高精度激光动态测试技术初探
2017-11-01 07:39邓江流
电子测试 2017年19期
邓江流
(贵阳职业技术学院,贵州贵阳,550081)
高精度激光动态测试技术初探
邓江流
(贵阳职业技术学院,贵州贵阳,550081)
激光测距仪在研究过程中,主要是通过地面检测方法对测距仪的性能指标等加以测试研究,在整个工作过程中也是重要的工作内容。根据激光测距仪的基本工作原理,再设计出高精度激光动态测试系统,综合分析影响高精度的误差因素等,最终能够实现对激光测距仪的精度测量。相比起传统测试方法而言,激光测距仪具有以下两种特点:其一,精度高;其二,模拟距离动态的范围比较大。研究结果表明,高精度激光动态测试系统距离范围能够达到16m~28km,模拟精度超过0.16m。高精度激光动态测试系统在操作过程中既简单又方便,除此之外,具有比较强的实用性。高精度激光动态测试系统能够满足现阶段各种激光测距仪的基本需求。
激光测距仪;高精度;激光动态;测试系统
0 引言
对激光测距仪进行性能测试的过程中,需要输入高精度且可以调节的仿真距离测试值。研究分析高精度激光动态测试系统的地面距离模拟源技术进行深入研究,能够实现长度可实时输入的延时处理[1-2]。从模拟激光测距仪到激光发射到激光回波之间的时间间隔不难发现,能够综合分析出模拟精度的误差,最后通过高精度激光动态测试系统进行实际模拟精度的测量,能够验证模拟元所提供的绝对精度值。激光测距仪具有以下几个方面的特点:其一,准直性强;其二,相干性好;其三,单色性好。激光测距仪能够精确测量被测物体和测距仪之间的距离,随着近年来科学技术的不断发展以及人类对于宇宙世界的追求,激光测距仪已经越来越得到政府机构和航天机构的关注和重视[3-4]。除此之外,激光测距仪在册立精度和范围方面有着长远的进步。根据激光测距仪的基本精度要求,不难看出,在激光测距仪的研究过程中,需要采用相应的地面测试方法来对各项测距仪的技术指标进行充分的测验研究。基于此,只有不断研制出高精度且高稳定性的测试设备,才能够在室内对激光测距仪进行充分且快捷的评估和测试,上述研究点显得尤为重要。目前来看,较为典型的激光测距方法有以下几种:其一,干涉方法;其二,脉冲方法;其三,相位方法。脉冲式激光侧距离方法由于具有功能消耗低、结构简单和测距范围比较大等特点,最终得到广泛应用。本文将结合脉冲式激光测距离方法的基本原理,再结合现有的地面测试方法提出了光电延时阀的高精度激光动态测试技术,研制出高精度激光动态测试系统,对系统的误差加以分析和最终的实验验证。
1 脉冲激光系统的基本组成
1.1 距离模拟源组成结构
使用PIN光电探测器所组成的探测电路,将激光测距仪所发出的激光作为主波,将其作为主控单元开始延时的信号[5-6]。高精度延时能够通过模拟插入法来高效率的实现,系统在实现过程中,由于受到电压和温度的营销 ,所以在主控单元进行选择时要按照同步时钟的计数方式进行延时处理。延时结束时,主控激光回波触发信号,激光测距仪此时详细记录好发送主波到接收回波之间的时间,最终得出具体的距离数据。
1.2 系统硬件的基本组成
距离模拟元的基本硬件组成主要包括以下几种:其一,激光主波接收;其二,鉴别单元;其三,激光回波发射单元;其四,主控单元。在激光主波接收单元和鉴别单元中, 通过单级电压放大电路信号,再经过告诉比较电路输出,再放大电路宽带移机信噪比。在激光回波发射单元中,通过距离模拟源使用激光二极管,将接收系统的回波发送到二极管中,通过高速器件瞬时导通大电流脉冲之中,驱动激光二极管。通过调整储能电容的数值能够积极改变电容的整体放电时间,达到距离模拟源发射出的买中峰值。在主控单元中 ,为了减小时间量化误差,不断提高计时分辨率,使用内部锁相环进行振荡器的时钟计算。主控单元通过通信和总线对延时长度加以设定 ,再积极调整好距离值。
2 基本工作原理
2.1 脉冲式激光测距仪的基本工作原理
脉冲式激光测距仪在测量距离的过程中主要是通过激光束和被测物体之间的往返时间,最终能够确定好具体的距离。在激光测距仪T0时刻中发出一束激光脉冲,再经过目标反射在T1时刻将被测距仪的接受望远镜所接受,探测时间T=T1-T0。脉冲式激光测距仪的总距离(R)等于T乘以关在真空中的传播速率除以2.T为时间间隔,见图1.
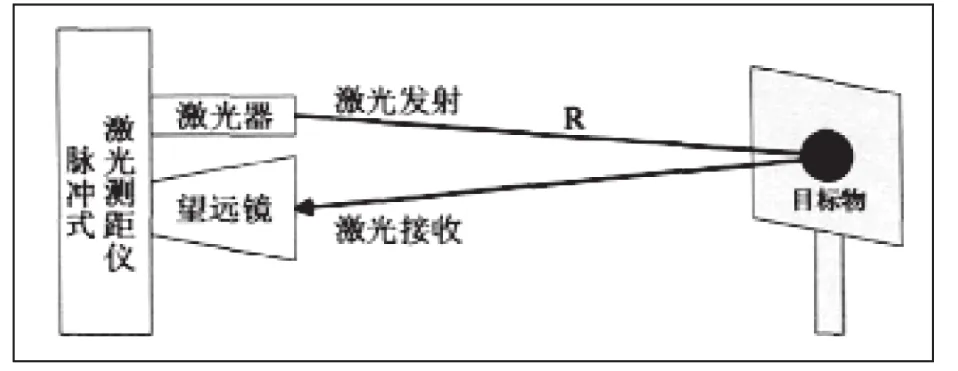
图1 脉冲式激光测距仪的工作原理图
2.2 动态距离模拟器的基本工作原理
使用动态距离模拟器对脉冲式激光测距仪加以测试,从总体而言,就是采用动态距离模拟器将所发出的激光冲脉延迟一段时间之后,再输出激光脉冲,将其作为测距仪的接收望远镜。通过比较测距仪所测得的距离值以及动态距离模拟器之间的设定值,便于及时测量激光仪的具体精度。
3 动态距离模拟器的基本系统设计
动态距离模拟器一般由以下几个单元组合而成:其一,时间延迟单元;其二,激光接收单元;其三,激光发射单元;其四,激光控制单元。激光测距仪发射的激光脉冲,通过光学系统的输入,再由激光接收单元的探测器加以测得,再通过光电探测器输出的信号形成完整的脉冲信号,从出发时间的延时单元加以计时处理。在时间延迟单元中,通过控制好单元调节情况和控制情况。当延迟时间达到设定值时,从时间延迟单元之中出发激光发射单元的激光,激光器所输出的激光将作为回波信号而被脉冲式激光测距仪的望远镜所接收。在激光接收单元中,由以下几个部分组合而成:其一,PIN管探测器;其二,阈值比较电路;其三,恒比定时电路;其四,脉冲输出电路。PIN管探测器选用美国公司生产的HKG874型光电探测器,响应时间小于2ns,波长范围在210nm~1080nm。上述探测器的灵敏度比较高,阈值电路以及恒必定时电路有MII9699 型告诉比较器和 MC528 型差分D触发器组构而成。 此类高速比较器电路的传输延迟时间为:600ps;输出抖动为:350fs。脉冲输出电路采用的电平转换器为数字脉冲信号,输出的数字脉冲上升时间为:1ns,继而保证好电路的快速性能。在时间延迟单元中,为了提高延迟时间的稳定性和精度性,可以选用高精度的数字脉冲触发器,具体参数表现如下:其一,具有4个或者4个以上的触发通道;其二,具有最大化的延时量程;其三,分辨率为1ps。从激光发射单元中,其主要作用是受到时间延迟单元所输出的一束激光,再作为回波信号返回到激光测距仪的望远镜之中。激光发生单元所选用的光纤脉冲激光器为深圳某公司生产,型号为JYIGJKKLHJ-1255-15-025-5型。上述激光器采用低电压供电 ,通过BNC接口直接出发,使用过程非常方便且能够集中在系统之中。从延迟控制单元中,其主要作用是用于设定模拟距离,实时显示出具体的距离信息,从而能够存储实验数据。采用LABVIEW程序编写在控制界面之中,通过计算机控制实现对时间延迟单元的设定 ,积极完成模拟距离的校正。
4 高精度激光动态测试技术和实验
4.1 分析误差
距离模拟元的误差来源,将系统误差和随机误差加以分析计算,不难发现,根据系统设计的方法和使用的器件等能够加以性能参数设计,再对各个误差的来源进行理论误差分析。在系统误差的分析中,需要在一定测量条件之下,对一个被测量数值加以重复检测,误差值的大小和误差值的符号保持高度不变。系统误差不仅仅会影响到标准时间值的绝对精度,再通过标定加以消除。在主要系统误差中,将其分为系统固定延迟误差和固定阈值鉴别误差。
4.2 精度测试
动态距离模拟器的精度主要用于模拟距离值的稳定性和准确性,受到以下几个因素的影响:其一,激光接收单元输出秒冲的抖动信号;其二,时间延迟单元输出信号;其三,延迟脉冲的抖动;其四,激光发生单元时间的抖动。动态距离模拟器输出的脉冲时间抖动由各个系统输出脉冲的时间抖动所引起,根据实测数据可得知,激光接收单元的输出脉动抖动数值为:150ps;信号延迟单元输出脉动抖动数值为:50ps;激光发射单元出的光时间抖动为:200ps。
4.3 实验方法
在系统实验方法中,将模拟距离分别设定为:22米、45米、90米、180米、400米、800米、1800米、3500米、9000米、20000米、30000米,将每一个设定距离分别测量100次。实测距离均值为:21.99米、44.98米、89.99米、179.96米、399.95米、799.96米、1799.98米、3499.88米、8999.96米、20000.02米、30000.01米.标准差为:0.016、0.017、0.018、0.015、0.019、0.017、0.016、0.018、0.019、0.022、0.018.
5 结束语
高精度激光动态检测系统的研究会在很大程度上改善脉冲式激光测距仪的测试标准方法,从几十米到几万米的距离上测量激光测距仪的精度,具有比较高的测试精度,与此同时还能够充分满足比较高的测试精度要求,与此同时能够满足不同程度的激光测距仪测试基本需求。从实验研究结果不难看出,高精度激光动态检测系统具有良好的稳定性,操作界面非常友好且操作简单。除此之外,高精度激光动态检测系统不会受到天气和场地等条件的影响,因此具有广阔的应用前景。
[1]叶道焕,黄庚华,程鹏飞等.高精度激光动态测试技术研究[J].红外,2016,37(5):7-9,16.
[2]李艳晓,张磊,张红刚等.基于双CCD探测的外场高精度激光光斑测试技术[J].红外与激光工程,2015,14(1):59-64.
[3]岳玉芳,张飞舟,张玉双等.激光动态光束定向系统的跟踪识别过程仿真[J].强激光与粒子束,2008,20(8):1270-1274.
[4]樊玉铭,张国雄,高翔等.基于时间差法主动调焦式激光测头的研究[J].中国激光,2005,32(4):514-518.
[5]安颖,杜振辉,刘景旺等.激光自外差相干测量中分布反馈半导体激光器电流调谐非线性的补偿方法[J].物理学报,2012,61(3):183-188.
[6]齐永岳,赵美蓉,林玉池等.高精度激光干涉条纹细分系统[J].传感器与微系统,2006,25(8):43-45,48.
[7]刘耀英,薛晨阳,郑华等.高精度环形谐振腔的结构设计及优化[J].红外与激光工程,2014,14(11):3688-3693.
Research on high precision laser dynamic testing technology
Deng Jiangliu
(Career Technical College,Guiyang Guizhou,550081)
Laser rangefinder in the course of the study, the main research is to test the ground detection method of range finder performance indicators, in the whole process of the work is also an important content of the work According to the basic principle of the laser range finder, and then design a high precision laser dynamic testing system, a comprehensive analysis of the impact of high precision the error factors, can achieve the precision measurement of laser rangefinder Compared with the traditional test method, laser rangefinder has the following two characteristics: first, the precision is high; second,the range of distance is relatively large The dynamic simulation results show that the dynamic range of high precision laser testing system can reach 16m~28km the simulation accuracy of more than 0.16m. high precision laser dynamic testing system in the operation process is simple and convenient, in addition, has a relatively strong practical dynamic high precision laser The test system can meet the basic needs of various laser range finders at the present stage
laser range finder; high precision; laser dynamics; test system
猜你喜欢
数学物理学报(2022年3期)2022-05-25
数学物理学报(2019年5期)2019-11-29
测控技术(2018年12期)2018-11-25
中成药(2017年12期)2018-01-19
北京航空航天大学学报(2017年9期)2017-12-18
价值工程(2017年8期)2017-03-25
卷宗(2017年1期)2017-03-17
光学精密工程(2016年3期)2016-11-07
科技视界(2016年16期)2016-06-29
测绘科学与工程(2016年6期)2016-04-17