
基于拉索的航天器挠性部件在轨增频技术研究
2017-11-06 07:40薛景赛王智磊赵枝凯杜三虎
航天器环境工程 2017年5期
薛景赛,王智磊,赵枝凯,杜三虎
(上海卫星工程研究所,上海 201109)
基于拉索的航天器挠性部件在轨增频技术研究
薛景赛,王智磊,赵枝凯,杜三虎
(上海卫星工程研究所,上海 201109)
航天器上的太阳电池阵等挠性部件基频较低、低频模态密集,可能会与器上活动部件产生耦合和共振,对航天器姿态及载荷工作等产生不良影响。针对此问题,文章提出用主动张紧拉索装置来调节挠性部件的频率。在调研国内外技术的基础上,分析了悬臂梁模型中支撑刚度对系统模态的影响,建立拉索增频的动力学模型并进行仿真;依据原理性试验仿真结果,设计了器上增频机构,并完成了相关地面试验验证和在轨飞行验证。本研究对于航天器挠性部件的增频和错频等技术措施的实施具有参考价值。
航天器;挠性部件;增频;张紧拉索;拉索模型
0 引言
大型航天器低刚度挠性部件或者半刚性部件基频较低,低频模态密集现象比较明显,易与陀螺、飞轮等活动部件的运动产生共振和耦合现象[1],使航天器平台的稳定运行状态受到破坏,轻则对航天器姿态产生干扰,重则导致载荷的工作不正常[2-4]。因此,必须根据实际的使用情况,采用有效的手段,对挠性部件的频率进行一定范围的改变,使得其固有频率与器上活动部件频率错开。
针对某卫星太阳电池阵的频率调整需求,本文调研国内外研究进展,进行了建模、仿真分析和原理验证试验,并在此基础上设计主动张紧拉索的装置。若在轨发生耦合振动,则可通过拉索主动调整,对挠性部件施加一定的外力和约束,以改变太阳电池阵自身的频率特性,从而达到错频设计、抑制耦合振动的目的。
1 国内外研究现状
1.1 拉索在航天器上的应用
在桥梁建筑领域,链结构或拉索结构常被作为结构调节手段用于振动控制[5-6]。随着航天技术的发展,拉索结构也被用于航天结构振动控制及刚度调节。
图 1为国外 FAST卫星上磁强计的展开示意图:用拉索连接磁强计展开杆的中部,在磁强计展开过程中,拉索处于随动状态,对展开功能无影响;而在磁强计展开到位锁定后,当星上活动部件工作与磁强计存在耦合振动时,控制拉索张紧,可在一定范围内调节展开式磁强计的频率特性,保证星体姿态的稳定。
Murotsu等[7-8]于1989年将拉索使用到航天器半刚性振动控制中,并通过理论推导和实验验证了所提出方案的可行性和有效性[9]。该方案以力控制器和拉索组成调节系统作用在悬臂梁构件上(如图2所示),调节系统的一端安装在航天器本体上(刚体),另一端安装在柔性梁需要进行振动控制的部位,并用传感器对调节进行监控。
Preumont等[10-12]在卫星展开桁架的末端之间布局了 3套主动拉索控制系统(见图 3),每套包括1台拉索张紧控制装置和1个力传感器。
1.2 具有辅助支撑的悬臂梁数学模型
张紧拉索相当于在挠性部件上附加单边约束,可提高系统刚度。对于单边约束的问题,可以借鉴具有双边弹性约束的悬臂梁弯曲的研究方法[13]。图 4所示为具有弹性约束的悬臂梁模型,梁的长度为L,一端固支,另一端为弹性约束,弹性约束元件的支撑刚度为K1。
设梁材料的弹性模量为E,材料密度为ρ,梁截面惯性矩为I,则梁的弯曲振动方程为
其对应的振型y(x)可由Y(x,t)=y(x)T(t)推导得到,即
式中,k为梁的振动特征值,k=(ω2ρA/EI)1/4。
该梁的边界条件为
将式(2)代入式(3),则得
在系数矩阵的行列式为0,即满足
的情况下,c1和c2才能有解。由式(5)可知:当弹性约束支撑刚度K1=0时,梁模型变为悬臂梁;当K1→∞时,梁模型就变为一端固定、一端铰支。
设定L=2 m、E=184 GPa等具体参数,梁的一阶和二阶振动特征值计算结果如图5所示。
2 拉索增频仿真分析及验证
拉索对挠性部件频率的改变主要体现在 2个方面[14]:一方面张紧拉索增加了对挠性部件在拉索方向的单向约束;另一方面拉索上的力对挠性部件起到消除间隙、增加刚度的作用。仿真模型主要是研究前者对系统模态的影响,验证拉索刚度和作用点位置等参数对系统频率的改变,这2个要素也是增频机构的重要参数。
拉索结构只能承受拉力,在扭转、弯曲、压缩等方向上无刚度,因此拉索结构特性具有较强的非线性。本文在仿真中使用某卫星及其太阳电池阵的参数和有限元模型,主要对张紧后的拉索进行建模,使其具备单向拉伸刚度。
2.1 ADAMS仿真
星体为由 Pro/E导入的刚体模型,太阳电池阵为有限元建立的柔性体模型,采用刚柔混合建模,在星体和太阳电池阵之间建立弹性元件代表具有一定刚度的拉索,施加的位置为第 2块电池板接近星体的位置,其模型如图6所示。由于重点关注太阳电池阵的第一阶模态与星上活动部件的耦合,所以后续仿真与分析重点关注太阳电池阵基频的变化。
在弹性元件刚度不变的情况下,在拉索上施加4档不同的预紧力,其对太阳电池阵频率改变的结果如表1所示。可知在刚度不变时,拉索上的预紧力在10 N范围内变化时,对频率的影响很小,变化幅度在1%以内。
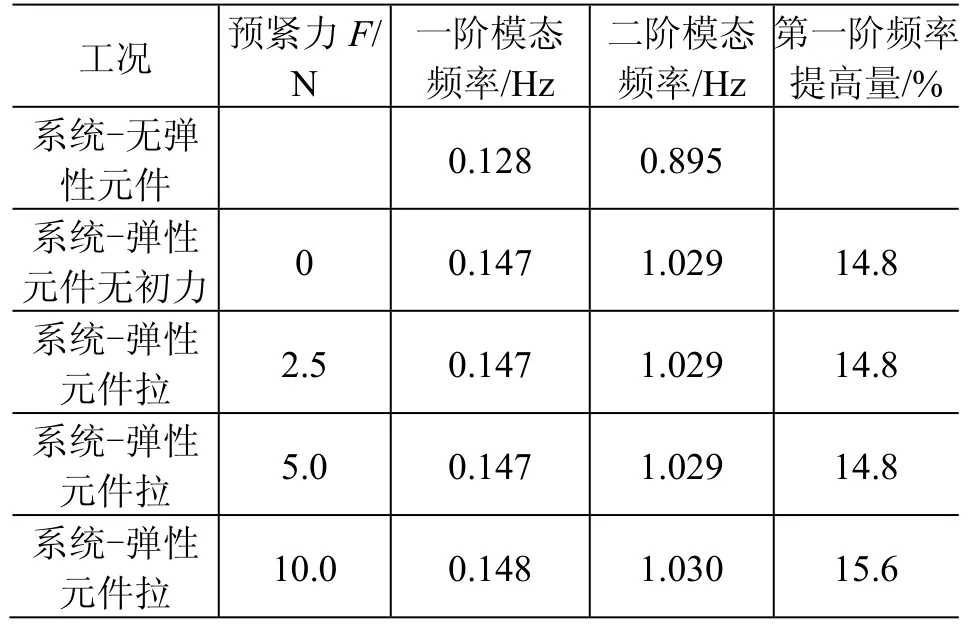
表1 拉索上预紧力变化对太阳电池阵模态的影响(K=1000 N/m)Table 1 Influence of pulling force of tension cable on solar array’s modes (K=1000 N/m)
固定预紧力为 10 N,改变弹性元件的刚度,分析其对太阳电池阵频率的改变,见表2。可知与预紧力相比,拉索刚度对太阳电池阵的模态影响更大。

表2 拉索刚度变化对太阳电池阵模态的影响(F=5.0 N)Table 2 Influence of cable stiffness on solar array’s modes(F=5.0 N)
修改ADAMS模型,变弹性元件拉力为星体对太阳电池阵的力,取消刚度的约束,单独考核力的影响,结果如表3所示。可知力值在10~20 N间变化时,对太阳电池阵的模态影响很小,变化在1%以下。
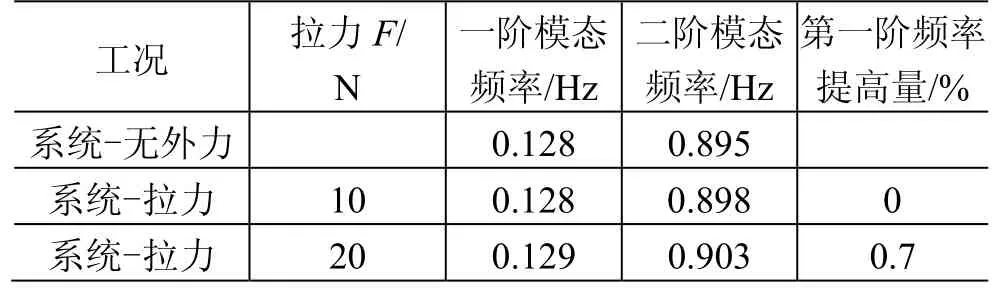
表3 单纯力的作用对太阳电池阵模态的影响Table 3 Influence of force on solar array’s modes
2.2 Nastran有限元模型
按照Pro/E建模的情况,在太阳电池阵第1块电池板远离星体的一侧施加梁单元,分析其对电池阵频率的影响,建立有限元模型。参数与ADAMS仿真完全相同,最终模态的变化幅度也是基本一致的。根据仿真结果可知,预紧拉力的大小对电池阵频率的影响不大,而拉索刚度为电池阵频率主要影响因素:拉索刚度增大时,电池阵的频率增大。
2.3 仿真结论
综合以上ADAMS及有限元模型的分析结果,可得到以下结论:
1)拉索刚度对太阳电池阵频率的影响最大,拉索刚度越大,则电池阵的频率增量越大;
2)在小范围变化时,预紧拉力对频率改变的影响可忽略不计。
2.4 验证试验及结论
为了验证仿真分析的结论,并为正样设计提供参数,根据设计加工了太阳电池阵的展开式构件(如图7所示)。不采用任何增频措施,测量基板-铰链条件下,展开式构件自身的频率为5.9 Hz。从拉索的刚度、拉力、角度及位置这4方面因素分析其对展开式构件频率的影响。
试验选用了4种不同刚度的星上常用拉索,分别为:高刚度拉索(0.6 mm钢丝绳)、中等刚度拉索(凯芙拉线)、低刚度拉索(星上电缆绑扎带)以及零刚度拉索(普通橡皮筋);试验中分别在拉索上施加5 N和10 N的力进行试验对比。对除橡皮筋以外的其他3种拉索,截取相同长度进行刚度测试,结果依次为:42、10.7及4.4 N/mm。
工况I如图8所示,拉索安装点为展开式构件的第2块板下部远离安装支架上的点,拉索与平板的夹角为90°,拉索的长度设定在1000 mm左右。
工况I的测量结果如表4所示。可以看出,拉索刚度越大,构件频率测量值的增加量也越大;拉索上拉力的变化对频率的影响不大。

表4 工况I结果Table 4 The results of working condition I
工况II如图9所示,拉索为中等刚度拉索,安装点位置不变,预紧拉力为 10 N,图 9(a)~(d)中拉索与构件平板的夹角分别为 90°、45°、15°、0°,拉索的长度设定在1000 mm左右。
工况II的测量结果如表5所示:随着拉索与平板夹角的变小,构件频率也逐渐降低。由于展开试验构件的第一阶为弯曲模态,拉索在板面法向的刚度对频率影响最大(拉索与平板夹角为0°时,基频无变化可证明拉索分配到面内的刚度对频率无影响),工况II的拉索与平板夹角的变化也表明拉索刚度与展开构件的正相关性。

表5 工况II结果Table 5 The results of working condition II
综合以上2个工况的分析结果,可知试验与仿真的结果一致,拉索刚度为改变构件频率的关键因素,拉索上的力基本不会影响构件的频率。因此,进行增频机构设计时应注意:
1)选用高刚度拉索(钢丝绳为优先的选择);
2)虽然拉索上的拉力不是调整频率的关键因素,但是在实际工程设计中应尽量降低拉索的预紧拉力,保证太阳电池阵等挠性部件的安全性。
3 增频机构设计
针对某卫星挠性部件与星上活动部件间存在振动耦合的情况,设计拉索增频机构装置。该装置的主结构安装在卫星本体上,接口支架连接在挠性部件上。根据仿真和试验的结果以及卫星上使用要求,增频机构必须具有以下特点:
1)拉索具有高刚度:高刚度拉索能保证增频的效果;
2)张紧保持功能:在张紧起到增频效果后,增频机构需要保持锁定以维持拉索的张紧状态;
3)拉索上力控制:为保证卫星安全和可靠性,拉索上的力要求不过大或者能够感知其大小即可;
4)对挠性部件的展开无影响:拉索装置连接星体和挠性部件,应对挠性部件的在轨展开无影响。
根据以上具体要求对增频机构进行设计,其外形及基本的工作原理分别如图10和图11所示。
增频机构选用的拉索为钢丝绳,具有高强度、高模量、低密度的特点,能满足增频机构对拉索刚度、强度、韧性和空间环境使用的要求;驱动元件为步进电机,使用脉冲信号进行开环控制,方法简单,重量较轻,在卫星上使用较为成熟;角位置传感器和限位传感器可以感知拉索上的拉力,保证拉力不会过大。最终设计的机构,拉索末端的实测刚度为2000 N/mm。
4 星上试验结果
为验证设计的效果,让增频机构参与卫星太阳电池阵的模态试验及相关测试,如图12所示。用FFT分析方法对比增频前后的模态数据(如图13、图14所示),可知增频后太阳电池阵的前3阶模态均有所提高。由具体的改变量数据(如表6所示)可知,增频机构对弯曲模态的提高更为明显,太阳电池阵的第二阶频率可提高约20%。这与ADAMS等仿真结果是一致的,说明增频达到了设计目的。
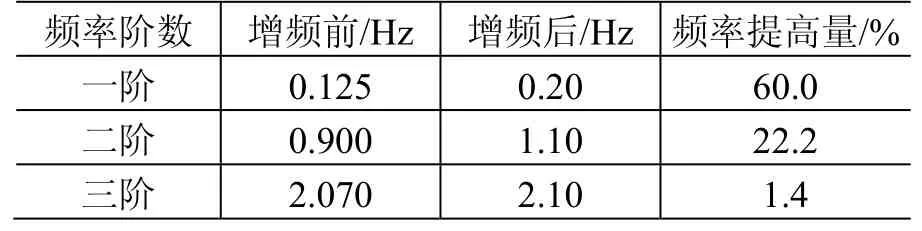
表6 太阳电池阵和增频机构模态试验结果Table 6 The modal test result of the solar array with the frequency adjustment mechanism
5 在轨飞行试验结果
卫星在轨稳定运行后,针对增频机构进行拉索张紧及松开的试验,以陀螺测量的卫星偏航角速度(采样频率为0.5 s)作为判读依据。其中星上某大型活动部件转动的频率为0.3 Hz,太阳电池阵在轨展开状态下的初始(增频机构钢丝绳未张紧)实测基频为0.25 Hz。
观察增频前后的全段数据(图15),明显看到卫星偏航角速度数据可分为6段:0~135 s为增频机构拉索张紧前平稳状态;135~155 s为拉索张紧后的星体的振荡过程;155~353 s为增频机构拉索张紧后的平稳段;353~405 s为增频机构拉索放松后的振荡过程;405 s后为增频机构拉索松开后的平稳段。
放大观察增频机构拉索张紧和松开后的数据(图 16和图 17),可知增频机构将太阳电池阵的频率从0.24 Hz提高到预张紧状态下的0.3 Hz。在增频后,发生耦合(0.3 Hz对应的振幅比增频前要大,可知此部分除了星上某大型活动部件转动频率引起的部分外,还有太阳电池阵频率提高到0.3 Hz所叠加引起的)。
6 结束语
本文针对卫星上挠性部件与活动部件产生耦合和共振的问题,提出了用主动张紧拉索的装置调节挠性部件的频率。在调研国内外技术的基础上,建立拉索增频的动力学模型,进行仿真和原理性验证试验,并以此为依据设计制作了增频机构样机。地面验证和在轨试验均表明增频机构的频率调节效果良好,与仿真结果一致。
(
)
[1] 孟光, 周徐斌. 卫星微振动及控制技术进展[J]. 航空学报, 2015, 36(8): 2609-2619 MENG G, ZHOU X B. Progress review of satellite micro-vibration and control[J]. Acta Aeronautica ET Astronautica Sinica, 2015, 36(8): 2609-2619
[2] FOSTER C L, TINKER M L, NURRE G S, et al.Solar-array-induced disturbance of the Hubble space telescope pointing system[J]. Journal of Spacecraft and Rockets,1995, 32(4): 634-644
[3] THORNTON E A, KIM Y A. Thermally induced bending vibrations of a flexible rolled-up solar array[J].Journal of Spacecraft and Rockets, 1993, 30(4): 438-448
[4] THORNTON E A, KIM Y A. Thermally induced bending vibrations of a flexible rolled-up solar array[C]//34thAIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, and AIAA/ASME Adaptive Structures Forum. La Jolla, CA, 1993:2138-2150
[5] YANG J N, GIANNOPOLOUS F. Active control and stability of cable-stayed bridge[J]. ASCE J Eng Mech Div, 1979, 105(4): 677-694
[6] YANG J N, GIANNOPOLOUS F. Active control of two-cable-stayed bridge[J]. ASCE J Eng Mech Div,1979, 105(5): 795-810
[7] MUROTSU Y, OKUBO H, TERUI F. Low-authority control of large space structures by using a tendon control system[J]. Journal of Guidance, Control, and Dynamics, 1989, 12(2): 264-272
[8] MUROTSU Y, OKUBO H, SENDA K. Identification of a tendon control system for flexible space structures[J].Journal of Guidance, Control, and Dynamics,1991,14(4): 743-750
[9] 郭铁能. 空间柔性结构振动拉索控制[D]. 北京: 清华大学, 2007: 6-9
[10] PREUMONT A, ACHKIRE Y. Active damping of structures with guy cables[J]. Journal of Guidance,Control, and Dynamics, 1997, 20(2): 320-326
[11] PREUMONT A, BOSSENS F. Active tendon control of vibration of truss structures: theory and experiments[J].Journal of Intelligent Material Systems and Structures,2000, 11(2): 91-99
[12] PREUMONT A, ACHKIRE Y, BOSSENS F. Active tendon control of large trusses[C]//39thAIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics &Materials Conference and Exhibit, and AIAA/ASME/AHS Adaptive Structures Forum. Long Beach, CA, 1998:850-855
[13] 巨维博, 顾致平, 苟兵旺. 支承刚度对输流管道振动特性的影响分析[J]. 西安工业大学学报, 2011(7): 616-617 JU W B, GU Z P, GOU B W. Influence of support stiffness on vibration characteristic of a pipe conveying fluid[J]. Journal of Xi’an Technological University,2011(7): 616-617
[14] ACHKIRE Y, PREUMONT A. Active tendon control of cable-stayed bridges[J]. Earthquake Engineering &Structural Dynamics, 1996, 25(6): 585-597
Frequency-increasing technology of spacecraft flexible attachment based on tension cable system
XUE Jingsai, WANG Zhilei, ZHAO Zhikai, DU Sanhu
(Shanghai Institute of Satellite Engineering, Shanghai 201109, China)
The flexible appendages feature a relatively low fundamental natural frequency and closely distributed low-frequency coupling modes, so for a satellite with flexible appendages and moving parts, the frequency coupling and the resonance might be an issue to affect the attitude of the satellite. To solve this problem, a method is proposed in this paper to regulate the natural frequency of the flexible appendages. Firstly,the relevant domestic and foreign studies are reviewed. Then simplified model of a spring with unidirectional stiffness on a simple beam is established, and the effect of the brace stiffness on the system modes is analyzed. A dynamical model of the active tension cable and the flexible appendages is built for simulations, to test the influence of the stiffness of cable on the system modes, and to obtain the force on and the best position of the cable. At last, the complete device is designed, with validation by ground test and flight experiment.
spacecraft; flexible appendages; increase of natural frequency; tension cable; cable model
V414
A
1673-1379(2017)05-0457-07
10.3969/j.issn.1673-1379.2017.05.001
2017-05-10;
2017-09-18
国家自然科学基金资助项目(编号:51505294)
薛景赛, 王智磊, 赵枝凯,等. 基于拉索的航天器挠性部件在轨增频技术研究[J]. 航天器环境工程, 2017, 34(5):457-463
XUE J S, WANG Z L, ZHAO Z K, et al. Frequency-increasing technology of spacecraft flexible attachment based on tension cable system[J]. Spacecraft Environment Engineering, 2017, 34(5): 457-463
(编辑:张艳艳)
薛景赛(1985—),男,硕士学位,从事卫星结构与机构设计。E-mail:xuejingsai@126.com。
猜你喜欢
印制电路信息(2022年8期)2022-09-21
科学技术创新(2022年18期)2022-06-24
城市道桥与防洪(2022年1期)2022-02-25
太阳能(2021年10期)2021-11-03
北京航空航天大学学报(2021年7期)2021-08-13
上海航天(2020年3期)2020-07-01
华北水利水电大学学报(自然科学版)(2020年1期)2020-03-20
装备环境工程(2018年7期)2018-08-01
舰船科学技术(2018年5期)2018-06-01
航天制造技术(2017年5期)2017-11-24
