
连续旋转的光纤陀螺全温失准角快速建模与补偿方法
2017-12-02 03:02杨志怀左文龙张晓雅张书颖
中国惯性技术学报 2017年5期
杨志怀,左文龙,张晓雅,张书颖
(天津航海仪器研究所,天津 300131)
连续旋转的光纤陀螺全温失准角快速建模与补偿方法
杨志怀,左文龙,张晓雅,张书颖
(天津航海仪器研究所,天津 300131)
在全温范围内应用的光纤陀螺,其输入轴失准角随温度的变化是影响光纤陀螺惯性系统性能的重要指标之一。特别是在大角速率或者高精度应用时,失准角的变化误差甚至超过零偏漂移误差和标度因数误差。采用温度补偿技术是一种提升光纤陀螺温度性能的有效方法,其中建立精确的温度模型是关键。提出了一种连续旋转的光纤陀螺全温失准角快速建模补偿方法。基于单轴速率转台的连续旋转,可以有效识别光纤陀螺失准角在全温范围内的变化拐点,提高建模和补偿的精度。试验结果表明,某型光纤陀螺全温输入轴失准角变化约14″,补偿后全温输入轴失准角变化小于1″,精度提高了一个数量级以上。在高精度光纤陀螺惯性系统中,该方法可用于指导光纤陀螺失准角的实时温度补偿技术研究及工程实现。
光纤陀螺;输入轴失准角;温度建模;补偿
光纤陀螺是一种全固态的角速率传感器,在捷联惯性导航和旋转式惯性导航系统中得到广泛应用[1-2]。高精度光纤陀螺惯性导航系统对由温度引起的光纤陀螺输入轴失准角变化指标提出了很高的要求,是影响光纤陀螺惯性导航系统性能的重要因素之一。在全温范围内应用的光纤陀螺,特别是在大角速率或者高精度应用时,其输入轴失准角随温度变化的误差甚至超过零偏漂移误差和标度因数误差,严重制约光纤陀螺的环境适应性[3-8]。
光纤陀螺的核心角速率敏感元件是光纤环圈,它由固化胶粘结多匝光纤缠绕而成。光纤环圈的等效平面法线即为光纤陀螺的输入轴(Input Axis, IA)。理想情况下,当光纤陀螺输入轴与安装面法线即输入基准轴(Input Reference Axis, IRA)平行时,光纤陀螺的输出量最大。高精度光纤环圈通常采用全脱骨技术、多极对称绕制技术和紫外光固化胶或热固化胶。高精度光纤陀螺所用的光纤环圈长达数千米,绕制匝数可达上万匝。光纤陀螺的输入轴是每匝光纤平面矢量合成的结果。由于绕制和胶体固化的不理想,导致 IA轴与IRA轴并不重合。在全温条件下,由于光纤的不理想、光纤环绕制应力的不均匀、固化应力不均匀以及支撑结构与环圈接触面的应力不均匀等原因,导致光纤陀螺的失准角随温度发生较大的变化[9]。因此,通过对光纤陀螺全温失准角变化的准确测量可以为光纤环圈工艺改进和有效温度补偿提供依据。
通过以上分析,从机理上消除温度变化带来的光纤陀螺输入轴失准角变化难度大、成本高。采用温度补偿技术是一种有效提升光纤陀螺温度特性的方法[10],其中的关键技术点是如何建立一个精确模型。建模的精度越高,补偿后的光纤陀螺全温失准角变化就越小,这样才能普适各种温度环境。通常的光纤陀螺全温失准角建模方法是选择几个典型的温度点,分别进行测试得到各温度点对应的光纤陀螺失准角,将其作为补偿模型的输入[9,11]。这种光纤陀螺全温失准角的测试和建模方法,由于频繁操作速率转台效率低,且随着建模精度需求的提高需要增加更多的温度测试点,会大大增加测试的时间和成本。本文提出了一种基于连续旋转的光纤陀螺全温失准角快速建模补偿方法,可以有效识别失准角在全温范围内的变化拐点,无盲点地全面反映失准角随温度变化的情况。基于带温箱的单轴速率转台,在全温条件下使其单向匀速旋转即可实现失准角在单一方向上投影分量的全温测试和建模,工程实现简单易行。针对高精度光纤陀螺失准角补偿精度的需求,通过增加试验次数,还可以消除光纤陀螺零偏误差、安装误差和转台台面误差的影响,提高失准角建模精度。
基于上述方法,对某型光纤陀螺进行输入轴失准角的测试和补偿分析。试验结果表明,该型光纤陀螺全温输入轴失准角变化约14″,补偿后全温输入轴失准角变化小于1″,精度提高了一个数量级以上,有助于提高光纤陀螺惯性系统的精度和环境适应性。
1 光纤陀螺输入轴失准角测试方法
光纤陀螺的输入轴失准角及其随温度的变化主要源于光纤环圈及其支撑结构的物理特性。在失准角测试过程中,光纤陀螺的安装误差和转台台面误差会影响失准角的测试精度。基于高精度加工的六面体工装,通过多方向测量失准角投影分量的方法可以消除光纤陀螺安装误差和转台台面误差的影响[11]。
如图1所示,将光纤陀螺安装在高精度六面体工装上(统称为载体),并将其作为一个整体安装在转台台面上。设定与六面体上安装面垂直的轴为OZ轴(即为IRA轴);与OZ轴垂直的六面体中相互垂直的两个棱边轴分别为OX轴和OY轴,其与OZ轴共同构成一个直角坐标系。为保证测试精度,要求光纤陀螺安装面、六面体的安装面和其三个轴的垂直度的加工误差均在在角秒量级。光纤陀螺输入轴IA与IRA轴之间的夹角即为光纤陀螺的输入轴失准角θm。
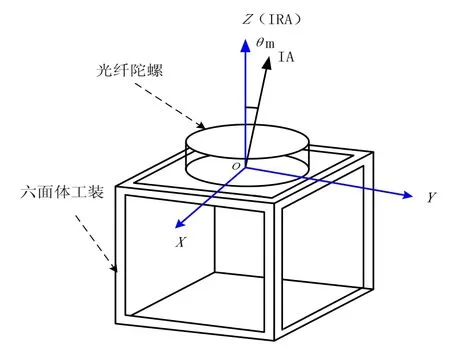
图1 光纤陀螺与六面体测试工装示意图Fig.1 Schematic of the FOG and hexahedron testing
将上述载体安装在转台台面上,使IRA轴平行于转台台面。光纤陀螺输出ΩIA与转台输入角速率Ω的关系可以表示为

式中:Ω0为光纤陀螺的固有零偏;θT为输入轴失准角在载体当前测试平面内的投影(T=x,y),其中,θx为IA在XOZ平面投影与IRA的夹角,θy为IA在YOZ平面投影与IRA的夹角。
通过采用较大输入角速率和取光纤陀螺旋转整周期输出数据的方法,可以克服地球自传的影响,提高测试精度[11]。同样在采用较大输入角速率条件下,通过加长测试时间(即取光纤陀螺旋转多圈周期输出数据平均值)的方法,亦可以克服地球自传的影响,提高光纤陀螺输入轴失准角的测试精度。在转台输入角速率Ω一定的情况下,通过测试光纤陀螺多圈旋转周期输出的平均值,由公式(1)即可以计算得到θx和θy。
利用以上测得的两个数据θx和θy,光纤陀螺的输入轴失准角可以表示为

光纤陀螺输入轴失准角误差可以分为常值误差和温度敏感误差。常值误差主要由光纤陀螺结构体安装面的平面度、六面体工装安装面的平面度、转台台面的平面度以及台面之间的安装误差等因素导致。 常值误差不随光纤陀螺的环境温度变化而发生变化。温度敏感误差是指光纤陀螺失准角随着温度的变化而变化,其主要与光纤环圈绕制、固化材料和粘结工艺等导致的环圈内部应力变化相关。
2 光纤陀螺全温失准角变化测试系统及方法
将图1所示装有光纤陀螺的六面体工装置于自带温箱的单轴速率转台上,将其IRA轴与转台台面平行。温箱温度变化曲线设置如图2所示,当单轴转台以较大的输入角速率匀速旋转时,光纤陀螺输出数据的平均值变化即反映光纤陀螺的输入轴失准角随温度的变化情况。
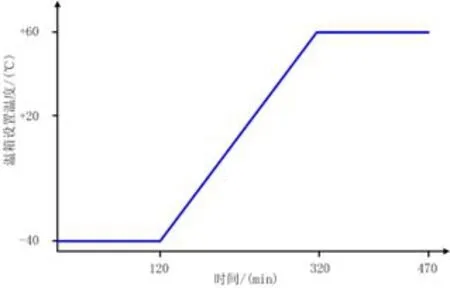
图2 温箱设置温度变化曲线Fig.2 The temperature change curve of the oven
图3所示为光纤陀螺全温失准角变化测试系统,主要包含装单轴光纤陀螺、六面体载体工装、单轴速率转台、温箱。

图3 光纤陀螺输入轴全温失准角变化测试系统Fig.3 The test system of input axis misalignment angle
2.1 全温失准角在YOZ平面投影的测试
将光纤陀螺OY轴正向朝天平行于单轴速率转台的法线方向,此时IRA轴与转台台面平行。转台速率以300 (°)/s的恒定速率单向旋转,温箱按照图2所示温变曲线设置。记录整个测试周期内的光纤陀螺输出数据。该输出数据平均值的变化即可反映光纤陀螺失准角在YOZ平面投影值随温度的变化情况。图4所示即为全温条件下,输入轴失准角的等效投影分量的变化测试曲线。
为了消除光纤陀螺零偏及地球转速的影响,设置转台以相同的角速率反向匀速旋转,测试该条件下的光纤陀螺在全温条件下的输出数据。将上述两组实验测试曲线按公式(3)计算,可以消除光纤陀螺零偏及地球转速的影响,得到全温失准角在YOZ平面的真实投影值。

其中,ΩIAy+和ΩIAy-分别表示转台正反转条件下测试的光纤陀螺输出曲线值。由于θAy1远小于 1,计算时近似取 sin(θAy1)≈θAy1,将其记为OY轴垂直转台台面方向时的第一个测试计算值。此测试状态下的θAy1包含光纤陀螺失准角在YOZ平面的投影值、转台结构误差和光纤陀螺安装误差。

图4 输入轴失准角在YOZ平面投影分量测试曲线Fig.4 The input axis misalignment angle in the YOZ plane projection component test curve
为了消除转台结构误差,将六面体绕OY轴旋转180°,重复上述测试过程,获得OY轴垂直转台台面方向时的第二个测试计算值θAy2。取上述两者的均值即可以消除转台结构误差,可以表示为

为了消除安装误差,将六面体载体绕IRA轴旋转180°,使OY轴正向朝下平行于转台输入轴。重复OY轴朝天时的2次测试过程,分别获得OY轴垂直转台台面方向的第3个θAy3和第4个θAy4测试计算值,仍然取其两者的平均值来消除此时的转台结构误差,可以表示为

最终,消除安装误差后的IA在YOZ平面内的投影分量与IRA轴的夹角随温度的变化曲线可表示为
2.2 全温失准角在XOZ平面投影的测试
将光纤陀螺绕OZ轴旋转90°,分别使OX轴正向朝上和朝下垂直于转台台面。然后按照上述 2.1中求取θy的方法进行测试和计算,得到IA轴在XOZ平面内投影分量与IRA轴的夹角随温度的变化曲线θx。
3 光纤陀螺全温失准角建模与补偿分析
根据上述测试和计算方法,图5给出了全温失准角在YOZ和XOZ平面投影的计算曲线θx和θy。
图6所示为根据公式(2)计算出的光纤陀螺输入轴失准角变化随温度的变化曲线,其中光纤陀螺输入轴失准角在全温条件下变化约14″。
从图6可以看出,上述基于连续旋转的光纤陀螺全温失准角快速建模方法可以有效识别失准角在全温范围内的变化拐点,无盲点地全面反映失准角随温度变化的情况,从而提高建模精度。针对上述测试和计算得到的数据曲线,可以采用分段式最小二乘法实现光纤陀螺全温失准角的建模和补偿。为了提高建模精度,分段的拐点可以选择在曲线的斜率拐点处,且在拐点附近减小分段补偿的间隔以提高建模精度。
选定10个分段温度点进行最小二乘法建模,图7给出了补偿后的光纤陀螺失准角变化曲线。可以看出,全温失准角变化由补偿前的14″提高到1″以内,性能提高了一个数量级以上。
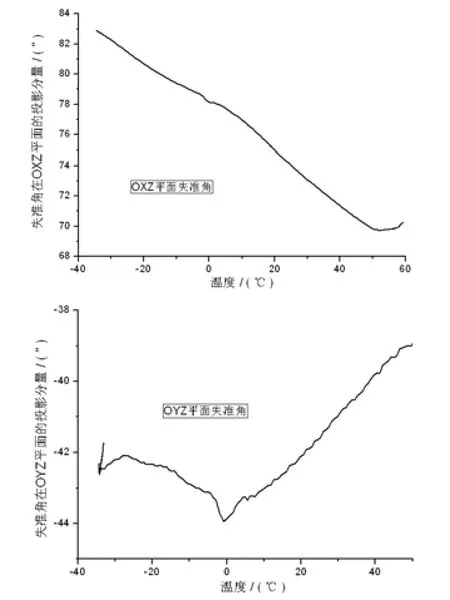
图5 失准角在YOZ和XOZ平面投影分量的计算曲线Fig.5 The input axis misalignment angel in the YOZ and XOZ plane projection component calculated curve
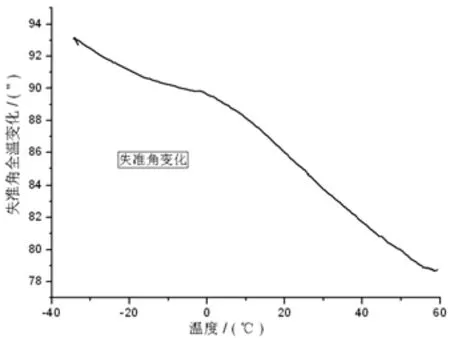
图6 补偿前光纤陀螺输入轴失准角随温度变化曲线Fig.6 The relationship curve between input axis misalignment angel and temperature before compensation

图7 补偿后光纤陀螺输入轴失准角随温度变化曲线Fig.7 The relationship curve between input axis misalignment angel and temperature before and after compensation
4 结 论
由于光纤环圈材料特性的原因,光纤陀螺输入轴失准角随温度变化而变化。这严重影响高精度光纤陀螺的工程应用效果。基于单轴速率转台的连续旋转,可以在大大提高建模效率的同时,实现全温范围内的光纤陀螺失准角变化无盲点地高精度测试,从而在分段拟合时可以精确选择分段补偿的拐点位置,使得建模和补偿的精度更高。与此同时,采用上述测试方法对不同胶体及工艺条件下的光纤陀螺进行全温失准角对比测试,可以指导光纤环圈的设计与工艺研究,从而提高光纤陀螺的工程适用性。
(References):
[1]Lefevre H C.The fiber-optic gyroscope: actually better than the ringlaser gyroscope?[C]//Proc.of SPIE, 2012, Vol.8421: 842104(1-8).
[2]Sanders S, Taranta A, Mosor S, et al.Fiber optic gyros in a highperformance, high-reliability inertial reference unit for commercial satellites[C]//Proc of SPIE.2012, Vol.8421: 842106(1-4).
[3]朱国力, 文香稳, 潘明华.三维姿态测量系统的安装误差[J].华中科技大学学报, 2011, 39(5): 1-5.Zhu G L, Wen X W, Pan M H.Installation errors of three-dimension pose measurement systems[J].Journal of Huazhong University of Science and Technology (Natural Science Edition), 2011, 39(5): 1-5.
[4] Qin S Q, Huang Z S, Wang X S.Optical angular encoder installation error measurement and calibration by ring laser gyroscope[J].IEEE Transaction on Instrumentation and Measurement, 2010, 59(3): 506-511.
[5]李岩, 张智永, 范大鹏.陀螺安装误差影响视轴稳定平台精度的机理研究[J].光电工程, 2007, 34(9): 10-15, 29.Li Y, Zhang Z Y, Fan D P.Principle of the effect of gyro misalignment on the stabilization platforms accuracy[J].Opto-Electronic Engineering, 2007, 34(9): 10-15.
[6]Chen T, Zhou W Q, Mao Z H, et al.Analysis of the gyro misalignment angle in Goniometer based on fiber optic gyroscope[J].Opitk,2016, 127(2): 769-772.
[7]Li G, Wu W Q, Fan Z F, et al.Research of misalignment between dithered ring laser gyro angle rate input axis and dither axis[C]//Proc of SPIE.2014, Vol.9297: 92971X(1-6).
[8]Li Q.Time-varying gyrocompass alignment for fiber-opitc-gyro inertial navigation system with large misalignment angle[J].Optical Engineering, 2014, 53(9): 095103(1-5).
[9]吉世涛, 秦永元, 蓝燕, 等.光纤陀螺输入轴失准角温度补偿研究[J].测控技术, 2010, 29(10): 6-8.Ji S T, Qin Y Y, Lan Y, et al.Temperature compensation research on input axis misalignment of FOG[J].Measurement & Control Technology, 2010, 29(10): 6-8.
[10]杨志怀, 张晓雅, 宋丽薇, 等.光纤陀螺标度因数迟滞模型分析与补偿技术[J].中国惯性技术学报, 2017, 25(4): 514-517.Yang Z H, Z X Y, Song L W, et al.Analysis on the hysteresis phenolmenon of FOG scale factor model and compensation technology[J].Journal of Chinese Inertial Technology, 2017, 25(4): 514-517.
[11]阳明晔, 宋章启, 张学亮, 等.光纤陀螺输入轴失准角的温度特性[J].国防科技大学学报, 2014, 36(3): 46-50.Yang M Y, Song Z Q, Zhang X L, et al.Temperature characteristics of input axis misalignment angle of fiber optic gyro[J].Journal of National University of Defense Technology, 2014, 36(3): 46-50.
Modeling and compensation method for input axis misalignment angle of FOG with continuous rotation
YANG Zhi-huai, ZUO Wen-long, ZHANG Xiao-ya, ZHANG Shu-ying
(Tianjin Navigation Instrument Research Institute, Tianjin 300131, China)
The input axis misalignment angle along with the change of temperature is one of the major indicators of fiber optic gyro inertial navigation system, especially when applied in full temperature.Its influences are more than those of bias error and scale factor error in large angular rate or high precision applications.Temperature compensation technology is an effective method to improve the temperature characteristic of fiber optic gyro.Establishing a mathematical model for temperature is the key technique.A modeling and compensation method for the input axis misalignment angle in full temperature is presented.Based on a continuous rotation method, it can effectively identify the turning point of misalignment angle in full temperature.And then the precisions of the modeling and compensation will be improved.Experiments show that the input axis misalignment angle can be reduced from 14″ to below 1″.This method can be used to guide the real-time temperature compensation research and engineering realization of the input axis misalignment angle.
fiber optic gyro; input axis misalignment angle; temperature modeling; compensation
U666.1
A
1005-6734(2017)05-0686-04
10.13695/j.cnki.12-1222/o3.2017.05.022
2017-07-15;
2017-09-20
装发部装备预研项目(41417010102)
杨志怀(1982—),男,高级工程师,研究方向为光纤陀螺及光纤传感技术、导航与控制。E-mail: yzhtj@126.com
猜你喜欢
上海理工大学学报(2021年3期)2021-07-20
家庭影院技术(2020年1期)2020-06-24
小学生学习指导(低年级)(2019年10期)2019-10-16
家庭影院技术(2019年4期)2019-04-17
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
家庭影院技术(2018年9期)2018-11-02
快乐语文(2018年36期)2018-03-12
电子制作(2017年13期)2017-12-15
人生十六七(2016年14期)2016-12-01
