
基于复合控制电流的开关磁阻电机恒转矩控制*
2017-11-07 01:50党选举张堡森伍锡如
组合机床与自动化加工技术 2017年10期
党选举,张堡森,姜 辉,伍锡如,李 珊
(桂林电子科技大学 a.电子工程与自动化学院;b.教学实践部 国家级电子电路实验教学示范中心,广西 桂林 541004)
1001-2265(2017)10-0077-05
10.13462/j.cnki.mmtamt.2017.10.019
2016-11-17;
2016-12-09
国家自然科学基金项目(61263013,61603107);广西信息科学实验中心项目(20130110);广西自然科学基金(2016GXNSFDA380001,2015GXNSFAA139297)
党选举(1965—),男,陕西咸阳人,桂林电子科技大学教授,博士生导师,博士,研究方向为非线性系统建模与控制,精密智能机电测控系统,(E-mail)xjd69@163.com;通讯作者:张堡森(1991—),男,福建漳州人,桂林电子科技大学硕士研究生,研究方向为开关磁阻电机控制,(E-mail)zhang_baosen@126.com。
基于复合控制电流的开关磁阻电机恒转矩控制*
党选举a,张堡森a,姜 辉a,伍锡如a,李 珊b
(桂林电子科技大学 a.电子工程与自动化学院;b.教学实践部 国家级电子电路实验教学示范中心,广西 桂林 541004)
开关磁阻电机(SRM)在低速运行时,高转矩脉动极大限制了在生产中的应用。针对基于线性电感模型转矩分配函数(TSF)控制得到的线性控制电流,难以有效控制强非线性特性SRM,所导致的转矩脉动较大的问题,文章提出基于回声状态网络(ESN)的电流控制策略,针对SRM非线性特性,设计实时得到由动态电感引起的非线性部分电流的控制器,其输出与TSF控制器的线性控制电流叠加得到复合控制电流,两个电流控制共同作用,提高系统动态性能,有效抑制转矩脉动。仿真结果验证了所提出的控制策略可以有效减小电机的转矩脉动。
开关磁阻电机;转矩脉动;动态电感;回声状态网络
0 引言
开关磁阻电机因其坚固可靠、无需稀土材料以及调速灵活等优点,成为可变速驱动系统中的新型首选电机。但是,SRM具有特殊的双凸极结构以及采取开关式的供电方式,磁路呈强非线性和饱和性,决定了电机运转时存在转矩脉动、噪声、振动等缺点,尤其在低速区转矩波动更为强烈,直接影响了其在运行质量要求较高场合的应用[1]。因此研究抑制SRM转矩脉动的方法成为研究热点。
国内外学者从改进电机控制策略方面进行抑制SRM转矩脉动研究取得了许多研究成果[2-3]。在解决非线性系统的控制问题上,智能控制方法相较于传统的控制方法具有突出优势,尤其是神经网络,具有在线学习的自适应能力,能够无限逼近任意非线性函数。为此许多国内外学者将神经网络应用于SRM控制策略中[4-7]。在文献[4]中,模糊神经网络与直接转矩控制(DTC)策略结合,设计了混合模糊神经网络控制器,实现对转矩和磁链的控制,该方法在一定程度上有效地抑制转矩脉动;文献[5],利用神经网络设计了非线性转矩-电流转换器,将分配的各相参考转矩转换为控制电流,该策略取得较理想的输出转矩,但其使用经典的BP(back propagation)神经网络算法,收敛速度慢;文献[6]中,设计了无传感器自适应参考模型控制系统,该方法利用神经网络建立SRM的参考模型,通过参考模型的转矩、转速、位置角信号反馈实现自适应控制;文献[7],设计了离线训练的电流最优神经网络控制器,优化开关角及控制电流三个参数,实现转矩脉动抑制。已有的神经网络控制方法,大多数是把SRM的线性和非线性特性视为整体进行复杂的控制方法设计。
该文采用文献[8]所描述的SRM动、静态电感模型,结合智能控制方法,针对SRM非线性特性,设计了基于ESN的非线性电流控制器,其输出与TSF线性控制电流叠加得到复合控制电流,有效地抑制转矩脉动。该方法将SRM特性划分为线性及非线性特性部分,针对非线性特性的进行电流控制器的设计,理论依据强,转矩脉动抑制效果好。
1 SRM的非线性电感特性及模型
SRM电感模型可由动态电感Ld,k与静态电感Ls,k叠加。SRM第k相的电压平衡方程可表示为[8]:

(1)
式中,Us为电源电压,ik为第k相电流,Rk为第k相电阻,Ut为开关管导通压降,Ls,k为第k相的静态电感,角速度ω=dθ/dt。第二项为由电机转速引起的运动电动势。
式(1)中,第三项表示由电流引起的感应电动势,可得动态电感为:

(2)
动态电感与电流变化Δi息息相关,由文献[8],仅考虑第k相转子处于某一固定位置时,动态电感可进一步表示为与二次Δi相关的函数:

(3)
式中,ΔB、ΔH为Δi引起的磁感应强度与磁场强度的变化量,体现动态电感在电流变化时的强非线性。
静态电感Ls,k忽略磁饱和及边缘效应,主要与位置角θ相关,通常采用理想的简化线性模型;动态电感Ld,k随电流变化而变化。静态电感曲线与动态电感曲线如图1所示。
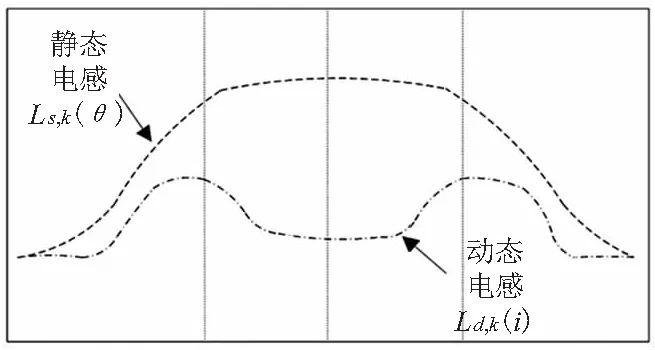
图1 SRM动、静态电感曲线
由SRM的动、静态电感模型,该文分别对线性静态电感、非线性动态电感进行线性电流控制器和非线性电流控制器的设计,再综合两部分设计复合控制电流的开关磁阻电机恒转矩控制系统。
2 基于TSF的线性电流控制
SRM的TSF控制系统框图,如图2所示,包括转矩分配、转矩-电流转换及电流滞环控制器三个主要部分。

图2 TSF控制系统框图
SRM采用的简化线性相电感Lk,其转矩-电流转换表达式为[9]:

(4)

图2中转矩分配,采用文献[11]所描述的最佳分配函数—立方分配函数,其表达式为:

(5)
(6)
式中,θon为开通角;θov为换相重叠角;θoff为关断角;k=1,2,3。
3 基于回声状态网络的非线性电流控制
为了弥补TSF采用线性电感模型的不足,设计的复合控制电流的开关磁阻电机恒转矩控制系统,其框图如图3所示,主要包括TSF线性电流控制器、具动态记忆能力,能反应动态系统特性和演化行为的ESN[12]非线性电流控制器、电流滞环控制器、SRM广义特性(由SRM、功率变换器及电流滞环控制器组成)辨识。
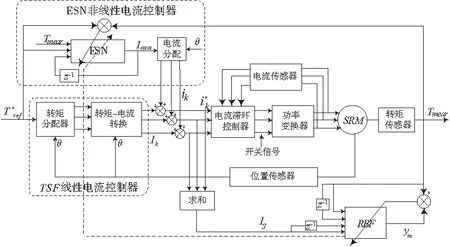
图3 基于复合控制电流的开关磁阻电机恒转矩控制系统框图
3.1 基于回声状态网络的非线性电流控制

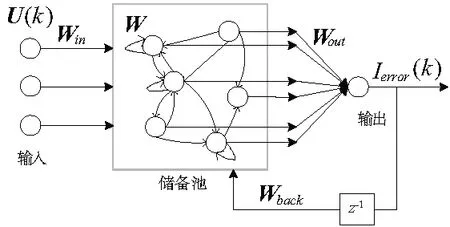
图4 回声状态网络结构图
网络的状态可表示为:
Q(k+1)=f(WinU(k)+WQ(k)+WbackIerror(k))
(7)
Ierror(k+1)=WoutS(k)
(8)
式中,Q(k)=[q1(k),q2(k),…,qN(k)]T∈RN为内部状态变量;S(k)=[U(k),QT(k),Ierror(k)]T∈RL+N+M,[·]T表示矩阵的转置运算。Win∈RN×L,Wback∈RN×M分别表示输入连接权、反馈连接权矩阵,在初始化阶段按照N×L、N×M的矩阵格式,在-1~1之间随机产生,并且在训练过程中保持不变。需要进行训练的系统输出连接权矩阵Wout∈RL+N+M初始化为权值0.01的列向量(L+N+M)×1。f=[f1,f2,…,fN]表示神经元激活函数,fi(i=1,2,…,N)采用双曲正切函数,输出层采用线性函数。
信息处理的核心ESN储备池影响网络的稳定性及对非线性的逼近能力,综合考虑到运算量与逼近能力,取储备池维数D=60,内部连接权值W∈RN×N的稀疏度为2%,连接权谱半径为0.5,生成方法如下[15]:

(2) 标准化W1=(1/|λmax|)W0,λmax为稀疏矩阵的最大绝对特征值。
(3)对稀疏矩阵进行缩放W=αW1,α<1为W的谱半径,取值0.5。
对于ESN在实际应用中存在的病态解,该文参考文献[16]的方法,通过矩阵奇异值分解,对小奇异值进行舍弃处理。
3.2 ESN的学习过程
设其性能指标函数为:
(9)
根据梯度下降法,ESN输出权值调整算法为:
(10)
式中,wlj为输出层权值参数,η为参数调整学习率。
(11)
式中,netl(k)、∂ol(k)分别为网络输出层第l个节的净输入及输出,qN(k)为回声神经网络状态输出,∂Tmear(k)/∂IS(k)为SRM广义特性的Jacobian信息,通过RBF在线辨识得到。
3.3 基于RBF 的Jacobian 在线辨识

辨识网络的输出为:
(12)
式中,wj为隐含层神经元与输出层神经元的连接权。
辨识器的性能指标函数为:

(13)
式中,Tmear(k)为电机输出的瞬时转矩信号;ym(k)为RBF辨识网络的输出。
根据梯度下降法,对输出权、节点中心及节点基宽参数进行迭代计算[17]。Jacobian信息可表示为:
(14)
式中,x1=IS(k)。
3.4 复合电流控制

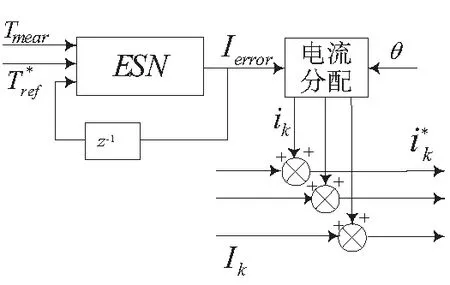
图5 复合电流控制
电流分配是根据公式(5)的立方分配函数f(θ)将控制器的输出电流Ierror分配成各相非线性控制电流ik,计算公式为:
(15)
式中,θon为开通角;θov为换相重叠角;θoff为关断角。
复合控制电流为:
(16)

4 仿真验证与分析

转矩脉动系数KT是评价控制效果标准:

(17)
式中,Tmax,Tmin,Tav分别表示电机稳态运行时的最大瞬时转矩,最小瞬时转矩及平均电磁转矩。
4.1 SRM复合控制电流分析

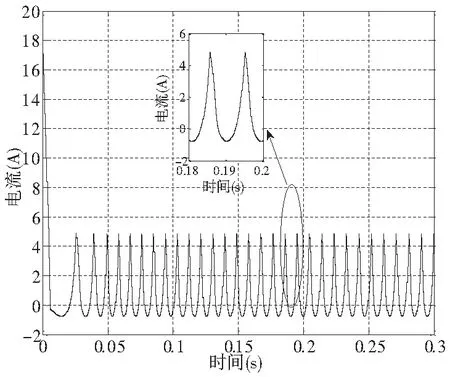
(a) ESN电流控制器输出的非线性电流Ierror波形
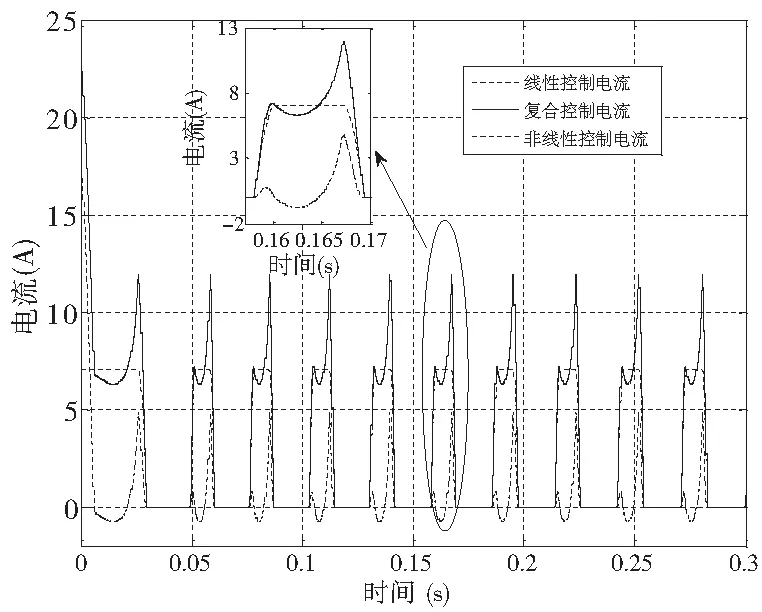
(b) 线性、非线性及复合控制电流图6 非线性电流与控制电流
4.2 仿真结果分析
图7为基于复合控制电流的开关磁阻电机恒转矩控制仿真转矩结果。其输出的转矩迅速收敛至期望转矩,且稳态运行时转矩偏差值最大为0.0508,稳态时转矩脉动系数KT为1.75%。与采用简化线性电感模型的TSF控制进行对比,TSF控制仿真转矩结果如图8所示,转矩脉动系数为57.3%,具体数据见表1。仿真结果对比可知,该文所提出的基于复合控制电流的开关磁阻电机恒转矩控制可有效抑制转矩脉动。
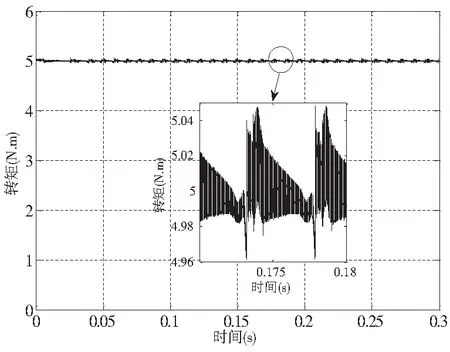
图7 基于复合控制电流的开关磁阻电机恒转矩控制转矩波形
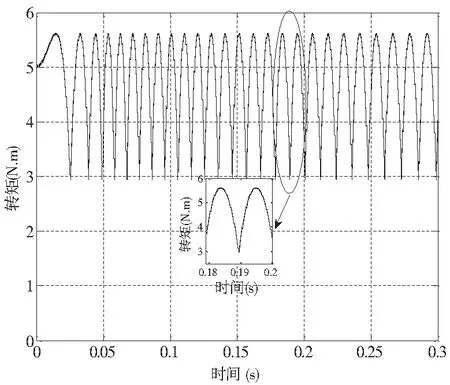
图8 TSF控制策略的转矩波形
图9为设定转矩阶跃变化响应曲线,系统输出转矩能够快速跟踪给定值,验证所提出的方法具有良好的动态响应性能。
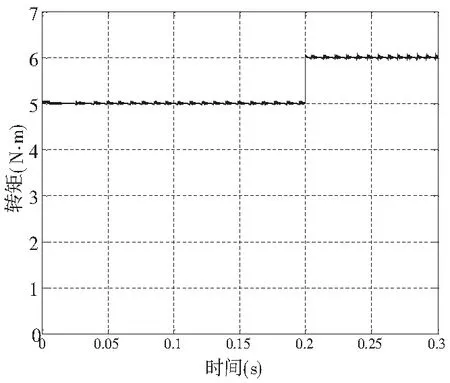
图9 设定转矩阶跃变化响应曲线

表1 转矩脉动系数kT对比
5 结论
该文分析了SRM的线性及非线性特性,设计了基于ESN的非线性电流控制与传统TSF线性控制电流,共同构成复合控制电流对开关磁阻电机的转矩进行控制。仿真结果表明,所提出的复合控制电流的开关磁阻电机恒转矩控制策略对给定转矩收敛快,稳态转矩脉动小且具有良好的动态性能,验证了所提出方法对转矩脉动抑制的有效性。
[1] 周素莹,林辉. 减小开关磁阻电机转矩脉动的控制策略综述[J]. 电气传动,2008, 38(3): 11-17.
[2] 梁涛年, 李勇, 赵崇晖. 开关磁阻电机控制策略综述 [J]. 微特电机, 2014,42(12):77-81.
[3] Afjei E, Moeini R, Mahmoodi M M, et al. Analysis of torque ripple reduction methods in switched reluctance motor[C]//Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), 2014 International Symposium on. IEEE, 2014: 427-432.
[4] Murugan M, Jeyabharath R. Neuro Fuzzy Controller Based Direct Torque Control for SRM Drive[C]//Process Automation, Control and Computing (PACC), 2011 International Conference on. IEEE, 2011: 1-6.
[5] Lu D, Kar N C. Neural network based torque control of switched reluctance motor for hybrid electric vehicle propulsion at low speeds[C]//Electro Information Technology, 2009. eit'09. IEEE International Conference on. IEEE, 2009: 417-422.
[6] Constantin P, Hao C, Colak I, et al. Sensorless control of SRM by the aid of artificial neural network adaptive reference model[C]//Proceedings of the 2011 14th European Conference on Power Electronics and Applications, 2011.
[7] 张云,徐衍亮,孔辉,等. 电流最优的多变量静态神经网络开关磁阻电机控制[J]. 电工技术学报,2013, 28(8): 250-258.
[8] 蒋涛.基于动、静态电感特性的开关磁阻电机非线性磁参数模型[J]. 微电机,2010, 43(6): 20-23.
[9] Sanjib K Sahoo, Sanjib K Panda, Jian-Xin Xu. Indirect Torque Control of Switched Reluctance Motors Using Iterative Learning Control[J].IEEE TRANSACTIONS ON POWER ELECTRONICS, 2005, 20(1):200-208.
[10] 党选举,肖逢,林诚才. 基于电流迭代优化的 SRM 总转矩 TSF 闭环控制[J]. 电气传动,2015, 45(8): 41-46.
[11] Xue X D, Cheng K W E, Ho S L. Optimization and evaluation of torque-sharing functions for torque ripple minimization in switched reluctance motor drives[J]. Power Electronics, IEEE Transactions on, 2009, 24(9): 2076-2090.
[12] Boccato L, Soriano D C, Attux R, et al. Performance analysis of nonlinear echo state network readouts in signal processing tasks[C]//Neural Networks (IJCNN), The 2012 International Joint Conference on. IEEE, 2012: 1-8.
[13] 司利云,王铁勇. 基于回声状态网络的开关磁阻电机建模[J]. 电机与控制应用,2015, 42(6): 21-26.
[14] Song Q, Feng Z, Lei M. Stable training method for echo state networks with output feedbacks[C]//Networking, Sensing and Control (ICNSC), 2010 International Conference on. IEEE, 2010: 159-164.
[15] Dai J, Venayagamoorthy G K, Harley R G, et al. Indirect adaptive control of an active filter using Echo State Networks[C]//2010 IEEE Energy Conversion Congress and Exposition. IEEE, 2010: 4068-4074.
[16] 刘颖, 赵珺, 王伟, 等. 基于数据的改进回声状态网络在高炉煤气发生量预测中的应用[J]. 自动化学报, 2009, 35(6): 731-738.
[17] 周佳,卢少武,周凤星. 伺服位置控制参数的RBF神经网络自整定研究[J]. 组合机床与自动化加工技术,2016(3):75-77,81.
[18] 党选举,袁小唐,胡景佳. 基于柔性神经网络的 SRM 直接瞬时转矩控制[J]. 电气传动,2014, 44(5): 62-66.
ConstantTorqueControlforSwitchedReluctanceMotorBasedonCompositeControlCurrent
DANG Xuan-jua, ZHANG Bao-sena, JIANG Huia, WU Xi-rua, LI Shanb
(a.School of Electronic Engineering and Automation;b.National Demonstration Center for Experimental Electronic Circuit Education (Department of Experiential Practice), Guilin University of Electronic Technology, Guilin Guangxi 541004,China)
Switched reluctance motor exists high torque ripple at low speed, which greatly limits its application in the production. The linear control current is obtained by TSF controller based on linear inductance model is hard to effectively restrain the torque ripple that led by SRM with strongly nonlinearity characteristics. A current control scheme based on echo state network (ESN) is proposed to solve torque ripple. A current controller is designed for obtaining nonlinear current in real-time which is caused by dynamic inductance to solve nonlinearity characteristic of SRM. The composite control current is obtained by superimposing the nonlinear output current of ESN current controller to linear control current of TSF controller. Two currents working together can improve the dynamic performance of the system and restrain the torque ripple effectively. Simulation results verify that the proposed control strategy in this paper can effectively reduce torque ripple of the motor.
switched reluctance motor; torque ripple; dynamic inductance; echo state network
TH39;TG506
A
(编辑李秀敏)
猜你喜欢
大电机技术(2022年5期)2022-11-17
中国特种设备安全(2022年3期)2022-07-08
遥测遥控(2022年1期)2022-02-11
防爆电机(2021年4期)2021-07-28
时代人物(2019年29期)2019-11-25
电子制作(2018年19期)2018-11-14
中国惯性技术学报(2017年1期)2017-06-09
舰船科学技术(2015年8期)2015-02-27
现代防御技术(2014年5期)2014-02-28
地震研究(2014年1期)2014-02-27
