智能空间内车辆行驶状态信息融合试验分析
2017-11-14 03:10刘建行徐国艳
河南科技大学学报(自然科学版) 2017年1期
刘建行,蔡 尧,徐国艳,高 峰
(北京航空航天大学 交通科学与工程学院,北京 100191)
智能空间内车辆行驶状态信息融合试验分析
刘建行,蔡尧,徐国艳,高峰
(北京航空航天大学 交通科学与工程学院,北京 100191)
采用分布式传感器信息融合方法,进行空间内车辆行驶状态信息感知。利用空间内固定摄像头和地感线圈获取车辆行驶状态信息的检测方法,进行车辆行驶状态信息实车采集试验。对两种传感器采集的车辆行驶状态信息检测结果进行融合,并分析了融合结果的检测精度。研究结果表明:该融合方法的检测精度较固定摄像头提高了5%,有效降低了各传感器检测信息的不确定性,提高了智能空间内车辆行驶状态信息的检测精度。
智能空间;高速公路;分布式传感器;信息融合
0 引言
目前,智能交通系统(intelligent transportation system,ITS)已成为世界公认的解决道路交通安全问题的有效途径,是当今国际道路和交通运输领域的重要研究方向。智能车辆作为智能车辆-高速公路系统的重要组成部分,其基本原理是利用先进的车载传感器系统、信息处理系统和执行系统对驾驶员的状态、车辆周围环境和车辆自身状态进行监控,并应用机器视觉、雷达、全球定位系统和双目视觉等传感器获取运动车辆的目标跟踪、检测与定位、识别车道线等[1-2]。然而,在高速公路行驶条件变化的情况下,通信网络受阻而失效的问题,以及在前方较远路段发生交通事故或有雨、雾等能见度较低的情况下,如何提前通知车辆前方的行驶工况等问题尚未得到解决。由于不同传感器各自性能的特点、对复杂道路的识别情况和安装问题,使传感器容易受到环境的影响,如在能见度低和阴雨等恶劣天气下摄像头采集图像不清晰,多辆车行驶在同一方向时会产生相互干涉,使得多源信息融合技术的推广受到一定阻碍。同时,智能车辆自身安装的雷达和机器视觉等各类传感器,具有车载系统复杂、感知范围有限等局限性[3-5]。因此,单纯利用车内安装多源传感器实现车辆对环境的感知,来解决车辆的行驶安全问题,在技术上很难普及。
基于上述情况,本文提出了将高速公路智能化设计的新思想,基本设想是在道路周围布置智能化传感器,采用先进的通信理论和技术,使高速公路形成一个分布式的智能化空间[6-7],即高速公路智能空间(highway intelligent space,HIS)。当车辆经过HIS时,可以充分利用空间智能化设备和服务器中心发送的信息,获取前方车辆行驶情况和道路情况,保证车辆安全驾驶。针对特定的高速公路行驶环境,在雨、雪和雾等能见度较低的天气情况以及容易发生交通事故的路段下,该思想的提出可以保证车辆安全有效感知环境。在高速公路智能空间系统的基础上,本文运用空间内分布式传感器固定摄像头和磁感线圈采集获取车辆的行驶状态信息,并通过试验对两种信息的数据融合结果进行分析,提出了一种提高车辆行驶状态信息检测精度的信息融合方法。
1 高速公路智能空间系统
高速公路智能空间系统是由机器人领域的智能空间结合特定的高速公路环境提出的,其概念是在高速公路环境的封闭空间内安装分布式传感器,利用通信技术,实现高速公路内活动的个体车辆与信息服务器之间的数据交互[8]。HIS系统主要由3个部分组成:传感、通信和网络等处理设备,HIS服务器以及公路内的车辆个体。传感、通信和网络等处理设备指的是各类传感器(如摄像头、雷达等)、通信网络设施(如移动网络基站、无线射频网络等)及计算设备(如车载终端、服务器工作站等)。目前用于HIS系统的传感器有地感线圈、摄像机和雷达。HIS服务器由数据处理中心(data processing center,DPC)和数据通信中心(data communication center,DCC)构成。DPC负责处理传感器采集的数据,包括信息融合、数据处理、信息预测及数学模型分析。DCC负责发送DPC处理完的数据,多个数据组成有效信息单元发送到空间内行驶的车辆中。
HIS系统是一个嵌入了通信设备和多模态传感装置的工作空间,空间中的智能网络设备具有环境信息感知、计算处理、信息交互与发布的功能,车辆可以根据自己的行驶工况获取详细的行驶状态[9]。HIS系统的工作原理:当车辆在高速公路智能空间中行驶时,HIS通过各类传感器采集必要的车辆行驶数据信息,判断当前车辆行驶状态,将环境感知数据以信息单元数据包的形式发送给特定车辆,驾驶员基于该环境信息可调整行驶策略。
传感器组件采集并输出未经过处理的原始数据,提供给信息处理组件自身硬件信息,以方便其识别和分检。信息处理组件接收来自传感器组件的原始数据,按照信息类别分析和合成,最终加工成所需的信息。信息融合预测组件以信息处理组件输出信息为输入,经过多传感器信息融合预测算法处理后,得到最终有效数据发送至指定车辆中。HIS系统中拥有大量分布式摄像机、雷达和地感线圈等传感器,其车辆行驶状态检测与传感信息融合规模庞大。传统的车载信息处理系统受限于体积,计算能力十分有限,而基于HIS系统的分布式处理方式将复杂的计算目标分解为若干个子模块,既能提高道路识别的实时性,又能为车辆的安全驾驶提供更全面的信息。
根据高速公路行驶的特点和车辆的动态特性,HIS系统采用分布式传感器处理方式来获取车辆的实时性动态信息,通过多种传感器检测车辆状态,将其交由HIS服务器进行数据处理,生成有效环境信息发送到指定车辆中[10]。智能空间中的传感器数量巨大,且传感器类型、结构各不同。雷达具有在恶劣气候下直接检测到车速、检测侧向上多车道的显著优点,其缺点是无法检测低速行驶或静止的车辆。磁感线圈具有技术相对成熟、检测精度高和成本低等优点,目前已经实现标准化配置,但其缺点是修理或安装时,往往需要中断交通等过程,相对比较复杂。机器视觉传感器应用较广泛,不仅可以提供大量的道路交通和车辆信息,而且容易实现对车道的多车检测,其成本较低,但容易受到天气环境影响,且其检测速度往往取决于算法的优劣,对理论的要求度较高。根据各种类型传感器的检测特性、成本及应用范围,HIS系统采用的传感器以摄像头传感器及地感线圈为主,以雷达及全球定位系统等其他传感器为辅。
2 分布式传感器检测车辆行驶状态
2.1空间固定摄像头检测
本课题组前期研究工作主要以空间内固定摄像机的单目视觉为基础,实现了视觉图像的运动车辆检测和跟踪[11-12]。从视觉图像中获取运动车辆的几何位置数据,需建立运动车辆位置点与其在摄像机中所处的图像位置点之间的数学关系,即确定摄像机的成像模型。本文运用针孔模型实现运动车辆定位。
高速公路智能空间中运动车辆的定位是在摄像机的固定条件下进行,所以摄像机的高度固定而且视角与地面保持平行,针孔测距模型[13]需将图像中目标特征点P′的像平面坐标(u,v)转换为地面坐标系xoy下的坐标P(x,y)。
摄像头被固定在一个位置,P为物体;P′为物体在图像中的特征点;h为摄像机到地面的垂直距离;yb为摄像机垂直视角投影在地面上的最近距离;yb+yl为摄像机垂直视角投影在地面上的最远距离;xl为当摄像机垂直视角投影在地面上的距离最远时,其水平视角投影在地面上的距离;α和β分别为摄像机垂直视角射线与地平面y轴的最大夹角和最小夹角;θ为摄像机水平视角在地面上的投影与地平面y轴夹角。
(1)
其中:h、yb+yl和xl可以实际测量。由式(1)可以推导出:
(2)
(3)

(4)
其中:x和y分别为点P(x,y)在摄像机支架坐标系xoy下的横坐标和纵坐标,即运动车辆与摄像机支架在水平方向上和垂线方向上的距离;Sx和Sy分别为图像平面在x方向和y方向总的行数和列数;L为运动车辆与摄像机支架的距离。
得到摄像机到运动车辆的距离后,可以利用相邻帧间距离差与时间的比值得到运动目标的速度。设第k帧的速度为vk,第k帧运动车辆距离摄像机支架距离为Lk,前一帧的距离为Lk-1,两帧图像间的时间为t,则可以得到速度计算公式。运动车辆的加速度可以照同样的方法获得,这里不再赘述。
分析:巫先生的版本是“保留判断是表示怀有无限的希望”[5]。巫老先生的翻译宗旨是尽量贴合原文韵味,做到“雅”。但过度依赖原文反而导致意味不明,给人一头雾水的感觉。邓氏则顺应汉语的表述习惯并结合自己的理解意译这句话,斟词酌句,将动宾词组转换为句子,使得一句看似抽象的原文变得直白易懂。

(5)
2.2磁感线圈检测
通过检测由环形线圈构成的耦合电路的振荡频率来判断车辆的通过与存在[13],检测系统由环形线圈、耦合振荡电路和信号整形及其放大电路组成,信号整形放大后可以输出到微处理器的计数单元[14]。图1为磁感线圈频率检测电路及其放大电路原理图。

图1 磁感线圈频率检测电路及其放大电路原理图
磁感线圈检测系统作为高速公路智能空间试验平台的一个基础组成部分,是智能空间信息感知系统的关键,与机器视觉的车辆定位检测系统共同完成车辆信息的采集[15]。该试验平台下磁感线圈检测系统结构图如图2所示。

图2 磁感线圈检测系统结构图
单片机作为高速公路智能空间一个单独的分布式传感器节点,完成两组磁感线圈检测数据的处理发布。该节点完成的工作是信息融合的上层数据处理,磁感线圈检测底层数据处理是依靠数字信号处理(digital signal processing,DSP)芯片完成,通过RS232接口与单片机节点进行通信。
3 信息融合试验与分析
本文选择了一段简易公路作为试验路段。该路段为一段长约200 m的单向车行道路,并且试验期间行人、非相关车辆较少,可以有效控制试验路段内的环境及车辆因素,以达到有效控制试验变量的目的。试验主要采用的传感器有两种:机器视觉摄像机和磁感线圈检测器。摄像机采用MV-USBII系列高分辨率工业数字摄像机,其型号是MV-300UC,镜头是基于金属氧化物半导体元件(coplementary metal-oxide semiconductor,CMOS)的M0814.MP系列。试验所用三脚架为专业的摄像机三脚架,气压伸缩式结构,三脚架最高可达6.8 m。根据式(1)~式(5),进行实际道路参数测量,用于车辆距离测定,测量参数:摄像机高度h=450 cm;摄像机垂直视角投影在地面上的最近距离yb=540 cm;摄像机垂直视角投影在地面上的最远距离yb+yl=7 350 cm;摄像机水平视角投影在地面上的最远距离xl=284 cm。地感线圈检测器采用VD108B型单通道智能环路感应器,线圈电感80~300 μH(包含连接线),最佳值150 μH(41 kHz),线圈绕线及检测电路自行制作。
在约150 m的长度内布置两台摄像头传感器,间隔约70 m,前后各空出40 m,电荷耦合元件(charge coupled device,CCD)摄像头安装在马路中间位置,以便能捕获两个方向车道内的车辆;磁感线圈因数量有限,故仅在各个CCD摄像头之间布置了两组,且在单向车道内固定,不能检测双向行驶的车辆。试验路段传感器的安装布置如图3所示。图4为实车试验验证图。

图3试验路段传感器安装布置图

图4实车试验验证图
3.1车辆行驶状态融合试验
信息融合的试验采用其中一台摄像机检测的数据及其覆盖区域内的磁感线圈数据进行融合,检测的目标为一辆单向行驶的大众捷达汽车。分别提取摄像头检测视频及磁感线圈原始数据,经过预处理之后获得所检测车辆的位置坐标及速度数据。摄像头可收集在车辆进入其检测范围内(距离5~65 m)的车辆位置坐标及速度数据。同时,磁感线圈检测器分别检测到车辆进入检测范围起点、终点及摄像头检测器之间的两组数据,故一共获得4组磁感线圈检测的位置及速度数据。分别将上述传感器原始采集的数据结果采用多项式数据拟合的方法获得时间域内连续的曲线,车辆位置坐标曲线见图5,车辆速度曲线见图6。
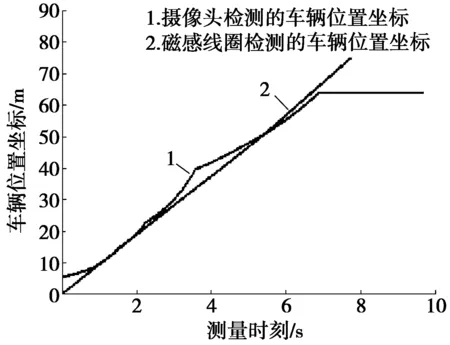
图5 车辆位置坐标曲线

图6 车辆速度曲线
从图5中两组传感器的检测曲线可以看出:以第一个摄像头及磁感线圈为原点的车辆位置坐标曲线基本吻合,磁感线圈检测曲线因为数据点比较少,经过拟合得到的几乎是一个线性的曲线;而摄像头检测曲线在原点附近及在检测终点附近,由于车辆在图像内的像素点过多或过少都无法准确检测车辆的位置,在终点附近检测车辆的位置基本不发生变化。图6是摄像头及磁感线圈对车辆行驶车速的检测曲线。摄像头对车辆车速的检测,受到环境、距离和算法等因素的影响,由图6可以明显看出:在检测过程中出现几个分段的跳变及不连续的情况,而磁感线圈的检测速度准确度更高,但是数据采样点太少,无法在全部检测区域内对车辆进行检测。综合上述原因,采用曲线拟合的办法可以在基本保证检测曲线特征的情况下,将数据由间断曲线转化为连续曲线并为后期的融合配准做准备。
3.2车辆行驶状态信息匹配验证
分析上面的试验检测结果可知:摄像头及磁感线圈检测的车辆行驶状态数据都存在明显的优势和缺点。摄像头对车辆行驶状态信息检测的优势是可以低成本地获得大量的检测数据,缺点是检测结果受到多种因素的影响,因此极其不稳定。磁感线圈的优势是可以获得准确度及可靠性都比较高的检测结果,最大的缺点是由于架设成本问题,无法在公路内进行大规模的密集检测。因此,为了提高车辆行驶状态信息检测的精度及可靠性,需要对采集到的数据进行融合匹配。
实际车辆检测试验结果的处理采用融合权值可变的方法对摄像头及磁感线圈数据进行匹配。根据之前的分析可以知道,磁感线圈检测的数据可靠性极高,因此,在磁感线圈的检测数据点处设置融合权值为1。但是不能完全忽略摄像头检测的数据,因为摄像头可以在整个范围内对车辆监控,可以把握车辆在磁感线圈之间的变化规律,因此对磁感线圈的权值最高设置为0.6,位于两个磁感线圈检测器中间的位置,对权值的原始数据进行多种方式的拟合,获得的权值拟合曲线如图7所示。

图7 权值拟合曲线
图7中:曲线1为采用多项式拟合方法获得的全程融合权值曲线;曲线2为采用插值方法拟合得到的权值曲线。通过对比可以看出:多项式拟合曲线对各个原始点的拟合情况不如插值法,在起止点均出现较大斜率,造成权值的大幅度波动,以至于磁感线圈数据权值在0.5 s及7.2 s左右接近于0,这显然不符合实际情况。所以采用插值方法的权值进行后期融合匹配,并获得曲线3所示的摄像头数据权值。
在车辆位置坐标及车辆速度的融合匹配中,为了体现权值不变与变权值方法的区别,对车辆位置坐标采用固定权值方法融合,对车辆速度采用变权值方法融合,融合结果如图8和图9所示。

图8 车辆位置坐标融合匹配结果对比
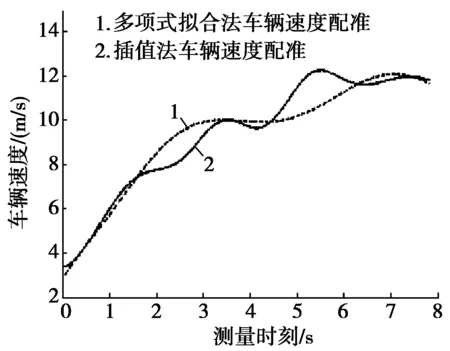
图9 车辆速度融合匹配结果对比
图8中,采用磁感线圈权值为0.6、摄像头权值为0.4的融合结果基本保持了磁感线圈检测的车辆位置坐标的变化规律,并且在部分区域与摄像头数据基本吻合,但是无法确定是否失去了中间阶段的可信度。而图9则是显示两组融合后的车速曲线,通过对比采用多项式拟合权值进行融合的结果和用插值法进行融合的结果。从图8和图9可以看出:变权值曲线相对固定权值方法更能接近实际的情况,同时,插值法权值融合结果在整个测量区域内更加真实地反映了摄像头检测的速度波动,又能兼顾磁感线圈数据的可靠性和可信度,融合结果与车辆行驶记录仪实际记录的车辆运行速度相比,检测精度较单独使用固定摄像头的检测精度提高了5%。采用插值法变权值对车辆行驶状态信息进行融合匹配能有效提高数据可靠性,从而解决高速公路智能空间内异类传感器检测数据融合的问题。
4 结论
(1)将智能车辆对环境感知的任务,转移到高速公路智能空间内进行集中处理,通过车路通信对空间中所有行驶的车辆进行实时、精准和可靠的信息服务。
(2)利用固定摄像头和地感线圈进行车辆行驶状态信息采集试验,对两种传感器的车辆行驶状态信息检测结果进行融合,并分析比较了融合结果的检测精度,融合结果较单一传感器的检测精度更高。
[1]HONG C.Automotive vontrol:the state of the art and perspective[J].Acta automatica sinica,2013,39(4):322-346.
[2]董红召,陈炜烽,郭明飞,等.基于车路一体化的车辆主动避撞系统关键技术的研究[J].汽车工程,2010,32(11):984-988.
[3]XIAO L Y,GAO F.A comprehensive review of the development of adaptive cruise control(ACC) systems[J].Vehicle system dynamics,2010,48(10):1167-1192.
[4]CRISMAN B J,THORPE C.Color vision for road following,vision and navigation:the carnegie mellon Navlab[M].US:Vision and Navigation,2010:9-24.
[5]肖凌云.基于典型信息框架的自动车队分布式控制与队列稳定性分析[D].北京:北京航空航天大学,2011.
[6]HASHIMOTO H,TAKESHI S,LASZLO A J.Current status of intelligent space[J].Journal of measurement science and instrumentation,2010,1(1):86-92.
[7]路飞,田国会,刘国良,等.智能空间下基于WIFI指纹定位与粒子滤波的服务机器人复合全局定位系统设计[J].机器人,2016,38(2):260-265.
[8]TANG X,GAO F,XU G,et al.Distributed model predictive control over multiple groups of vehicles in highway intelligent space for large scale system[J].Mathematical problems in engineering,2014,2014(3):1-12.
[9]TANG X,GAO F,XU G,et al.Vehicle driving dynamics prediction based on highway intelligent space-vehicle framework theory[J].Journal of Jilin university(engineering and technology edition),2015,45(5):1395-1401.
[10]TANG X,GAO F,XU G,et al.Sensor systems for vehicle environment perception in a highway intelligent space system[J].Sensors,2014,14(5):8513-8527.
[11]GAO F,LIU J,XU G,et al.Vehicle state detection in highway intelligent space based on information fusion[C]// The Twelfth COTA International Conference of Transportation Professionals.2012:2307-2318.
[12]马明明.基于视觉的多点车辆行驶状态跟踪[D].北京:北京航空航天大学,2012.
[13]黄小云,高峰,徐国艳,等.基于单幅立式标靶图像的单目深度信息提取[J].北京航空航天大学学报,2015,41(4):649-655.
[14]童亮,李隐,谷云秋,等.基于微型地感线圈检测器在交通流量调查系统中的研究与应用[J].公路交通科技(应用技术版),2015(4):271-272.
[15]张永忠,张军强,李颖宏.多路环形线圈车辆检测器设计[J].电子技术应用,2013,39(11):23-26.
国家自然科学基金项目(51405008)
刘建行(1985-),男,河北唐山人,博士生;高峰(1955-),男,河南洛阳人,教授,博士,博士生导师,主要研究方向为智能车辆/特种车辆及车辆非常规行走机构等.
2016-06-13
1672-6871(2017)01-0021-07
10.15926/j.cnki.issn1672-6871.2017.01.005
U461.3
A
猜你喜欢
大电机技术(2022年4期)2022-08-30
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
装备制造技术(2020年12期)2020-05-22
模具制造(2019年7期)2019-09-25
江苏通信(2018年4期)2018-12-04
自动化学报(2017年7期)2017-04-18
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
新闻前哨(2015年2期)2015-03-11