
冬油菜田杂草探测光谱传感器设计与应用
2017-11-01 23:07魏新华毛罕平
农业工程学报 2017年18期
李 林,魏新华,毛罕平,吴 姝
冬油菜田杂草探测光谱传感器设计与应用
李 林,魏新华,毛罕平,吴 姝
(江苏大学现代农业装备与技术教育部重点实验室,镇江 212013)
杂草的精确识别是对靶施药和自动化机械除草的关键前提,基于光谱分析技术的光谱传感器可以实现快速、无损的杂草识别。该文以冬油菜苗期杂草为研究对象,根据试验选取的4个特征波长点(595、710、755和950 nm),设计了一种能自动识别杂草的光谱传感器。根据光学系统原理和田间实际操作要求,提出了该光谱传感器的结构设计方案,选择了合适的光学器件,并开发了光谱传感器信号调理电路。对光谱传感器进行了标定和试验验证,根据便携式光谱仪和光谱传感器在4个波长下的测量结果建立了相应的标定方程,方程的决定系数分别为0.799、0.812、0.892和0.867,验证试验结果的相对误差绝大多数都在10%以内,可以识别冬油菜苗期田间杂草。该传感器为杂草自动探测装置的开发提供了参考。
传感器;设计;试验;杂草探测;光谱传感器;信号调理;光学系统
0 引 言
田间杂草的精确识别是实现除草剂变量喷施和机械除草的关键因素,国内外学者运用机器视觉[1-3]、光谱检测[4-5]、多光谱成像[6-8]等技术在该方面进行了大量研究,并设计了田间杂草信息获取设备[9-11]。其中,基于光谱检测分析技术进行杂草识别的方法根据一定波段内作物、杂草和土壤的反射率差异进行识别。该方法识别速度快,具有无污染以及不破坏样品等优点,并且光谱传感器结构简单、成本低[12]。
Wang等[13]利用光敏晶体管和中心波长分别为496、546、614、676和752 nm的带通滤光片研制了光学杂草传感器,并开发了一套除草剂变量喷洒装置,经过良好训练,杂草的实时识别精度优于70%。邓巍等[14-15]利用便携式野外光谱仪,分别测量了田间3种作物(玉米、马唐和稗草)植株冠层的光谱数据(波长范围在350~2 500 nm)。对预处理的光谱数据采用支持向量机建立分类模型,试验验证该方法识别精度达到80%以上,并在此基础上研究了基于单片机和光电器件OPT101的绿色植物靶标探测器。在国外能区分绿色植物和土壤的光谱传感器已经商业化,如美国NTech公司开发的杂草探测传感器WeedSeeker[16]、荷兰Rometron公司的Weed-IT系列杂草探测传感器[17]等。其中,WeedSeeker选用770 nm近红外光和656 nm红外光作为特征光谱进行植被检测,并对检测到的植被进行针对性喷洒,Weed-IT通过探测红外光的强度识别植被和土壤。在实际应用中能精确区分杂草和作物的光谱传感器尚处于研究阶段。
本文拟以冬油菜苗期田间杂草识别为目标,根据已有研究成果[18]所得特征波长710、755、950、595 nm与识别模型,研究设计基于光谱敏感波段的杂草识别光谱传感器,以期为杂草自动识别装置的开发提供参考。
1 光谱传感器设计
1.1 光谱传感器测量原理
光谱信息本身是由物体的内在性质决定的,由于作物与杂草组成成分和结构有所差异,其对光谱有不同的反射特性,因此,可以利用光谱反射率之间的差异来研究杂草的种类鉴别问题[2]。光谱传感器采集特征波长对应的光谱信息,通过光电池转换成电信号,并对微弱的电信号进行转换、放大和滤波处理,根据传感器的输出信号即可识别田间常见杂草。
1.2 传感器总体结构
光谱传感器由主动光源、凸透镜、滤光片、光电池和信号调节装置组成,如图1所示。其中主动光源选择中心波长为595、710、755、950 nm的LED灯,每4个波长的LED灯交替紧密排列组成一个正方形阵列;凸透镜选择型号为GL-016-016、直径为16 mm、焦距为16 mm的K9双凸透镜;滤光片选择中心波长为595、710、755 、950 nm,半峰值带宽为10 nm,通光孔径为16 mm的窄带干涉滤光片;信号调理电路[19-21]主要包含I/V转换电路、信号放大电路和滤波电路部分。

图1 光谱传感器的组成部分示意图
1.3 光路系统设计
在田间实际应用中,冬油菜苗期油菜苗和杂草的面积较小,则光谱传感器的视场直径在80 mm左右,传感器工作时其实际测试距离即物距在500 mm左右。光谱传感器的光路系统设计如图2所示。

注:ω为视角,(°)。
综合考虑各个因素,选取视场直径=80 mm、物距=500 mm。选用光电池的大小2.65 mm×2.65 mm,光电池直径为2.65 mm。通过式(1)可确定该光路系统的物距为16.6 mm。由于物距远远大于像距,根据透镜成像式(2)可知,光电池安装在接近凸透镜的焦平面处。根据式(3)可知,此时系统的视场角=9°。

式中为视场直径,mm;为光电池直径,mm;为物距,mm;为焦距,mm;为像距,mm;为视场角,rad。
光谱传感器[22-23]以光电池为光电转换器件,光电池的光敏面积与其频率响应特性有关,面积越大,响应频率越慢,且产生噪声也越多。但是光电池的光敏面积受到光学系统和大视场的制约,最小光敏面直径应满足式(4)[24-25]。

式中1为光学系统入瞳有效直径,mm;为空气的折射率,取1.0。
光学系统入瞳有效直径的大小影响反射光进入通光孔径的数量,进而影响光电池的响应电流。为防止外界杂光的进入,通光孔径不宜过大,根据式(4)可知,光学系统入瞳有效直径1满足:

通过计算可知:通光孔径1应小于17 mm;由此可以确定凸透镜和滤光片通光孔径均稍微小于17 mm。此时,光电池可以有效地接收到被测物体的反射光线。
1.4 传感器内部结构设计
在田间进行实际测量时,光谱传感器的测试距离很难恒定为500 mm。物距的变化会引起反射到光电池上的光线不稳定,导致测量信号产生误差,从而传感器精度下降。为保证光谱信息传递的准确性,需要对光谱传感器的内部结构进行设计。光谱传感器内部每个波长(710、755、950、595 nm)对应一个光学通道,则传感器共有4个光学通道。4个通道的排列情况如下:1个通道处于中心位置,其余3个通道依次围绕中心通道等角度均布。
为了确保田间探测时4个通道的视场范围基本一致,需要确定中心位置通道与其他3个通道光轴的夹角。图3给出了中心光轴与周围光轴夹角示意图,其中光电池1对应的光轴为中心光轴,其方向与视场中心垂直;光电池2对应的光轴与主光轴夹角为。试验中3个通道依次围绕中心通道等角度均布,因此仅分析其中一个通道与中心光轴之间的关系即可。
由图3可知,为了保证中心通道与周围通道视场范围基本一致,需要满足2个光轴交点在视场的中心,并且满足式(6)。当物距=500 mm,视场=80mm时,通过式(6)可以得到4.4°。随视场增大而减少,根据实际需要,试验时设置为5°。

光谱传感器机械结构如图4所示,光电池、凸透镜、滤光片在通道内依次排开,通过内凹槽固定,橡胶垫圈用于保护光学器件、减少磨损。光电池与凸透镜的距离为16.6 mm,凸透镜与滤光片、滤光片与镜头外侧的距离均为10 mm;中心通道光轴与外侧圆周通道光轴的夹角为3°,镜头的通光孔径为16 mm。镜头平均分为3部分,各个部分之间通过侧向螺钉连接,便于安装内部器件,两侧端盖均用螺纹连接。
1.光电池 2.凸透镜 3.滤光片 4.保护镜片 5.外壳 6.LED光源 7.信号调理板
1.Photocell 2.Convex lens 3.Light filter 4.Cover lens 5.Shell 6.LED light source 7.Signal control circuit board
图4 光谱传感器机械结构
Fig.4 Mechanical structure of spectral sensor
由于田间作业时,测量结果易受天气状况的影响,故本文采用主动光源为发光方式。根据光谱传感器探测镜头的结构,设计3组LED光源,每组光源内部即一个正方形阵列,3组光源与3个周围通道依次交错排列一周。根据聚光原理,每组光源内部安装一个抛物线反射器,LED光源产生的光线照射到反射器上,反射器对光线进行反射,经过500 mm的物距反射光线照射到样本上。当反射器包角为240°时,1个阵列产生的中心光圈直径为80 mm,设置3个LED阵列能保证光强以及中心光圈的大小,便于传感器探测其视野范围内的样本。其具体排列方式如图4所示。
当光谱传感器的物距为500 mm时,周围通道的视场范围与中心通道的视场范围基本重合,为直径80 mm的区域;当物距变小时,周围通道与中心通道视场重合范围稍微变小,在物距为400 mm时,其视场范围是直径为60 mm左右的区域,此时周围通道与中心通道的视场范围大部分都重合,可以进行光谱探测;如果物距继续变小,则周围通道与中心通道视场范围的重合部分就会过小,进入各个通道的光线不同,导致探测结果不准确,识别困难。当物距增大时,周围通道与中心通道视场重合范围同样也会变小,为700 mm时,其视场范围是直径为100 mm左右的区域,此时重合范围较大,可以进行光谱探测;当物距继续增大时,其重合范围也会过小。因此,光谱传感器的物距为400~700 mm,其对应视场范围的直径为60~100 mm。
1.5 电路部分设计
测量光谱作物信息时,光谱传感器的输出信号为微安级微弱信号,易受到背景噪声的干扰。因此,设计的信号调理电路能够满足可靠、不失真地将光谱传感器的输出信号进行放大、滤波等要求。
芯片ICL7650[26]是采用动态校零技术和CMOS工艺制作的斩波稳零式高精度运算放大器,输入偏置电流小、失调小、增益高、共模抑制能力强、响应快、漂移低、性能稳定。故选择由ICL7650和若干电阻组成的T型I/V转换放大电路将电流信号转换为电压信号,其输出信号变为毫伏级[27]。选择1A的电流信号转化成100 mV的电压信号等级,对应计算电路参数为:(1+2)=10 kΩ,(1+4/3)=10,考虑到微控制器A/D转换的要求,需将转换后的毫伏数量级电压信号转换为0~3.3 V电压信号,因此,本文选择由INA121与若干电阻组成的典型放大电路对毫伏数量级的电压信号进行信号放大,选择外接电阻4的阻值为2 kΩ,得到电路的增益为26,可以将毫伏数量级的电压转换到伏级,从而满足实际采样电压要求;然后通过二阶低通滤波电路滤除电压信号中的高频干扰,以提高光谱传感器的灵度敏。根据直流信号处理原则和截至频率n=1/2π,设定截至频率10 Hz,计算出6=7=16 kΩ,2=3=1 F,其信号调理电路原理如图5所示,光谱传感器的实物如图6所示。
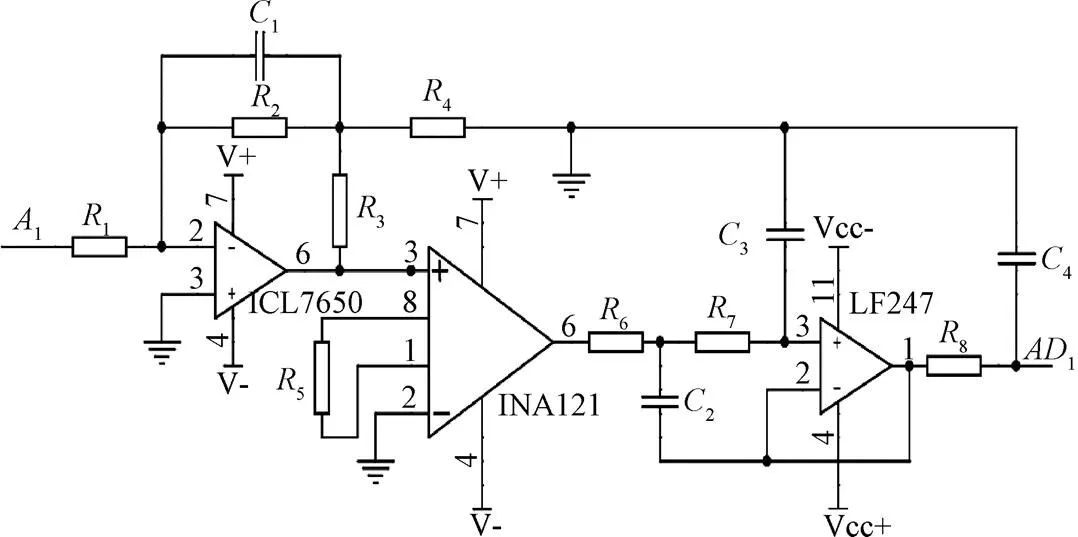
注:A1为调理电路输入信号;AD1为调理电路输出信号;Ri(i=1,2,…,8)为电阻,Ω;Ci (i=1,2,…,4)为电容,F;ICL7650为斩波稳零式高精度运算放大器;INA121为低功耗运算放大器;LF247为高速运算放大器。

图6 光谱传感器实物
2 试验与结果分析
2.1 光谱传感器标定试验
光谱传感器的标定试验于2016年1月20日在江苏大学农业工程研究院实验室内进行。分别采集冬油菜苗、杂草、土壤的样本放入保鲜袋,立即送往实验室,进行试验。其中冬油菜苗样本为田间随机选取的3~6叶处于苗期且正常生长的样本,杂草样本选择5种冬油菜中最常见的处于生长期的杂草(婆婆纳、刺儿菜、荠菜、小飞蓬、粘毛卷耳),土壤样本为田间随机采集的土壤。
试验中,采用研制的光谱传感器测试样本,并得到输出电压;同时,使用美国ASD公司的FieldSpec®3便携式光谱分析仪[28-29]同步测量样本的光谱数据信息,在视场范围内随机测量5个点的光谱信息,并取其平均值。FieldSpec®3便携式光谱分析仪的光谱范围为350~2 500 nm,光谱分辨率分别为3(350~1 000 nm)和10 nm(>1 000~2 500 nm),在350~1 000 nm范围内采样间隔为1.4 nm,在>1 000~2 500范围内采样间隔为2 nm。为确保试验精度,测量时探测镜头在500 mm处垂直于样本表面放置,此时视场范围为80 mm。图7为不同波段下光谱反射率与传感器电压拟合曲线。
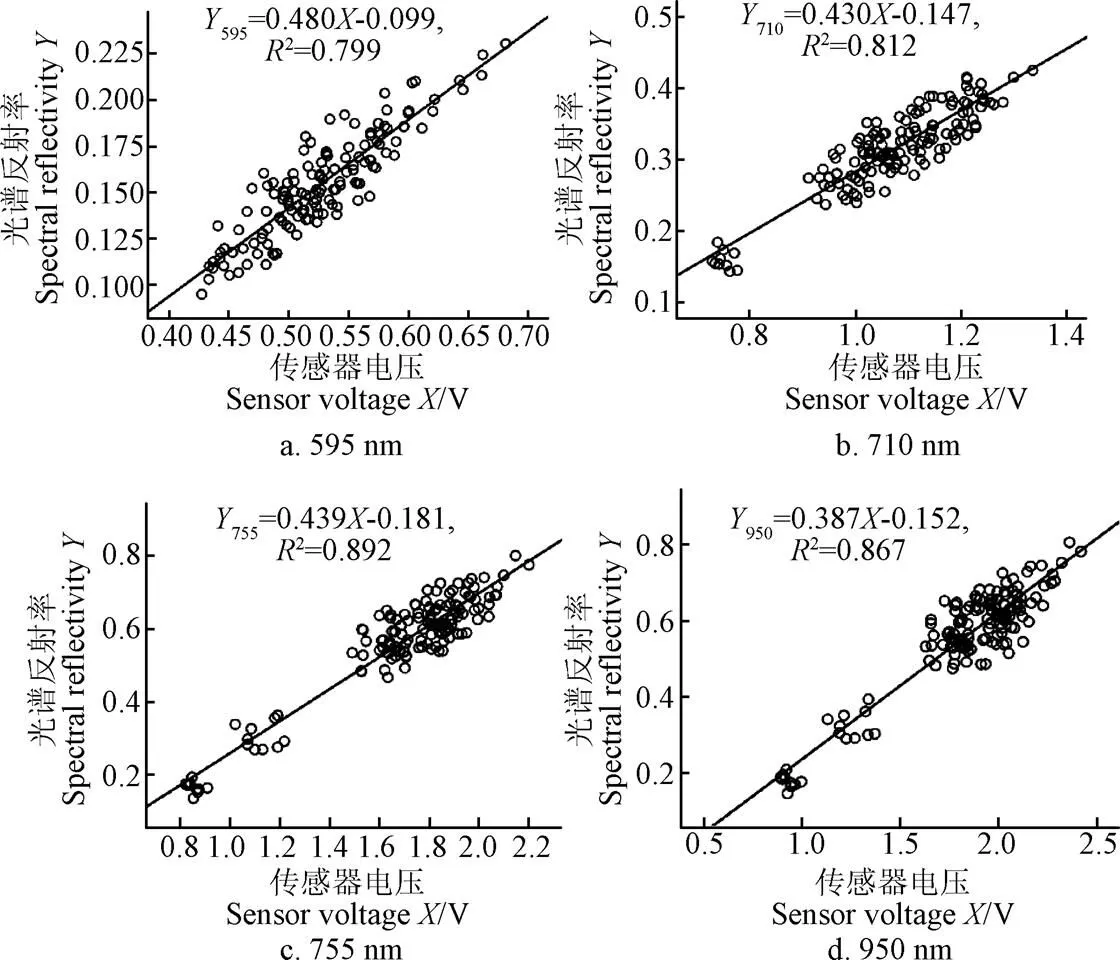
图7 不同波段下光谱反射率与传感器电压拟合曲线
为保证测量范围,把各个种类的叶片拼接成直径为110 mm的圆,由双面胶固定在卡纸上,每个样本所得的大范围面积为:油菜4个样本;5种杂草,每种杂草各4个样本;干土壤2个,湿土壤2个样本。为了确保数据的可重复性和模型的鲁棒性,在每个大范围面积的样本表面选择合适的位置采集5个点,每个点测5次取平均值。分别记录便携式光谱仪和光谱传感器在710、755、950和595 nm处对应点的测量结果,结果见图7,同时对测量数据进行拟合[30-31]。
通过以上分析可知,各个标定方程的决定系数均较高,595、710、755和950 nm共4波段处的决定系数2分别为0.799、0.812、0.892、0.867。
2.2 验证试验
为了验证传感器的可靠性,试验以冬油菜苗为例,在校内实验室进行。于江苏大学试验田采集冬油菜苗样本放入保鲜袋,立即送往实验室,进行试验。试验现场如图8所示。

1.光源 2.处理器 3.被测物 4.光纤探头 5.光谱仪主机 6.试验支架 7.直流电源 8.万用表 9.被测物 10.光谱传感器
光谱传感器测试结果通过标定试验公式进行计算,转化成光谱反射率。验证结果如表1所示。

表1 不同波段下光谱传感器和光谱仪测定光谱反射率对比
由传感器测量结果计算所得的光谱反射率,通过与FieldSpec®3便携式光谱分析仪测试结果进行对比分析可知:在各个特征波长下的大部分相对误差均小于10%,有小部分超过10%,其中最大相对误差为16.58%。在测量时,传感器和便携式光谱仪在每个叶片的相同位置均测量1次,由于叶子的移动可能造成测试位置点的重合度有所偏差,其造成相对误差较大。但总体来看,该光谱传感器能实现光谱反射率的测量。
分别采集油菜样本20组,土壤样本20组,常见5种杂草(婆婆纳、刺儿菜、荠菜、小飞蓬、粘毛卷耳)样本各20组,每组数据采集3次,取其平均值。为了验证该杂草传感器的有效性,采用前期建立的贝叶斯判别函数模型,对采集的数据进行识别,识别结果如表2所示。140组数据平均识别时间为76.3 ms,满足实际应用的需求。
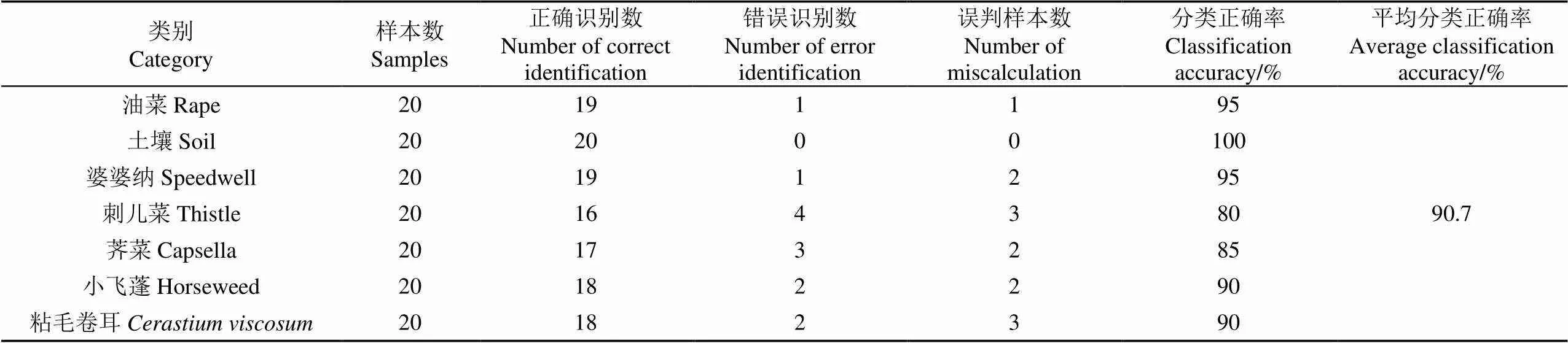
表2 杂草识别结果
由表2可知,试验中土壤的正确识别率为100%。美国NTech公司成功开发的杂草探测传感器WeedSeeker[16]对区分绿色植物和土壤也具有很高的识别率,但WeedSeeker仅能识别绿色植物和土壤,无法实现杂草与作物的识别。在实际应用中,迫切需要进行杂草与作物的识别并将其用于变量喷施及机械除草。本文主要针对冬油菜苗期田间杂草进行作物与杂草的识别,从试验识别结果中可以看出,对于油菜常见的5种杂草,平均分类正确率为90.7%,该传感器具有较好的识别效果。
本文设计的传感器中采样时间主要是光信号转换成电信号的时间,本试验选用的光电池响应时间为500 ns,采样速率最高可达每秒2×108次。此外,该传感器目前主要针对处于苗期的冬油菜苗,目前可对油菜最常见的5种杂草(婆婆纳、刺儿菜、荠菜、小飞蓬以及粘毛卷耳)进行有效识别。
3 结论与讨论
1)基于试验选定的4个波长595、710、755、950 nm,设计了一种光谱传感器,用于识别冬油菜苗期田间杂草。光谱传感器包括4个光学通道和3个主动LED光源,其中凸透镜、滤光片、光电池在各光学通道内依次排列,以进行光谱信息的探测,开发了传感器硬件电路部分。
2)通过对传感器进行标定试验,得到4个波长下的标定方程,其决定系数分别为0.799、0.812、0.892、0.867,模型具有较好的相关性;试验验证结果的相对误差大部分都在10%以内。
3)使用该传感器进行冬油菜中常见杂草的识别试验,平均分类正确率为90.7%,具有较好的识别效果。
在实际试验中,本文设计的杂草探测光谱传感器测得的光谱数据容易受到田间光照变化的影响,而且路面颠簸及传感器本身的机械振动也会给识别精度带来影响,因此如何降低干扰因素影响,提高传感器的鲁棒性尚需进一步深入研究。
[1] Slaughter D C, Giles D K, Downey D. Autonomous robotic weed control systems: A review[J]. Computers and Electronics in Agriculture, 2008, 61: 63-78.
[2] Tang J, Chen X, Miao R, et al. Weed detection using image processing under different illumination for site-specific areas spraying[J]. Computers and Electronics in Agriculture, 2016, 122: 103-111.
[3] 吴迪,黄凌霞,何勇,等. 作物和杂草叶片的可见-近红外反射光谱特性[J]. 光学学报,2008,28(8):1618-1622.
Wu Di, Huang Lingxia, He Yong, et al. Visible-near infrared reflection spectroscopy for crop-weed discrimination[J]. Acta Optica Sinica, 2008, 28(8): 1618-1622. (in Chinese with English abstract)
[4] 祖琴,邓巍,王秀,等. 主成分分析和SIMCA的甘蓝与杂草光谱识别方法研究[J]. 光谱学与光谱分析,2013,33(10):2745-2750.
Zu Qin, Deng Wei, Wang Xiu, et al. Research on spectra recognition method for cabbages and weeds based on PCA and SIMCA[J]. Spectroscopy and Spectral Analysis, 2013, 33(10): 2745-2750. (in Chinese with English abstract)
[5] Go’mez-Casero M T, Castillejo-Gonza’lez I L, Garc’a-Ferrer A, et al. Spectral discrimination of wild oat and canary grass in wheat fields for less herbicide application[J]. Agronomy for Sustainable Development, 2010, 30(3): 689-699.
[6] Wendel A, Underwood J. Self-supervised weed detection in vegetable crops using ground based hyperspectral imaging[C]//IEEE International Conference on Robotics and Automation, 2016.
[7] 祖琴,张水发,曹阳,等. 结合光谱图像技术和SAM分类法的甘蓝中杂草识别研究[J]. 光谱学与光谱分析,2015,35(2):479-485.
Zu Qin, Zhang Shuifa, Cao Yang, et al. Research on Identification of cabbages and weeds combing spetralimaging technology and SAM taxonomy[J]. Spectroscopy and Spectral Analysis, 2015, 35(2): 479-485. (in Chinese with English abstract)
[8] 赵川源,何东健,乔永亮. 基于多光谱图像和数据挖掘的多特征杂草识别方法[J]. 农业工程学报,2013,29(2):192-198.
Zhao Chuanyuan, He Dongjian, Qiao Yongliang. Identification method of multi-feature weed based on multi-spectral images and data mining[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(2): 192-198. (in Chinese with English abstract)
[9] 张小龙,谢正春,张念生,等. 豌豆苗期田间杂草识别与变量喷洒控制系统[J]. 农业机械学报,2012,43(11):220-225,273.
Zhang Xiaolong, Xie Zhengchun, Zhang Niansheng, et al. Weed recognition from pea seedling images and variable spraying control system[J]. Transaction of the Chinese Society for Agricultural Machinery, 2012, 43(11): 220-225, 273. (in Chinese with English abstract)
[10] Wang N, Zhang N, Wei J, et al. A real-time embedded weed-detection system for use in wheat fields[J]. Biosystems Engineering, 2007, 98(3): 276-285.
[11] Nieuwenhuizen A T, Hofstee J W, Henten E J. Performance evaluation of an automated detection and control system for volunteer potatoes in sugar beet fields[J]. Biosystems Engineering, 2010, 107(1): 46-53.
[12] Hurado M, Lopez-Granados F, Stenciano S, et al. Discrimination of weed seedlings, wheat (Triticum aestivum) stubble and sunflower (Helianthus annuus) by near-infrared reflectance spectroscopy (NIRS)[J]. Crop Protection, 2003, 22(3): 1177-1180.
[13] Wang N, Zhang N, Dowell F E, et al. Design of an optical weed sensor using plant spectral characteristics[J]. Transactions of the ASAE, 2001, 44(2): 409-419.
[14] 邓巍,张录达,何雄奎,等. 基于支持向量机的玉米苗期田间杂草光谱识别[J]. 光谱学与光谱分析,2009,29(7):1906-1910.
Deng Wei, Zhang Luda, He Xiongkui, et al. SVM-based spectral recognition of corn and weeds at seedling stage in fields[J]. Spectroscopy and Spectral Analysis, 2009, 29(7): 1906-1910. (in Chinese with English abstract)
[15] 邓巍,赵春江,何雄奎,等. 绿色植物靶标的光谱探测研究[J]. 光谱学与光谱分析,2010,30(8):2179-2183.
Deng Wei, Zhao Chunjiang, He Xiongkui, et al. Study on spectral detection of green plant target[J]. Spectroscopy and Spectral Analysis, 2010, 30(8): 2179-2183. (in Chinese with English abstract)
[16] 马旭,齐龙,梁柏,等. 水稻田间机械除草装备与技术研究现状及发展趋势[J]. 农业工程学报,2011,27(6):162-168.
Ma Xu, Qi Long, Liang Bai, et al. Present status and prospects of mechanical weeding equipment and technology in paddy field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(6): 162-168. (in Chinese with English abstract)
[17] 毛文华,张银桥,王辉,等. 杂草信息实时获取技术与设备研究进展[J]. 农业机械学报,2013,44(1):190-195.
Mao Wenhua, Zhang Yinqiao, Wang Hui, et al. Advance techniques and equipment for real-time weed detection[J]. Transaction of the Chinese Society for Agricultural Machinery, 2013, 44(1): 190-195. (in Chinese with English abstract)
[18] 白敬,徐友,魏新华,等. 基于光谱特性分析的冬油菜苗期田间杂草识别[J]. 农业工程学报,2013,29(20):128-134.
Bai Jing, Xu You, Wei Xinhua, et al. Weed identification from winter rape at seedling stage based on spectrum characteristics analysis[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(20): 128-134. (in Chinese with English abstract)
[19] 孙思成,付跃文. 脉冲涡流检测微弱信号调理电路设计[J]. 无损检测,2013,35(6):17-22.
Sun Sicheng, Fu Yuewen. Design of weak signal conditioning circuit for pulsed eddy current[J]. Nondestructive Testing, 2013, 35(6): 17-22. (in Chinese with English abstract)
[20] 李鑫星,王聪,李振波,等. 水体叶绿素a光学传感器信号调理电路设计与测试[J]. 农业机械学报,2015,46(9):314-318.
Li Xinxing, Wang Cong, Li Zhenbo, et al. Signal conditioning circuit design and test of chlorophyll a optical sensor of water[J]. Transaction of the Chinese Society for Agricultural Machinery, 2015, 46(9): 314-318. (in Chinese with English abstract)
[21] 赵亮,刘先勇,袁长迎,等. 微弱信号调理电路的设计及研究[J]. 西南科技大学学报,2010,25(1):64-68.
Zhao Liang, Liu Xianyong, Yuan Changying, et al. Design and study of weak signal conditioning circuit[J]. Journal of Southwest University of Science and Technology, 2010, 25(1): 64-68. (in Chinese with English abstract)
[22] Zrelli A, Bouyahi M, Ezzedine T. Monitoring of temperature in distributed optical sensor: Raman and Brillouin spectrum[J]. Optik-International Journal for Light and Electron Optics, 2016, 127(8): 4162-4166.
[23] 倪军,王婷婷,姚霞,等. 作物生长信息获取多光谱传感器设计与试验[J]. 农业机械学报,2013,44(5):207-212.
Ni Jun, Wang Tingting, Yao Xia, et al. Design and experiments of multi-spectral sensor for rice and wheat growth information[J]. Transaction of the Chinese Society for Agricultural Machinery, 2013, 44(5): 207-212. (in Chinese with English abstract)
[24] 李景镇. 光学手册[M]. 北京:兵器工业出版社,1985:168.
[25] 王婷婷. 多光谱作物生长智能传感器的研制[D]. 南京:南京农业大学,2012.
Wang Tingting. Development of Multi-Spectral Intelligent Sensor for Crop Growth[D]. Nanjing: Nanjing Agricultural University, 2012. (in Chinese with English abstract)
[26] 卢少林,倪军,曹卫星,等. 基于主动光源的作物生长信息监测仪的设计与试验[J]. 农业工程学报,2014,30(23):199-206.
Lu Shaolin, Ni Jun, Cao Weixing, et al. Design and experiment for crop growth information monitoring instrument based on active light source[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(23): 199-206. (in Chinese with English abstract)
[27] 蒋锟林. 一种传感器微弱信号放大电路的设计[J]. 电声技术,2013,37(11):25-28.
Jiang Kunlin. Design of a sensor weak signal amplifier circuit[J]. Audio Engineering, 2013, 37(11): 25-28. (in Chinese with English abstract)
[28] 赵明家. 东北春玉米冠层光谱特征与氮营养诊断依据的研究[D]. 长春:吉林农业大学,2014.
Zhao Mingjia. The Canopy Spectrum Characteristic of Northeast Spring Corn and Nitrogen Nutrition Diagnosis Research[D]. Changchun: Jilin Agricultural University, 2014. (in Chinese with English abstract)
[29] 刘海. 基于变分模型的红外光谱超分辨率方法研究[D]. 武汉:华中科技大学,2014.
Liu Hai. Research on Infrared Spectra Super-Resolution Based on Variational Models[D]. Wuhan: The Huazhong University of Science and Technology, 2014. (in Chinese with English abstract)
[30] 孙瑜. 基于光谱特性的玉米叶片水氮含量快速检测方法研究[D]. 西安:西北农林科技大学,2014.
Sun Yu. Methods Research of Corn Leaf Moisture Content and Nitrogen Detecting Based on Spectral Reflectance[D]. Xi’an: North West Agriculture and Forestry University, 2014. (in Chinese with English abstract)
[31] 焦学磊,曹卫星,田永超,等. 用于作物光谱信息监测的微弱信号调理方法与电路设计[J]. 仪器仪表学报,2008,29(11):2461-2464.
Jiao Xuelei, Cao Weixing, Tian Yongchao, et al. Feeble light signal conversion method and circuit design used in crop spectrum information inspection[J]. Chinese Journal of Scientific Instrument, 2008, 29(11): 2461-2464. (in Chinese with English abstract)
Design and application of spectrum sensor for weed detection used in winter rape field
Li Lin, Wei Xinhua, Mao Hanping, Wu Shu
(,,,212013,)
Due to lack of weed identification and positioning equipment,farmers usually use large area uniform spraying of chemical herbicides, which not only wastes herbicides and labor, but also leads to ecological environment pollution and agricultural product quality problem. At the same time, the weed control accuracy using existing mechanical weed control method is low with a high crop injury rate. Therefore, accurate weed identification is a key issue in target pesticide application and mechanical weed control. There are three kinds of weed identification method: image-based weed identification method, spectrum-based weed identification method, and spectral-image-based weed identification method. At present, spectrum sensor based on spectrum analysis has been most widely accepted in actual weed control due to its advantages of simple system configuration, lossless and high processing speed. Based on the four characteristic wavelengths (595, 710, 755 and 950 nm) selected by the investigation of weeds in the winter rape field, in this paper, we presented our research on weed spectrum sensor. According to the principle of optical system and the actual operation requirements in field, the structure design scheme of the spectrum sensor was proposed, which consisted of five parts, active light source, convex lens, light filter, photocell, and signal conditioning device. As the field measurement results vulnerable to weather conditions, we used LED as an active light source. There were four optical channels (595, 710, 755 and 950 nm) and three active LED light sources in the spectrum sensor. A K9 lenticular lens with diameter of 16 mm and focal length of 16 mm was chosen. A narrow-band interference filter with a center wavelength of 595, 710, 755, 950 nm was applied, whose half-peak bandwidth is 10 nm and aperture is 16 mm. The size of the photocell is 2.65 mm × 2.65 mm. The convex lens, the light filter and the photocell were sequentially arranged in the optical channels in order to detect the spectral information. Signal processing circuits were developed to meet the reliable output signal amplification, filtering and other requirements without distortion. The spectral distance of the spectral sensor is 400-700 mm while the diameter of the field of view is 60-100 mm. After that, the spectral sensor was applied to do calibration test and experimental verification. The calibration test established four mathematical models between the four output results by intelligent spectral sensor and the four measuring results of FieldSpec®3 spectrometer. The determination coefficients of each model were 0.799, 0.812, 0.892, and 0.867. The results of the experimental verification showed that most of the relative errors were within 10%, indicating that the designed sensor could separate winter rape from weeds. Therefore, the spectrum sensor could make its contribution to the exploration of weed automatic identification equipment. Experiments on actual weed identification showed that the average recognition rate was 90.7%, which had a good weed recognition effect. The main factors affecting the recognition results were the nature light and the mechanism vibration. How to reduce the influence of interference factors on the recognition precision will be the focus of the next research.
sensors; design; experiments; weeds identification; spectrum sensor; signal conditioning; optical system
10.11975/j.issn.1002-6819.2017.18.017
S237/TP73
A
1002-6819(2017)-18-0127-07
2017-04-11
2017-06-04
国家自然科学基金项目(51575244);江苏省高校自然科学研究项目(14KJA210001);公益性行业(农业)科研专项经费项目(201503130);江苏高校优势学科建设工程资助项目(2014-37);江苏大学高级人才基金资助项目(14JDG149)
李 林,女,助理研究员,主要从事智能化农业装备研究。镇江 江苏大学现代农业装备与技术教育部重点实验室,212013。Email:lilin@ujs.edu.cn
猜你喜欢
今日农业(2022年1期)2022-11-16
电脑迷(2022年10期)2022-11-08
现代电子技术(2022年18期)2022-09-17
农业工程学报(2022年5期)2022-06-22
农技服务(2021年6期)2021-09-22
科学技术创新(2021年25期)2021-09-11
锦绣·上旬刊(2020年3期)2020-06-08
中国医疗设备(2019年1期)2019-01-15
理科考试研究·初中(2018年10期)2018-12-11
艺海(2018年3期)2018-05-17
