摩擦式提升机减速点距离设定方法研究与应用
2017-11-13 06:49齐卫东
中国煤炭 2017年10期
齐卫东 赵 强 张 浩
(1.枣庄矿业集团公司蒋庄煤矿,山东省滕州市,277519; 2.枣庄矿业集团公司供电工程处,山东省枣庄市,277000)
★ 煤炭科技·机电与信息化★
摩擦式提升机减速点距离设定方法研究与应用
齐卫东1赵 强1张 浩2
(1.枣庄矿业集团公司蒋庄煤矿,山东省滕州市,277519; 2.枣庄矿业集团公司供电工程处,山东省枣庄市,277000)
对摩擦式提升机减速点距离设定现状进行了分析总结,以升降人员时自由减速度取0.75 m/s2和升降物料时自由减速度取1.2 m/s2为上限作为超调数据,提出以自由减速度计算设定减速点距离方法和以基于自由减速度为主的自由减速控制模式,改善了摩擦式提升机减速段控制性能。
副井提升机 自由减速度 提升负荷 减速点距离可变 变位质量
我国煤矿主提升机电控系统经历了有接点模拟继电器控制和无接点数字化计算机控制两个过程。无接点数字化计算机控制系统较早期电控产品具有更高的可靠性和低故障率,但数字化计算机电控系统在控制策略上只是用计算机程序取代继电器接点,先进控制策略并没有得到应用。尤其是在减速点减速距离设计上,仍然按照固定距离设定原则,即提升容器上行至停车终端一定距离时,减速开关发出减速信号,然后提升机减速、爬行至终端停车。这种控制策略应用于副井提升负荷变化较大的工况下,具有明显的局限性。
1 摩擦式提升机减速点距离设定现状分析
煤矿摩擦式提升机在减速点设定规范上,一般采用固定减速点距离设定方法,提升机运行到设定的减速点距离后,机械或电磁开关向提升机电控系统发出减速信号,提升机综合系统给定速度和实际速度的差值信号,调节正负制动力矩,使提升机产生满足要求的减速度,实现提升机减速、爬行至终端停车。由于副井提升机提升负荷变化大,尤其是减速度较小的情况下,提升机容易出现跳闸停车事故,影响提升机的安全运行。
1.1 基于固定距离的减速点设定分析
主井摩擦式提升机箕斗采用定重装载方式,摩擦滚筒两侧张力差值恒定,提升负荷性质单一,在减速点距离设定上,适用于固定距离设计。而副井摩擦式提升机主要依靠人工调节罐笼负荷张力差值不超过允许张力差值,提升负荷性质变化大,系统变位质量也跟随变化大。如果减速点距离采用固定距离设定原则,提升重载时,自由减速度较大,会发生爬行距离加大现象,提升机运行经济性差;提升轻载时,因减速度较小,如果没有可靠的负力制动,会发生爬行距离减小以至于跳闸停车现象,提升机运行安全性差。因此,副井摩擦式提升机应根据提升负荷大小,与等速段速度相结合,采用减速点距离设定随机可变控制策略。
1.2 基于提升速度的可变减速点设定分析
目前,煤矿提升机电控系统普遍选用了以可编程控制器为核心的控制器件,为提升机提供了灵活多变的控制逻辑模式。有些煤矿在提升机减速点距离设定上采用了跟随速度变化而变的技术方案,其主要方案是通过PLC采集提升机旋转信号,折算提升机速度和行程,然后根据公式(1),计算出提升机减速段行程S,减速段行程S加上爬行距离即得到减速点距离,以此距离发出减速信号,实现减速点距离可变。
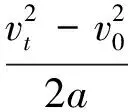
(1)
式中:vt——等速段速度,m/s;
v0——爬行段速度,m/s;
a——减速度,为预先设定的固定数值,具有不变性,m/s2。
基于提升机等速段速度变化而设定可变的减速点距离方案,只是根据提升机等速段速度的不同改变了减速点距离的设定,和提升机提升负荷没有关系。一般摩擦式提升机运行过程中,除下放爆炸物品等特殊物品要求限制速度外,为保证其运行经济性,摩擦式提升机等速段运行速度都要达到其设计的最大额定速度。也就是说,排除下放爆炸物品等有要求限速的特殊物品外,摩擦式提升机根据等速段速度设定减速点距离信号仍然是按照固定距离设定减速点距离,具有一定的局限性。
2 基于提升负荷的减速点距离设定方法分析
副井提升机一般分为两种提升负荷工况,一是提升重载,即经过一个提升循环过程后,两个罐笼的负荷差值位能增加;二是下放重载,即经过一个提升循环过程后,两个罐笼的负荷差值位能降低。副井提升机提升负荷经常变化,由此产生的自由减速度也是变化的。最大化实现提升机自由减速,自由减速度超限时适当调制是副井提升机安全经济运行的重要技术措施。《煤矿安全规程》(2016版)要求升降人员的提升机减速度不大于0.75 m/s2,《煤矿地面多绳摩擦式提升系统设计规范》(MT5021-1997)要求升降物料的提升机减速度不大于1.2 m/s2。在满足摩擦式提升机防滑的条件下,提升机升降人员时减速度取0.75 m/s2,升降物料时减速度取1.2 m/s2。
2.1 减速点距离设定系统硬件组成
为实现副井提升机减速点距离可变,系统硬件主要由双线制可编程控制器、双相编码器、罐笼张力检测装置、罐笼同步开关和提升信号等组成,系统硬件组成如图1所示。双相编码器分别与主滚筒和导向轮同轴安装,分别计算提升机提升行程和换算速度,实现冗余比较;罐笼张力检测装置连接在提升钢丝绳终端位置,利用无线发送原理传输,传送到后台计算机处理计算罐笼提升负荷;罐笼同步开关安装在距离上井口一定距离的井筒中,用来校正提升机行程误差;提升信号输入给双线制可编程控制器,按规定点数判断提升方向;双线制可编程控制器为一对冗余的可编程控制器,是系统的主控制器,完成提升机自由减速度、减速点距离等数据计算,向提升机电控系统发送制动力矩调制信号。
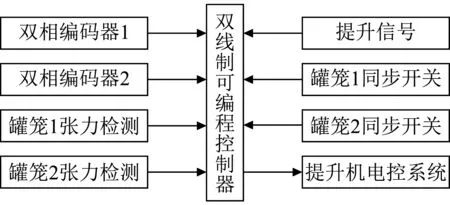
图1 减速点距离设定系统硬件组成
2.2 减速点距离设定方法实现
通过采集提升机两个罐笼的负荷值m1、m2及负荷差值,根据提升机系统变位质量M,计算出提升机自由减速度a:
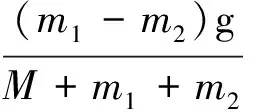
(2)
式中:a——提升机自由减速度,m/s2;
m1——提升机1号罐笼负荷值,kg;
m2——提升机2号罐笼负荷值,kg;
M——提升机系统变位质量,kg;
g——重力加速度,m/s2。
提升机1号和2号罐笼负荷值m1、m2变化,则a变化;a变化,则减速段行程S变化;减速段行程S加上爬行距离,即得到减速点距离,以此距离设定减速点距离,实现减速点距离可变设定。
2.3 减速点距离设定后控制方案
提升机无论提升重载还是下放重载,只要任何一个罐笼乘坐人员,系统均按0.75 m/s2作为最大减速度输出调制制动力矩信号。
2.3.1 提升机提升重载控制方案
提升机如接收到升降人员信号,当自由减速度大于0.75 m/s2时,以0.75 m/s2减速度换算出减速点距离信号,同时输出调制正力力矩信号,使摩擦式提升机以0.75 m/s2减速度减速运行;当自由减速度小于或等于0.75 m/s2时,以自由减速度换算减速点距离信号,提升机以自由减速度减速运行。如接收到升降物料信号时,当自由减速度大于1.2 m/s2时,以1.2 m/s2减速度换算出减速点距离信号,同时输出调制正力力矩信号,使提升机以1.2 m/s2减速度减速运行;当自由减速度小于或等于1.2 m/s2时,以自由减速度换算出减速点距离信号,提升机以自由减速度减速自由运行。
2.3.2 提升机下放重载控制方案
提升机如接收到升降人员信号时,以0.75 m/s2减速度换算出减速点距离信号,同时输出增大调制负力力矩信号,使摩擦式提升机以0.75 m/s2减速度减速运行;如接收到升降物料信号时,以1.2 m/s2减速度换算出减速点距离信号,同时输出增大调制负力力矩信号,使摩擦式提升机以1.2 m/s2减速度减速运行。
2.4 减速点距离设定控制流程图
系统打开电源后首先进行初始化,然后系统不断读取提升机罐笼提升负荷数据,接收到开车信号后,系统以接收到开车信号前的罐笼提升负荷数据作为最终负荷数据,同时更新提升系统变位质量,计算提升机自由减速度。系统根据接收到的开车信号,判断升降人员或物料状态和提升重载或下放重载性质,按照不同的控制策略运行,控制流程如图2所示。
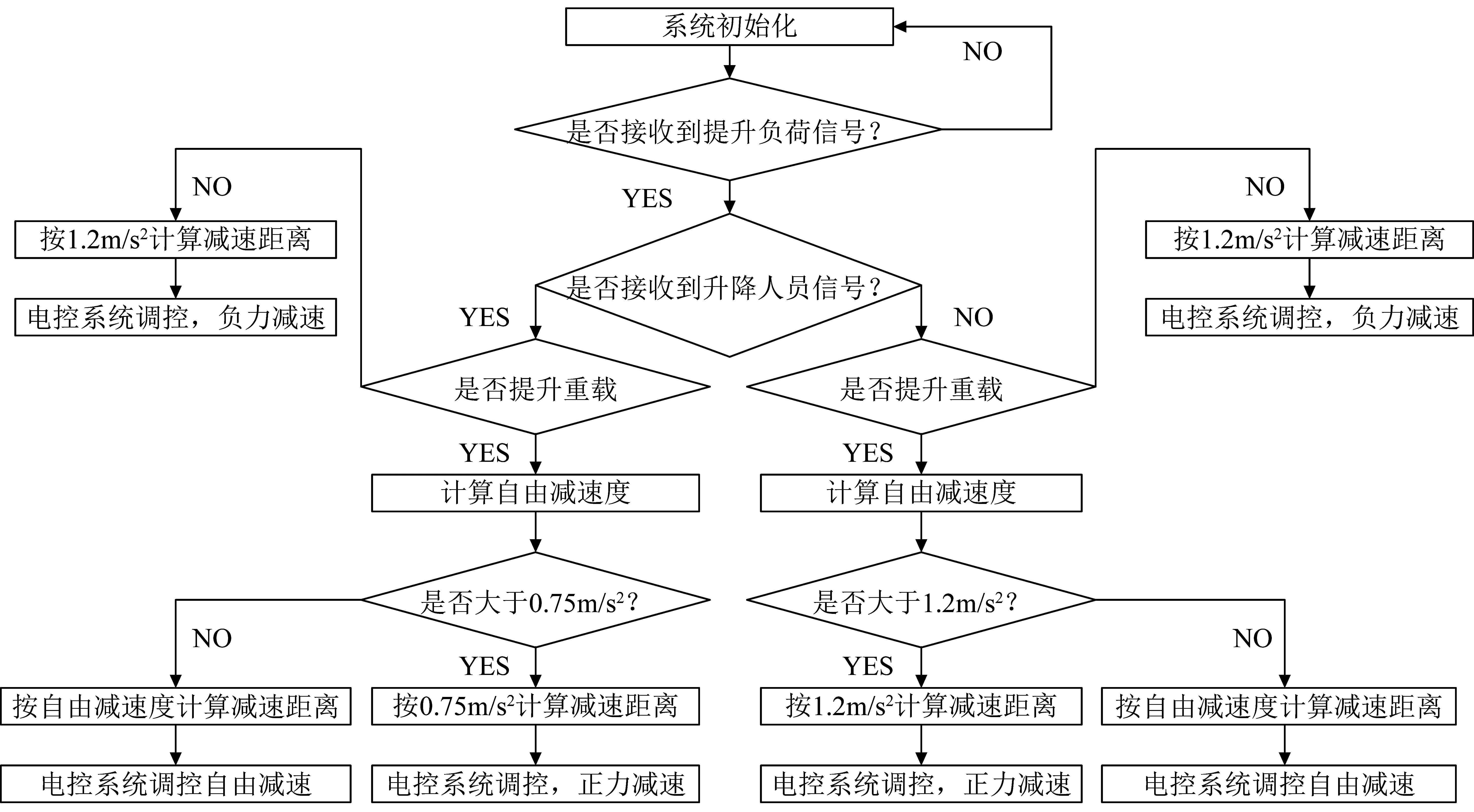
图2 减速点距离设定控制流程图
3 结语
目前,煤矿副井摩擦式提升机减速点距离设定普遍采取固定距离设定方法,对于提升负荷变化较大的副井摩擦式提升机而言,在固定减速点距离下,把变化的自由减速度调制为一个恒定的减速度,不仅难以调节,而且影响副井摩擦式提升机运行的安全经济性。结合摩擦式提升机等速段速度,根据不同提升负荷采用可变化的减速点距离设定方法,实现摩擦式提升机防滑安全 条件下自由减速控制,是副井摩擦式提升机优先选用的技术方案。
[1] 崔成宝,赵强,徐磊等.副井摩擦式提升机钢丝绳张力差监控系统研究[J].煤矿机械,2009(7)
[2] 赵强.主井摩擦式提升机防重载下放关键技术研究[J].煤矿机械,2012(9)
[3] 王瀚哲.煤矿副井提长机整流器网侧谐波分析与治理[J].中国煤炭,2015(5)
[4] 肖栋军.徐杏娟.张军峰.基于PLC的矿井提升机变减速点的应用[J].电气传动自动化,2013(6)
[5] 国家安全生产监督管理总局.煤矿安全规程[S].北京:煤炭工业出版社,2016
Researchandapplicationoffrictionhoistdecelerationpointdistancesettingmethod
Qi Weidong1, Zhao Qiang1, Zhang Hao2
(1. Jiangzhuang Mine, Zaozhuang Mining Industry Group Limited Company, Tengzhou, Shandong 277519, China;2. Power Supply Engineering Department, Zaozhuang Mining Industry Group Limited Company, Zaozhuang, Shandong 277000, China)
The current situation of the deceleration point of friction hoist was analyzed and summarized. Taking 0.75 m/s2of free deceleration speed when hoisting persons and 1.2 m/s2when hoisting materials as overshoot data, proposing a calculation method for deceleration point distance based on free deceleration speed and free deceleration control mode based on free deceleration speed, which could improve control performance of friction hoist in slowdown period.
auxiliary shaft hoist, free deceleration speed, hoist load, variable deceleration point distance, equivalent mass
齐卫东,赵强,张浩.摩擦式提升机减速点距离设定方法研究与应用[J].中国煤炭,2017,43(10):88-90,136.
Qi Weidong, Zhao Qiang, Zhang Hao.Research and application of friction hoist deceleration point distance setting method[J]. China Coal, 2017,43(10):88-90,136.
TD534
A
齐卫东(1969-),男,山东单县人,工程硕士,高级工程师,从事煤矿安全工程管理与技术研究工作。
(责任编辑 张艳华)
猜你喜欢
能源与环保(2022年9期)2022-10-25
山东冶金(2022年4期)2022-09-14
电子乐园·上旬刊(2022年5期)2022-04-09
新疆有色金属(2020年3期)2020-09-14
湖北农机化(2020年8期)2020-06-19
湖南安全与防灾(2020年12期)2020-02-04
建材发展导向(2019年5期)2019-09-09
企业文化·中旬刊(2016年12期)2017-05-05
环球人文地理·评论版(2016年6期)2016-08-23
科技视界(2015年23期)2015-12-22