内激励作用下行星传动系统振动响应研究
2017-11-30 06:58许华超秦大同周建星
振动与冲击 2017年21期
许华超, 秦大同, 周建星
(1. 重庆大学 机械传动国家重点实验室, 重庆 400044; 2. 新疆大学 机械工程学院, 乌鲁木齐 830047)
内激励作用下行星传动系统振动响应研究
许华超1,2, 秦大同1, 周建星2
(1. 重庆大学 机械传动国家重点实验室, 重庆 400044; 2. 新疆大学 机械工程学院, 乌鲁木齐 830047)
基于齿轮系统动力学推导出行星齿轮传动系统的平移-扭转耦合非线性振动微分方程。采用特征值问题求解其固有频率及振型,并进行归类和描述。针对行星齿轮传动系统中内激励频率与转速成正比这一特性,提出一种利用正弦激振扫频模拟其内激励,并通过求解传动系统振动微分方程得到其响应的方法。与传统方法相比,该方法可将系统中复杂的激励分解为若干单一激励,从而量化评价各激励对系统振动响应的影响程度,使各激励与响应形成具体映射关系。研究发现内啮合激励对低阶(1~5阶)与高阶固有频率(16~18阶)影响较小,外啮合激励在低阶固有频率随阶数增加影响递增,并对太阳轮纯扭转振型影响较大,而在中阶固有频率(6~15阶)内外啮合均对行星轮纯扭转振型影响显著,为行星齿轮传动系统固有频率及振型的优化、降振减噪和减小故障发生率提供依据。
行星齿轮; 振动响应; 啮合激励; 固有特性
行星齿轮传动系统以传动比范围大、结构紧凑、承载能力强等诸多优点,已广泛应用于航空航天、能源、交通运输等领域。然而由于行星齿轮传动系统自身结构及内部激励复杂,导致其早期失效频发,已成为制约其向长寿命和高可靠性应用的重要因素之一。故研究行星齿轮传动系统的激励、建模及振动响应特征,对提高和改善行星齿轮传动系统的动力学特性,实现减振降噪、减小故障发生率具有重要的理论价值和工程意义。
国内外专家学者对其进行了诸多有益研究。Kahraman等[1-2]建立了具有齿侧间隙的直齿圆柱齿轮副非线性动力学模型,分别运用谐波平衡法来研究内外激励对系统的振动情况;Han等[3]计入时变啮合刚度与轴弯曲等因素,建立了具有多自由度的单级齿轮系统,并对其振动响应特性进行了较为详细的研究;叶福民等[11]利用Kato公式法,分析了内激励对齿轮副振动噪声的影响;Parker等[5-6]采用集中质量法建立了行星齿轮传动系统的平移-扭转动力学模型,运用模态能量法研究其啮合刚度、支撑刚度、轮体质量和转动惯量对固有频率和振型的影响,就行星轮平移和扭转两种模态进行了讨论;与此同时,Parker等[7]运用有限元/接触力学模型在一定转速和负载范围内对行星齿轮传动系统中行星轮与太阳轮振动响应特性进行了分析;Ambarisha等[8]采用二维集中质量法和有限元法求解了行星传动系统的动态响应;Wei等[9]建立了一对风电机组直齿轮副的力学模型,分析了各类参数对其扭转振动响应的影响;魏静等[10]运用模态叠加法对齿轮箱系统进行了振动响应分析,仿真分析结果与实验数据较为吻合;叶福民等[11]建立了行星齿轮传动系统的非线性动力学模型,讨论了齿轮副模数与压力角对均载荷系统的影响。由于行星传动系统结构及激励的复杂性,上述研究对行星传动系统做了过多的简化,不能准确地对行星传动系统的振动响应进行预估,并且激励与响应的映射关系还无人研究。
针对上述问题,本文提出利用正弦激振扫频来模拟激励的方法,综合考虑了基于啮合相位的时变啮合刚度等因素的影响,运用齿轮系统动力学推导出激励与响应具有映射关系的行星齿轮传动系统耦合振动响应动力学微分方程,采用特征值问题求解其固有频率及振型,并对其进行了归类。同时分别研究了内外啮合激励对行星齿轮传动系统各构件振动响应的影响,对于从设计阶段来实现振动的抑制具有重要意义。
1 齿轮系统动力学模型
行星齿轮传动系统的基本参数如表1所示,其中质量、转动惯量等均由UG NX实体建模后得出;行星齿轮传动系统简图如图1(a)所示,图中标示S代表太阳轮,C代表行星架,R代表内齿圈,Pi(i=1,2,3) 代表行星轮;图1(b)为三维装配模型。

表1 行星齿轮传动系统参数
本文以2K-H行星齿轮传动系统为研究对象,3个行星轮沿圆周均布且参数均相同。由于该系统轴间跨度较短,弯曲刚度较大,故运用集中质量法建立其平移—扭转耦合动力学模型,如图2所示。模型构建时取行星架中心为坐标原点,水平方向为X,竖直方向为Y。模型中不计齿侧间隙和轮齿误差的影响,轮齿啮合采用具有时变刚度的弹簧模拟,行星轮均用轴承支撑,并考虑了时变轴承刚度。图中ks、kc、kr和kpi分别表示太阳轮、行星架、内齿圈支撑刚度和第i(i=1,2,3)个行星轮轴承支承刚度;ksu、kcu和kru分别为太阳轮、行星架和内齿圈扭转刚度;kspi和krpi分别代表太阳轮、内齿圈与第i个行星轮的外啮合刚度和内啮合刚度;us、ur、uc和upi分别表示太阳轮、内齿圈、行星架和第i个行星轮的扭转微位移;ηpi、ξpi分别为第i个行星轮沿中心径向和切向微位移;xn(n=s,c,r) 和yn(n=s,c,r)分别表示构件沿中心横向和纵向微位移。
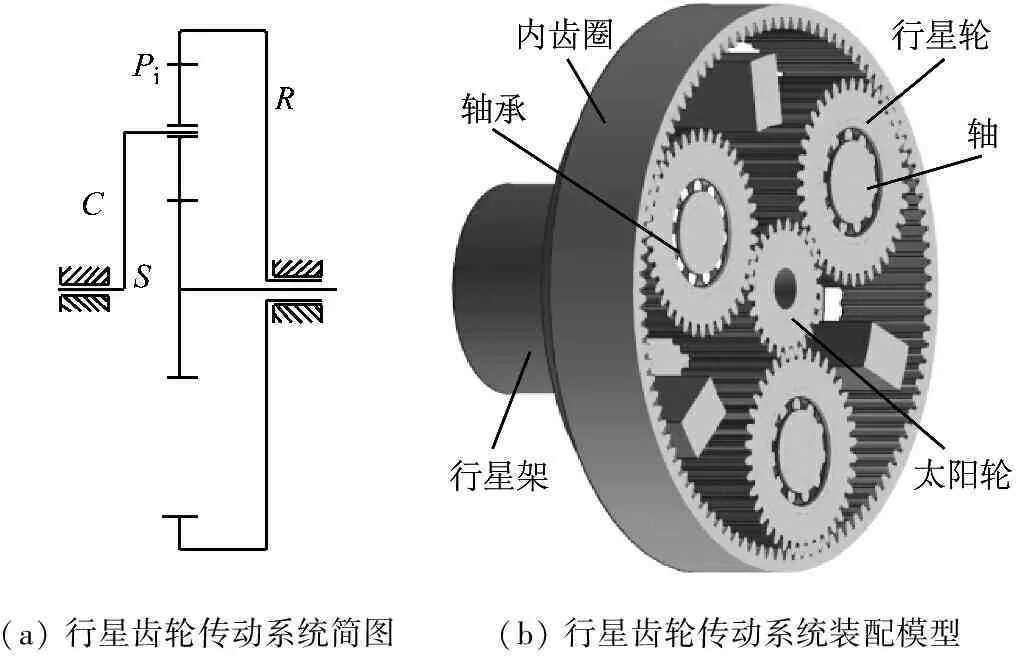
(a)行星齿轮传动系统简图(b)行星齿轮传动系统装配模型
图1 行星传动系统结构简图与三维模型
Fig.1 Structure of planetary gear sets and three- dimensional model

图2 行星传动平移—扭转耦合动力学模型
所建模型中相互啮合轮齿沿啮合作用线方向的弹性变形为:
(1)
式中:δspi、δrpi为太阳轮、内齿圈与第i个行星轮啮合副弹性变形;δcpix、δcpiy和δcpiu为行星架与行星轮的相对位移沿xc、yc和uc方向的投影;ωc为行星架的角速度;其中,φspi(t)=φpi(t)-αspi,φrpi(t)=φpi(t)+αrpi;αspi、αrpi为太阳轮、内齿圈与第i个行星轮的啮合压力角;φpi(t)为第i个行星轮相对于行星轮1的圆周方向夹角。
通过分析各构件在理想位置的受力情况,根据牛顿力学理论,行星传动系统动力学微分方程为
(2)式中:In(n=s,p,c,r)和mn(n=s,p,c,r)为齿轮的转动惯量和质量;rbn(n=s,p,c,r)为齿轮的基圆半径;Tin为系统输入扭矩,作用于太阳轮;Tout为系统输出扭矩,施加于行星架。将式(2)可写为矩阵形式,该式中各列阵和矩阵的维数均为18,得:
(3)
式中:ku为扭转刚度矩阵;km为时变啮合刚度矩阵;kb为支撑刚度矩阵;T为外部载荷;系统各构件的位移向量q表示为:
(4)
2 固有特性分析
由式(3)可知,当系统外部载荷T=0时,无阻尼自由振动方程为:
(5)
将其转化为变特征值问题时:
(6)

求解出行星齿轮传动系统的固有频率(如表2所示)和振型(如图3所示)。该系统的固有频率范围在208 Hz~7 045 Hz,共18阶;振型共划分为3种振动模式,中心构件(行星轮、太阳轮、内齿圈)平移振动模式(中心构件平移振动为主)共有6对等固有频率,它们分别为ω1=ω2、ω4=ω5、ω6=ω7、ω8=ω9、ω11=ω12和ω14=ω15,研究发现引起重频的主要原因为模型中行星轮参数相同导致结构对称;中心构件扭转振动模式(中心构件扭转振动为主) 对应3阶固有频率,分别为ω16、ω17、ω18;行星轮振动模式(行星轮振动状态相同为主)对应3阶固有频率,分别为ω16、ω17、ω18。
3 啮合激励下振动响应方程的构建
3.1基于啮合相位的时变啮合刚度激励
齿轮系统在啮合过程中单双齿啮合交替变化,其啮合刚度具有明显的周期性,将其以啮合频率进行傅里叶级数展开为
(a) 中心构件平移模式

(b) 中心构件扭转模式

(c) 行星轮模式

振动模式固有频率振型中心构件平移振动模式ω1=ω2=208ω4=ω5=277ω6=ω7=368ω8=ω9=465ω11=ω12=802ω14=ω15=1317太阳轮、行星轮和行星架平移振动为主太阳轮或行星轮平移振动为主内齿圈平移振动为主中心构件扭转振动模式ω16=5825ω17=6706ω18=7045行星架纯扭转太阳轮纯扭转内齿圈纯扭转行星轮振动模式ω3=246ω10=559ω13=1177行星轮平移为主行星轮纯扭转
(7)
式中:k0为平均啮合刚度;n为转速;z为齿数;ki,Φi为第i阶分量的幅值和相位。
基于啮合相位并采用数值方法求解时变啮合刚为
(8)
式中:βspi为第i个行星轮相对于第一个行星轮的相位角(βsp1=0°);Δβ为内外啮合相位差,行星轮齿数为奇数时Δβ=1/2,为偶数时Δβ=0。
3.2振动响应方程的构建
由式(7)可知激励频率及其倍频均与转速成线性比例关系,故本文采用正弦激振扫频的方法来模拟内激励对系统振动响应的影响,假设行星齿轮传动系统在增速过程中内激励频率从fmin增大至fmax所用时间为T,则激振力可表示为
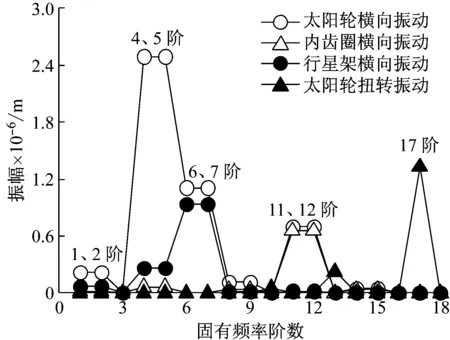
f(t)=Fsin(fmin+at)t, 0 (9) 式中:F为激振力幅值;a为激励频率范围相对于扫频时间的系数,a=2π(fmax-fmin)/T; 通过式(9)即可模拟各激励,并作用于系统模型(2)中激励相应位置上,即可推导出行星齿轮传动系统振动响应动力学方程: Fnsin(fmin+at)t (10) 式中,Fn(n=s,c,r,pi,ksp,kpr)为太阳轮、行星架、内齿圈、行星轮、外啮合激励和内啮合激励激振力幅值。 对式(10)进行拉式变换可得: B(g)q(g)=Fnsin(fmin+at)t (11) 式中,B(g)为系统阻抗矩阵,其逆矩阵即为系统的导纳矩阵或传递函数D(g): D(g)=[B(g)]-1=[mg2+cg+kb+ km+ku]-1 (12) 将式(12)中的g用jω替代,即可得到系统的频响函数D(ω)为: D(ω)=[B(ω)]-1=[-mω2+jcω+kb+ km+ku]-1 (13) 将式(13)代入式(11)即可得系统激励、响应和频响函数的关系为 q(ω)=D(ω)F(ω) (14) 故在激励F(ω)作用下系统各构件的振动位移qn(ω)为: (15) 式中,j,n分别为系统激励输入点和振动位移输出点。 啮合激励是行星传动系统振动和噪声产生的基本原因。齿轮系统作为一种弹性的机械系统,在啮合过程中由于啮合齿对数的变化、轮齿受载变形、齿轮误差等引起啮合激励的产生,必然导致系统的振动,故研究啮合激励对行星传动系统振动的影响,可为降振减噪、改善动态性能提供依据。 对行星传动系统而言,激励与振动响应复杂,但工程实践证明,多个激励共同引起的振动均可分解为若干单一激励振动响应的叠加。故在仅考虑啮合激励对系统振动响应的影响时,可由式(10)分别将内外啮合激励沿啮合线方向作用于系统振动微分方程中,若取啮合刚度的平均值(激振力)为100 N,系统增速过程中内外啮合激励频率从0 Hz增至7 200 Hz,最终可由式(15)求得内外啮合激励分别作用下系统各构件振动位移情况如图4,5所示。 4.1内啮合激励对系统的影响 图4(b)为内啮合激励对行星轮振动响应,由式(5)可知各行星轮啮合相位和刚度均不同,故各行星轮振动情况不同;由于啮合激励沿啮合线作用于相应构件上且可分解为横向和扭转激励,故对系统中心构件平移振动模式影响较为显著,例如系统第1、2、6、7、8、9、11、12、14、15阶固有频率的行星轮,其中第14、15阶固有频率(1 317 Hz)的行星轮1扭转振幅达1.39×10-5m;同时对系统高阶行星轮振动模式的影响也较大,如系统第10、13阶固有频率的行星轮振动,其中第13阶固有频率(1 173 Hz)的行星轮扭转振幅达1.39×10-5m,远大于其它振动响应,振型为行星轮纯扭转,由于该阶行星轮扭转振动剧烈,振幅远大于其他构件,此时由图4(a)可知该阶行星轮剧烈振动同时引起太阳轮强烈的扭转振动,振幅达2.18×10-6m,远大于其它中心构件振幅。 内啮合激励对系统振动响应的影响,总体呈现以下趋势,对系统低阶固有频率(1~5阶)的振动响应影响较小;对系统中间段固有频率(6~15阶),其振型为中心构件平移振动模式下的中心构件横向振动、行星轮振动模式下的行星轮扭转和太阳轮扭转振动影响较大;未影响系统高阶固有频率(16~18阶),其振型均属于中心构件扭转振动模式。 (a) 中心构件振动响应 (b) 行星轮振动响应 4.2外啮合激励对系统的影响 由图5(a),(b)外啮合激励对系统振动响应的影响可知,与内啮合力相似,外啮合力也沿啮合作用线方向作用于太阳轮和行星轮上,可同时引起太阳轮和行星轮较为强烈的振动,故外啮合激励同样对系统中心构件平移振动模式和高阶行星轮振动模式影响较大,而对非固有频率处影响较小;由图5(a)中心构件振动响应可得,对系统第1、2、4、5、6、7、11、12阶固有频率的太阳轮横向振动(表2可知振型以太阳轮平移为主),第4、5、6、7阶固有频率的行星轮横向振动(由表2可知振型以行星轮平移为主),第11、12阶固有频率的内齿圈横向振动(由表2可知振型以内齿圈平移为主)影响显著,振型均属于中心构件平移振动模式,其中第4、5阶固有频率的太阳轮横向振幅达2.49×10-6m,远大于其它振动响应。外啮合与内啮合激励不同之处在于其对部分高阶中心构件扭转振动模式影响也较为显著,其第17阶固有频率(6 706 Hz)的太阳轮扭转振幅达1.33×10-6m,振型为太阳轮纯扭转。 由图5(b)所示外啮合激励对行星轮振动响应可知,与内啮合激励对行星轮振动响应的影响相似,各行星轮间振动响应情况也均不同;由于行星轮通过轴承与中心构件行星架联接且与太阳轮和内齿圈相啮合,扭转刚度仅由啮合刚度分解而来,故行星轮与中心构件的振动具有一定的相似性,均对系统中心构件平移振动模式所对应的固有频率影响较大,例如第1、2、4、5、6、7、11、12、14、15阶固有频率),其中第4、5阶固有频率的行星轮3扭转振幅达4.71×10-6m,远大于其它振动响应;与此同时,外啮合激励对系统部分高阶行星轮振动模式的影响也较大,其第13阶固有频率(1 173 Hz)的行星轮扭转振幅达1.31×10-6m,同时也引起与之相啮合的太阳轮产生较为明显的扭转振动(如图5(a)所示)。 (a) 中心构件振动响应 (b) 行星轮振动响应 外啮合激励对系统振动响应的影响,总体呈现以下趋势,对系统中心构件平移振动模式下所对应的低阶固有频率(1~5阶)响应振幅随阶数递增而增加;对系统中间段固有频率(6~15阶)其振型为行星轮纯扭转时,外啮合激励会使行星轮与太阳轮产生较为明显的扭转振动;对振型为太阳轮纯扭转的高阶固有频率(17阶),外啮合激励会引起太阳轮显著的扭转振动。在振动控制中可依据系统各阶振动响应的强弱来判断各阶主要振动构件、固有频率及振型,并可以此为依据,通过调节相关构件的设计参数来实现系统各阶固有频率及振型的主动设计,从而有效降低系统振动。 (1) 提出基于牛顿力学理论和正弦激振扫频来求解行星齿轮传动系统振动响应的方法,可得到各激励与响应的具体映射关系; (2) 低阶固有频率(1~5阶)内啮合激励影响小,外啮合激励随阶数增加而影响递增,中间段固有频率(6~15阶)内外啮合激励均对行星轮纯扭转振型影响较大,在高阶固有频率(16~18阶),内啮合未影响而外啮合激励对太阳轮纯扭转振型影响显著。 (3) 结合内激励对系统的振动响应,在振动控制中可依据振动主要成分的固有频率阶次及振型,通过系统固有频率及振型的主动设计,从而有效抑制系统振动。 [1] KAHRAMAN A,SINGH R. Non-linear dynamics of a spur gear pair[J].Journal of Sound and Vibration,1990,142:49-75. [2] AI-SHYYAB A,KAHRAMAN A.Non-linear dynamic analysis of a multi-mesh gear train using multi-term harmonic balance method: sub-harmonic motions[J].Journal of Sound and Vibration,2005,279(1/2):417-451. [3] HAN Qinkai, CHU Fulei.Dynamic behaviors of a geared rotor system under time-periodic base angular motions[J]. Mechanism and Machine Theory, 2014,78:1-14 [4] 张霖霖,朱如鹏,靳广虎,等.内激励作用下的单对齿轮振动噪声分析[J].振动工程学报,2014(6):915-919. ZHANG Linlin,ZHU Rupeng,JIN Guanghu,et al.Vibration and noise analysis of internal excitations of single pair of gears[J].Journal of Vibration Engineering,2014(6):915-919. [5] LIN J, PARKER R G. Analytical characterization of the unique properties of planetary gear free vibration[J]. Journal of Bration and Acoustics r, 1999, 121:316-321. [6] PARKER R G, WU X H, Vibration modes of planetary gears with unequally spaced planets and an elastic ring gear [J].Journal of Sound and Vibration,2010, 329:2265-2275. [7] PARKER R G. Dynamic response of a planetary gear system finite element/contact mechanics model [J]. Journal of Mechanical Design, 2000, 122:304-310. [8] AMBARISHA V K, PARKER R G. Nonlinear dynamics of planetary gears using analytical and finite element models[J]. Journal of Sound and Vibration,2007, 302:577-595. [9] WEI Sha, ZHAO Jingshan, HAN Qinkai. Dynamic response analysis on torsional vibration of wind turbne geared transmission system with uncertainty [J].Renewable Energy,2015,78:60-67. [10] 魏静,孙清超,孙伟,等.大型风电齿轮箱系统耦合动态特性研究[J].振动与冲击,2012,31(8):16-23. WEI Jing, SUN Qingchao, SUN Wei, et al. Dynamical coupling characteristics of a large wind turbine gearbox transmission system[J]. Journal of Vibration and Shock, 2012,31(8):16-23. [11] 叶福民,朱如鹏,靳广虎,等.考虑齿侧间隙的非等模数非等压力角行星齿轮系统的均载特性研究[J].振动与冲击,2015,34(11):206-211. YE Fumin,ZHU Rupeng,JIN Guanghu,et al.Load sharing characteristics of a planetary gear train system with non-equivalent modulus and pressure angle considering backlashes[J].Journal of Vibration and Shock,2015,34(11):206-211. Vibrationresponsesofplanetarygearsetsundertheinternalmeshingexcitation XUHuachao1,2,QINDatong1,ZHOUJianxing2 (1.State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400044, China; 2. College of Mechanical Mechanical Engineering, Xinjiang University, Urumqi 830047, China) A translation-rotation coupled nonlinear vibration differential equation for planetary gear sets was built based on the gear system dynamics. The natural frequencies and vibration shapes of the system were calculated and the distribution of natural frequencies and the characteristics of vibration shapes were presented. Taking into account the direct proportional relationship between the internal meshing excitation and rotating speed of the system, the sweep sine excitation was made in use to simulate the internal meshing, excitation and the corresponding vibration response was obtained by solving the dynamic differential equation. It is found there is a specific mapping relation between the excitation and response. It is also found that the internal meshing excitation has a smaller influence on the low(1~5)and high(16~18)natural frequencies, but the influence of external meshing increases along with the increase of the order of natural frequency and there is a larger influence on the sun gear rotational modes of high natural frequencies. Both the internal and external meshings have significant influence on the planetary gear rotational modes of intermediate natural frequencies(6~15). The study gives a foundation for the vibration reduction in the design of planetary gears sets. planetary gear; vibration response; meshing excitation; natural characteristics TH113 A 10.13465/j.cnki.jvs.2017.21.038 国家重点基础研究发展计划资助项目(973计划,2014CB046304) 2016-07-21 修改稿收到日期:2016-09-04 许华超 男,博士生,1990年7月生 秦大同 男,博士,教授,博士生导师,1956年11月生 E-mail:dtqin@cqu.edu.com
4 啮合激励对系统振动响应的影响



5 结 论
猜你喜欢
中国造纸(2022年8期)2022-11-24
振动与冲击(2022年21期)2022-11-21
兰州交通大学学报(2022年2期)2022-04-26
青少年科技博览(中学版)(2022年1期)2022-03-28
化工机械(2022年1期)2022-03-21
一重技术(2021年5期)2022-01-18
水电站设计(2020年4期)2020-07-16
特种结构(2019年2期)2019-08-19
电子制作(2018年10期)2018-08-04
同济大学学报(自然科学版)(2018年1期)2018-02-08