in resonant fiber optic gyro due to an intermodula⁃tioneffect[J].Opticexpress,2015,23(20):1-13.
[9]IwataT,KawaharaT,MuranakaN,etal.High-bandwidthatti⁃tude determination using jitter measurements and optimal fil⁃tering[C]//AIAAGuidanceNavigationandControlConference,2009:1-21.
[10]GutierrezHL,GainesJD,NewmanMR.Line-of-sightstabi⁃lization and back scanning using a fast steering mirror and blendedratesensors[C]//Infotech@Aerospace,2011:1-8.
[11]SebestaHR.Magnetohydrodynamicinertialreferencesystem[J].Proceedings of SPIE-The International Society for Opti⁃calEngineering,2000,4025:99-110.
[12]Tamerler T,Dowling J,Dillow M,et al.A balloon payload for precision scoring of ground and airborne laser systems[C]//InternationalBalloonTechnologyConference,2013.
[13]Dunn N C,Watkins R J,Wick C E.Directed energy beam jit⁃ter mitigation using the Line-Of-Sight reference frame[R].USNA,2011.
[14]Kaufmann J,Hakimi F,Boroson D.Using a low-noise inter⁃ferometric fiber optic gyro in a pointing,acquisition,and trackingsystem[J].ProcofSPIE,2013,8610(3):1-14.
[15]Laughlin D R.Method and apparatus for precision azimuth measurement:US Patent Application 12/572181[P].2009-10-1.
[16]MengjieX,XingfeiL,TengfeiW,etal.Erroranalysisoftheo⁃retical model of angular velocity sensor based onmagnetohy⁃drodynamics at low frequency.Sensors and Actuators A,2015,226:116-125.
[17]霍红庆,周海佳,马勉军,等.MHD角速度传感器磁场设计[J].真空与低温,2011,17(3):151-155.
[18]Laughlin D R.MHD sensor for measuring microradian angu⁃larratesanddisplacements:USPatent6,173,611[P].2001-1-16.
[19]Angular rate sensors[EB/OL].(2011)[2015-09-20].http://www.aptec.com/angular_rate_sensors.html.
[20]Burke W V.Evaluation of a prototype magnetohydrodynamic angularaccelerationtransducer[R].DOTHS,1993:1-43.
[21]Merkle A C,Wing I,Szcepanowski RS,et al.Evaluation of Angular Rate Sensor Technologies for Assessment of Rear Impact Occupant Responses[R].Laurel MD 20723-6099,2007:1-45.
[22]Ji Y,Li X,Wu T,et al.Theoretical and experimental study of radial velocity generation for extending bandwidth of magne⁃tohydrodynamic angular rate sensor at low frequency[J].Sen⁃sors,2015,15(12):31606-31619.
[23]LaughlinDR.Lowfrequencyangularvelocitysensor:USPat⁃ent5176030[P].1993-1-5.
[24]Laughlin D R.Active magnetohydrodynamic rate sensor:US Patent5665912[P].1997-9-9.
[25LaughlinDR.Low-profilemagnetohydrodynamicmotionsen⁃sor for an electronic system:US Patent 5461919[P].1995-10-31.
[26]Laughlin D,Sebesta H,Eckelkamp-Baker D.A Dual Func⁃tion Magnetohydrodynamic(MHD)Device for Angular Mo⁃tion Measurement and Control[C]//25th annual guidance AASguidanceandcontrolconference,2002:1-15.
[27]Laughlin D R.Magnetohydrodynamic(MHD)actuator sen⁃sor:USPatent7171853[P].2007-2-6.
[28]Pierson B,Laughlin D.Rotation-Enabled 7-Degree of Free⁃dom Seismometer for Geothermal Resource Development.Phase 1 Final Report[R].A-Tech Corporation dba Applied Technology Associates,Albuquerque,NM(United States),2013.
RESEARCH OF MAGNETOHYDRODYNAMIC ANGULAR RATE SENSING TECHNOLOGY
ZHOU Hai-jia,LI De-tian
(Science and Technology on Vacuum Technology and Physics Laboratory,Lanzhou Institute of Physics,Lanzhou 730000,China)
Aimed at the difficulty about measurement of the high bandwidth and small magnitude micro-angular vibration in the aircraft,ATA corporation in USA designed the type of angular rate sensing device based on the magnetohydrodynamic effect(MHD).In comparison to other devices,such as fibre-optic gyroscope,the sensors have properties of high-precision,high-bandwidth and simple in construction,so they can be used in many areas,such as aeronautics and space,ground based weapons,and seismic monitoring.It reviews the background of MHD angular rate sensing technology.Through the systematic depiction about some devices including high-precision MHD angular rate sensor,low-frequency MHD angular rate sensor and so on,which concerns the fundamental principles,structural constitutions and key parameters,it sorts out the routine of the development of MHD angular rate sensing technology.It also trially studies the fundamental technical elements which may hinder the advancement of this technology.
Magneto Hydro Dynamic(MHD);high-bandwidth attitude estimation;noise floor;sensitivity
O361
A
1006-7086(2017)05-0249-05
10.3969/j.issn.1006-7086.2017.05.001
2017-05-12
周海佳(1983-),男,山西寿阳人,博士研究生,从事航天器微振动测量与抑制研究工作。E-mail:zhouhj2001@163.com。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
包装工程(2022年14期)2022-07-28
物理之友(2022年1期)2022-04-19
陶瓷学报(2021年5期)2021-11-22
小天使·一年级语数英综合(2020年5期)2020-12-16
黑龙江科学(2020年10期)2020-06-06
电子制作(2019年9期)2019-05-30
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
