夜间自然环境下荔枝采摘机器人识别技术
2017-12-04 09:15熊俊涛何志良杨振刚卜榕彬
农业机械学报 2017年11期
熊俊涛 林 睿 刘 振 何志良 杨振刚 卜榕彬
(华南农业大学数学与信息学院, 广州 510642)
夜间自然环境下荔枝采摘机器人识别技术
熊俊涛 林 睿 刘 振 何志良 杨振刚 卜榕彬
(华南农业大学数学与信息学院, 广州 510642)
利用机器视觉实现自然环境下成熟荔枝的识别,对农业采摘机器人的研究与发展具有重要意义。本文首先设计了夜间图像采集的视觉系统,然后选取了白天和夜间两种自然环境下采集荔枝图像,分析了同一串荔枝在白天自然光照与夜间LED光照下的颜色数据,确定了YIQ颜色模型进行夜间荔枝果实识别的可行性。首先选择夜间荔枝图像的I分量图,利用Otsu算法分割图像去除背景,然后使用模糊C均值聚类算法分割果实和果梗图像,得到荔枝果实图像;再利用Hough圆拟合方法检测出图像中的各个荔枝果实。荔枝识别试验结果表明:夜间荔枝图像识别的正确率为95.3%,识别算法运行的平均时间为0.46 s。研究表明,该算法对夜间荔枝的识别有较好的准确性和实时性,为荔枝采摘机器人的视觉定位方法提供了技术支持。
荔枝; 采摘机器人; 识别; 夜间图像; Hough圆检测
引言
果蔬采摘机器人已经逐步深入到农业生产[1]。开发具有视觉功能的智能果蔬采摘机器人,对于提高农业生产力有极大的应用价值与现实意义[2]。
采摘机器人的工作环境为非结构化的自然环境,在自然环境中存在着各种随机因素,因此实现自然环境下采摘机器人对目标的视觉精确定位有很大的难度[3-4]。当前采摘机器人视觉技术的研究中,因视觉定位会受到自然环境中各种因素的干扰,特别是自然光造成视觉的识别误差,因此一些采摘机器人的视觉技术研究选择在温室环境下进行[5-6]。JIANG等[7]进行了温室环境下番茄、柑橘等的识别定位研究,采用双目立体视觉技术获取温室内果蔬的三维位置信息,实验结果表明,无论在顺光或逆光环境下,该识别模型都可以识别出柑橘,正确识别率较高。文献[8-9]中温室黄瓜采摘机器人,分别对黄瓜和叶子的光谱学特性进行分析,并根据光谱学特性差异对黄瓜进行识别,实验结果表明黄瓜的识别正确率为83.3%。
在温室环境下,减弱了自然光照对视觉识别结果的影响,但是不能完全避免自然光照的影响。针对这种情况,一些研究者进行了夜间环境下采摘机器人的视觉技术研究[10-11]。LIU等[12]设计了夜间苹果的采集试验,利用BP神经网络在RGB和HSI颜色空间训练样本进行苹果图像分割,该研究有效提高了自然环境中苹果的识别,但是当苹果存在重叠情况,以及夜间产生较多阴影遮挡果实时会存在较大误差。FU等[13]进行了猕猴桃的夜间图像识别研究,通过设计夜间照明及视觉系统来采集猕猴桃的图像,在R-G颜色空间进行猕猴桃的识别,试验结构表明识别准确率达到了88.3%。
世界上有三分之一的荔枝生产自我国南方,因此进行荔枝采摘机器人的视觉研究,对农业机械自动化的发展有重要意义[14]。
已有荔枝视觉识别技术的研究主要集中在白天自然环境下,例如郭艾侠等[15]针对荔枝果与结果母枝的特点、光照与环境的特殊性及不确定性,提出了探索性分析与荔枝图像识别的融合方法。熊俊涛等[16]针对不同光照条件的荔枝彩色图像,采用Retinex图像增强和H分量旋转的方法处理后进行分割。彭红星等[17]提出了一种基于双次Otsu算法的野外荔枝多类色彩目标快速识别方法。这些研究中,荔枝视觉识别的精度很大程度受到了自然光照的影响,因此提高视觉的识别精确度,避免自然光的干扰是主要考虑因素之一。
本文在前人研究的基础上,提出夜间荔枝的视觉识别方法,为夜间荔枝采摘机器人的视觉定位提供技术支持。通过对夜间荔枝图像进行颜色特征分析,确定合适的颜色模型进行荔枝图像分割,然后结合Otsu算法与模糊C均值聚类法进行夜间荔枝果实图像分割,实现夜间成熟荔枝果实快速准确的识别,将为机器人夜间作业提供理论基础,以及为采摘机器人的智能化发展提供技术支持。
1 材料与方法
1.1 视觉系统
本研究的视觉系统由CCD摄像机、LED灯、支架等硬件组成。CCD摄像机是维视公司生产的MV-E800C型,最大分辨率为3 312像素×2 496像素。LED光源是美国CREE公司生产的XREWHT-L1-Q5型灯珠,色温5 700~7 000 K,光通量为93.9LM-100LM/W,典型视角90°,能在夜间环境下提供有效的稳定光源。荔枝图像的采集方式为:光源距荔枝果实500~1 000 mm,与摄像头位于同一垂线,平行于拍摄方向。图像采集的地点是广东省农业科学院荔枝园,时间是2016年6月25日—7月15日,荔枝品种是糯米糍,共采集526幅彩色图像,图像分辨率为2 992像素×2 000像素,荔枝图像采集视觉系统示意图如图1所示。
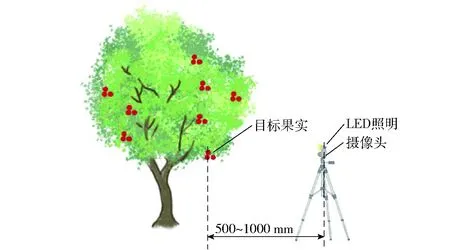
图1 荔枝图像采集视觉系统示意图Fig.1 Visual system diagram of litchi picture acquisition
为了比较白天和晚上采集的荔枝图像,使用该视觉系统在同一天分别在白天自然光照下和夜间进行荔枝图像的采集。其中,白天在自然光照条件下采集图像,夜间利用LED灯的光照条件进行图像采集并筛选出240幅白天荔枝图像和240幅夜间荔枝图像,如图2所示。

图2 白天和夜间的荔枝图像Fig.2 Litchi pictures at daytime and nighttime
1.2 果实识别算法
利用图像处理技术识别自然环境下果实的关键是确定合适的颜色模型。本研究对荔枝的彩色图像进行颜色特征分析,针对采集的白天与夜间的荔枝图像,进行颜色数据分析,根据生长环境中不同光照条件下荔枝果实、果梗、树叶、枝杆的图像数据,找出适合在夜间识别荔枝的颜色分量。然后使用所选分量对荔枝进行识别,本研究的算法流程如图3所示。
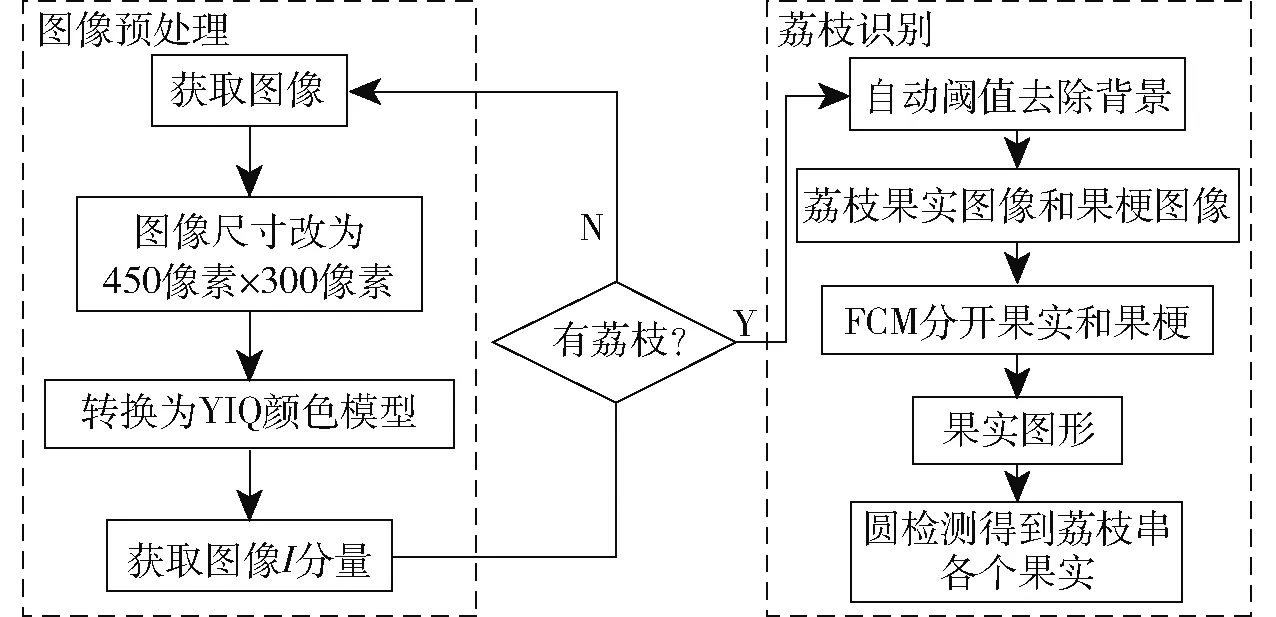
图3 夜间荔枝识别算法流程图Fig.3 Flow chart of litchi nighttime recognition algorithm
1.2.1图像数据分析
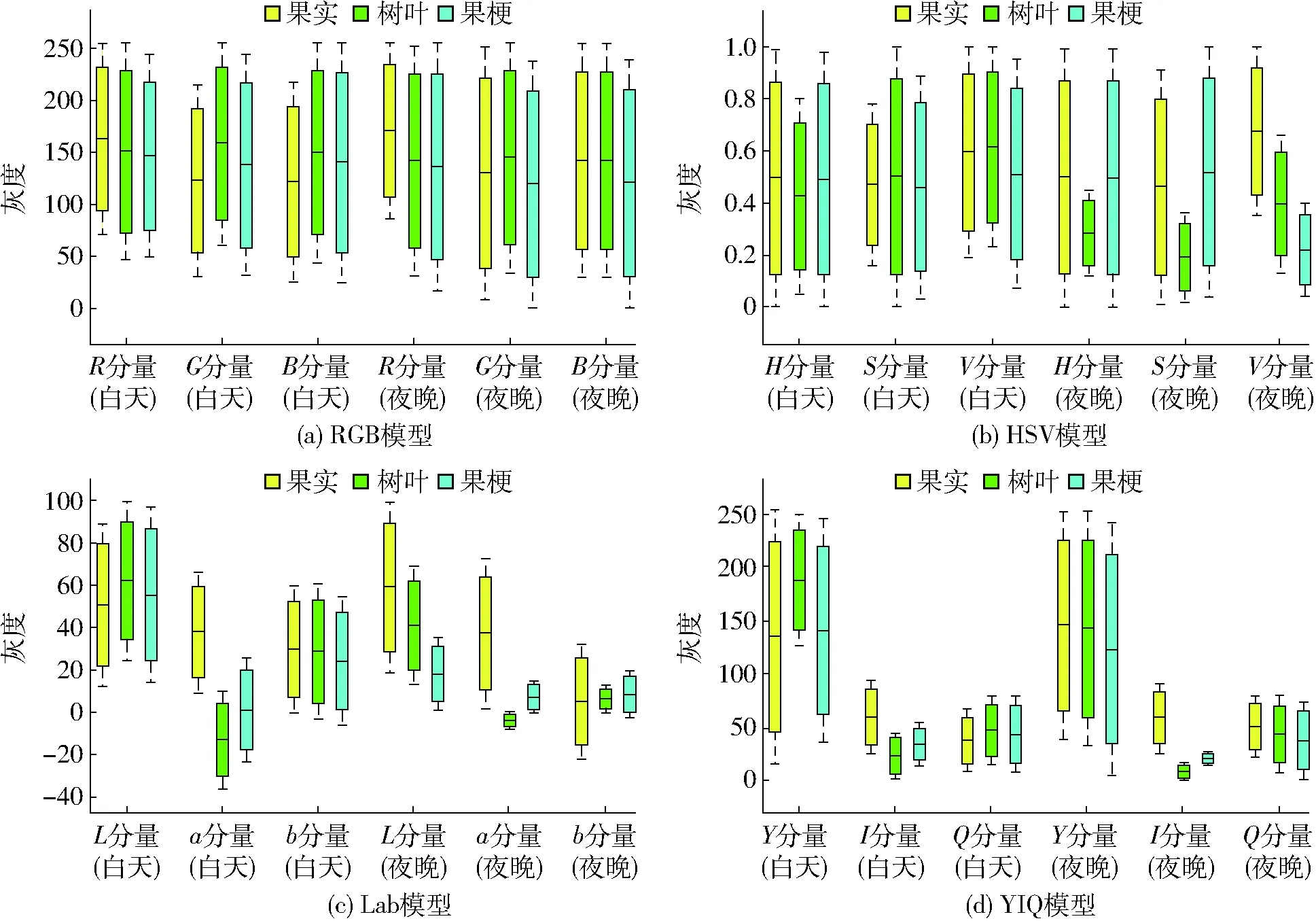
图4 荔枝不同部位在4种颜色模型下的各颜色分量箱线图Fig.4 Various color component distribution graphs of different parts of litchi in four color models
本文选取了白天和夜间的荔枝果实、果梗和树叶的图像,在不同颜色模型(RGB、HSV、Lab、YIQ)下进行对比分析,4个颜色模型的颜色分量箱线图如图4所示。由图4可以发现,因为白天背光拍的图像会变暗,顺光产生光斑,导致白天背景(树叶和果梗)灰度分布范围较广,而相比白天图像在HSV、Lab和YIQ 3个颜色模型下的特征,夜间荔枝图像中背景灰度分布范围比白天小,荔枝灰度与背景灰度的重叠部分明显比白天小。
同时对比RGB、HSV、Lab、YIQ 4个颜色模型,从图4中可发现,RGB和HSV颜色模型下,无论是白天还是夜间,荔枝与背景的灰度在3个分量下都存在很明显的重叠部分,在Lab颜色模型的a分量和YIQ颜色模型的I分量下荔枝与背景灰度重叠部分都较小,而在这2个分量下,夜晚荔枝灰度与背景灰度重叠部分又比白天小。分析夜间a分量和I分量图像特征,在夜间a分量和I分量下果梗与荔枝灰度都有一点重叠部分,但相比之下I分量更少一点,并且I分量下树叶和果梗灰度分布范围比a分量小。另外从算法的实时性分析,RGB转换为Lab颜色模型是非线性的,而RGB转换为YIQ颜色模型是线性的,选择YIQ颜色模型的算法运行速度会相对较快。综上所述,本研究选用YIQ颜色模型进行夜间环境下的荔枝识别,并对YIQ颜色模型下的颜色特征进行进一步的分析。
选择240幅夜间LED光照下的荔枝图像进行Y、I、Q颜色分量灰度的统计分析,得到了夜间荔枝果实、果梗和树叶在Y、I、Q颜色分量的灰度均值范围,如表1所示。从表1可得,夜间条件下荔枝果实I分量灰度分布区间为25~91,果梗的I分量灰度分布区间为14~26,树叶的I分量灰度分布区间为0~16,这表明夜间环境下的荔枝图像中果实与果梗、树叶的I分量灰度平均值分布区域重叠很少,比较适合进行荔枝果实图像识别的算法分割,因此本文选择YIQ颜色模型的I分量进行夜间荔枝的识别。
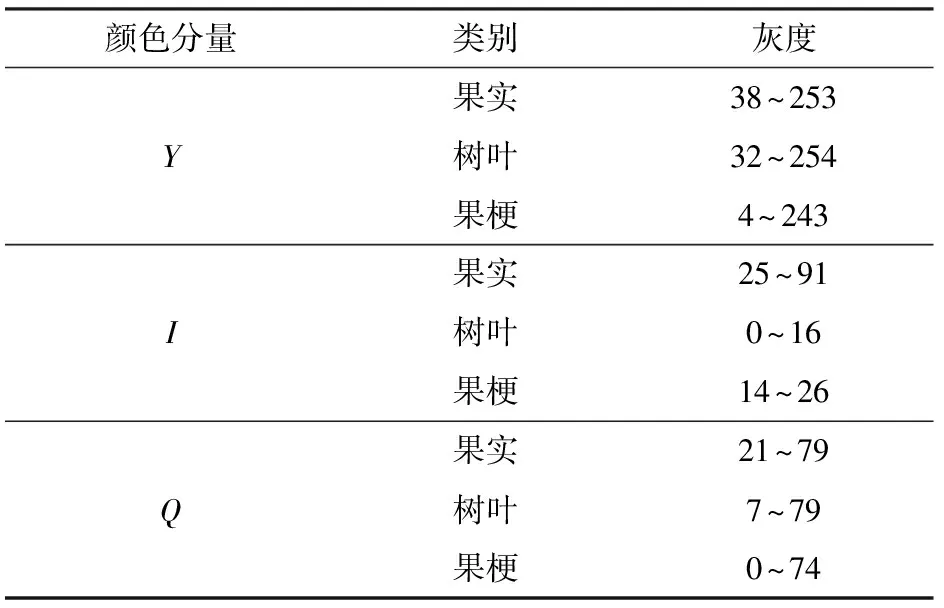
表1 荔枝不同部位的YIQ颜色模型分量灰度统计Tab.1 Grayscale range of different parts of litchi inYIQ color model
1.2.2判断图像中存在的荔枝
在图像分割之前首先要判断图像中是否有荔枝,在YIQ颜色模型中,荔枝果实、树叶、枝杆的I分量直方图如图5所示。其中图5a代表图像中存在荔枝果实的I分量灰度分布情况,图5b代表无荔枝果实图像的I分量灰度分布情况,由图5可发现,树叶、枝杆的I分量像素数主要集中在灰度小于25的区域,而灰度大于25的区域主要是荔枝果实的I分量像素数,因此,根据I分量图中灰度大于25的像素数占整个I分量图像像素数的比例来判断夜间图像中是否存在荔枝。
本文选取摄像头与目标距离在500~1 000 mm内采集的夜间荔枝图像,进行I分量直方图的分析与统计,设定I分量图像灰度大于25的像素数为a,整个I分量灰度图的像素数为b,通过对100幅夜间荔枝图像的统计,确定了当满足时,图像中存在荔枝果实。

(1)
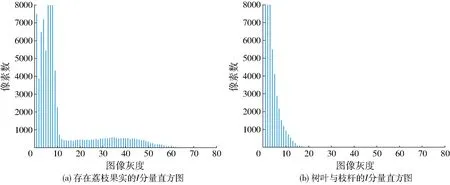
图5 YIQ颜色空间的I分量图像直方图Fig.5 Histograms of image based on I component in YIQ color model
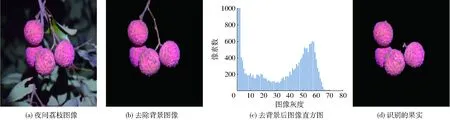
图6 夜间荔枝识别效果Fig.6 Recognition effect of litchi in nighttime
1.2.3荔枝果实的识别算法
通过分析夜间荔枝图像的灰度直方图,选择Otsu与FCM(Fuzzy C-means clustering algorithm)结合的方法进行荔枝果实的识别。其实现过程为:
(1)荔枝图像背景的去除。利用Otsu方法去除荔枝果实和果梗外的背景,获得果实与果梗图像,如图6b所示。Otsu方法的基本思路是将灰度图像分成两组并计算两组的方差,当两组之间的方差最大时,就以这个灰度为阈值分割图像[18]。
(2)利用改进的FCM方法进行图像分割,得到荔枝果实和果梗,最终得到荔枝果实图像,如图6c所示。传统的FCM算法中聚类种子数是根据图像灰度变化的,本文根据荔枝图像I分量直方图分布规律,对直方图进行波峰的检测,根据波峰数来确定种子数,如果波峰为n,则种子数为n+1。通过分析夜间荔枝果实和果梗图像,确定FCM算法的种子数,选择固定值为2,从而提高FCM算法的效率。
1.2.4Hough圆检测
对图像分割得到的荔枝果实图像进行Hough圆检测,确定果实串中的各个单独果实。Hough圆检测算法的关键是确定拟合圆的半径范围,才能实现精确快速的圆拟合[19]。为确定Hough圆拟合时半径r的取值范围,设计试验计算圆拟合半径的取值范围,其过程为:选取一颗中等大小荔枝,在距离摄像头500~1 000 mm范围内,每隔50 mm采集1幅图像,计算每幅图像中荔枝果实半径对应的像素数,最后根据半径r与深度距离d的关系

(2)
同时结合图像尺寸改变后的比例,得到最终Hough圆拟合取值的半径范围。
利用Canny算子进行荔枝果实的边缘检测,得到荔枝果实串的边缘图。然后基于式(2)进行Hough圆拟合半径取值,对得到的荔枝边缘图像进行处理,最终得到Hough圆拟合的各个荔枝果实,其中为了提高Hough变换的效率和精度,对Hough圆拟合算法进行优化,具体思路参考文献[20]。如图7所示,夜间荔枝图像的Hough圆检测结果表明此方法能准确得到荔枝串的各个果实,实现夜间荔枝果实的有效识别。
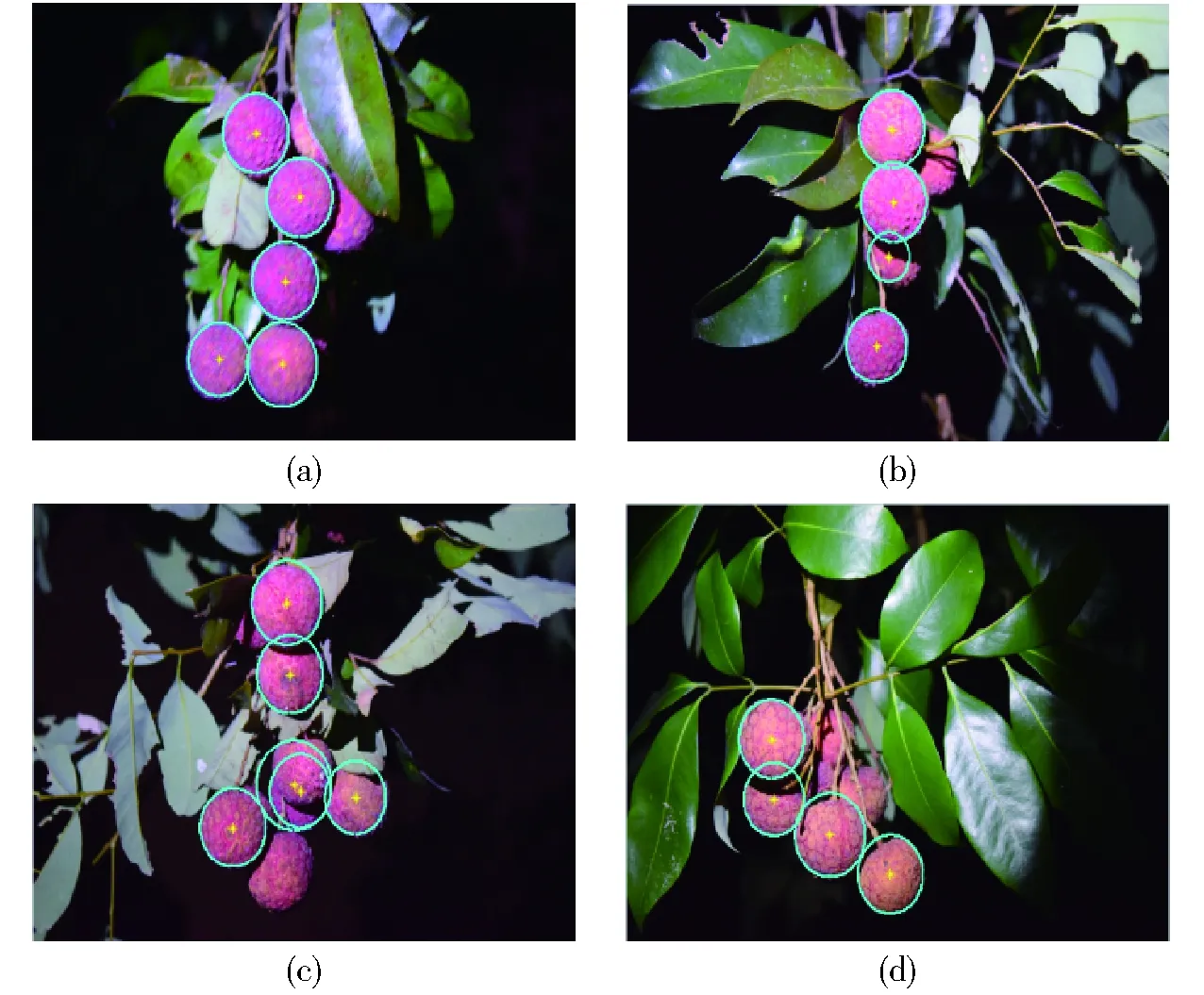
图7 Hough圆拟合结果Fig.7 Results of Hough circle fitting
2 结果与讨论
2.1 荔枝果实的识别试验
本文设计了白天和夜间的荔枝图像识别试验,随机选择夜间LED光照与白天自然光照的图像各150幅。利用本文算法进行荔枝识别试验,试验结果如表2所示。
因为荔枝是成串生长的,果实之间会存在重叠现象,因此荔枝果实图像的识别正确率不能根据荔枝果实的正确识别个数来计算。本研究计算荔枝图像中果实被准确识别的标准为:被识别的荔枝果实像素数占图像中所有荔枝果实像素数的百分比超过90%。在表2中,夜间荔枝图像中有143幅荔枝果实的识别像素数百分比超过90%,识别正确率为95.3%;以同样的方法进行白天荔枝识别准确率的计算,白天150幅荔枝图像中总共有109幅准确识别的荔枝果实图像,识别正确率为72.7%。

表2 荔枝识别试验结果Tab.2 Results of litchi recognition experiment
表2的试验结果表明:本文算法能有效判断夜间自然环境中荔枝的存在状态,指导采摘机器人进行正确有效的作业。使用同一算法在白天识别荔枝的效果没有夜间好,容易受周围环境的影响,具体原因为:①白天采集的图像中,地面的枯叶、背景中的近色物体颜色接近荔枝串,从而导致荔枝串与背景的分割误差。②顺光、逆光等不同的光照条件使荔枝串颜色改变,顺光有明显的白色光斑,逆光的果实呈黑色,均影响图像识别的准确性。在夜间环境下,周围环境的影响大大减小,被灯光照射的荔枝串与背景能明显区分,有效提高视觉识别的成功率。
夜间荔枝图像识别失败的主要原因有:①背景中如果有其它外侵光源,会影响荔枝图像的采集效果,造成识别误差,如图8所示。②目标与摄像机之间存在相对运动造成图像采集模糊,产生识别误差。而针对这些误差可以采取的改进措施有:保证夜间图像采集环境的光源单一性,以及后续研究中进行扰动目标的图像处理算法的优化。

图8 周围环境对夜间识别的影响Fig.8 Effect of environment on nighttime litchi recognition
2.2 算法性能分析
本文进行了算法性能分析,随机挑选150幅夜间图像,对本文算法和FCM算法进行性能分析,为对比2个算法分割的准确性,先对这150幅图像进行人工标记,计算荔枝像素数,再计算2种算法分割后得到的荔枝像素数,并计算2种算法的运行时间,其中部分试验数据的统计结果如表3所示。经过对试验结果的分析,用直接模糊C均值聚类分割150幅夜间荔枝图像,平均面积偏差为13.6%,平均分割单幅图像运行时间为0.57 s。用本文算法分割平均面积偏差为4.7%,平均分割单幅图像运行时间为0.46 s。
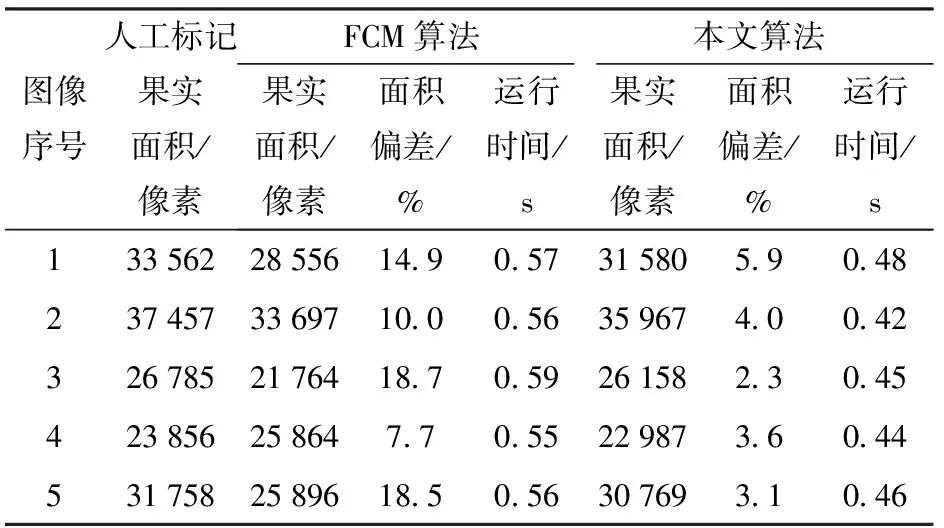
表3 算法性能分析统计表Tab.3 Statistics of algorithm performance analysis
注:面积偏差=|算法分割果实面积-人工标记果实面积|/人工标记果实面积×100%。果实面积指荔枝像素数的总和。
3 结论
(1)通过分析白天自然光和夜间LED灯光2种光照条件下采集的荔枝图像,确定了夜间荔枝识别的可行性,选取了YIQ颜色模型进行夜间荔枝识别,利用Otsu与FCM算法相结合的方法实现夜间荔枝果实的识别;设计了夜间荔枝的识别试验,结果表明识别的正确率为95.3%。
(2)对本文算法进行了性能分析,试验结果表明该算法对夜间荔枝的识别有较好的实时性,夜间荔枝图像识别的平均时间为0.46 s。
1 BAC C W, HEMMING J, HENTEN E J V. Stem localization of sweet-pepper plants using the support wire as a visual cue[J]. Computers and Electronics in Agriculture, 2014, 10: 111-120.
2 项荣, 应义斌, 蒋焕煜. 田间环境下果蔬采摘快速识别与定位方法研究进展[J/OL]. 农业机械学报, 2013, 44(11): 208-223. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20131137amp;flag=1amp;journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.11.037.
XIANG Rong, YING Yibin, JIANG Huanyu. Development of real-time recognition and localization methods for fruits and vegetables in field[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2013, 44(11): 208-223. (in Chinese)
3 BERENSTEIN R, SHAHAR O B, SHAPIRO A, et al. Grape clusters and foliage detection algorithms for autonomous selective vineyard sprayer[J]. Intelligent Service Robotics, 2010, 3(4): 233-243.
4 熊俊涛, 邹湘军, 刘念,等.基于机器视觉的荔枝果实采摘时品质检测技术[J/OL]. 农业机械学报,2014,45(7):54-60. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140709amp;flag=1amp;journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.07.009.
XIONG Juntao, ZOU Xiangjun, LIU Nian, et al. Fruit quality detection based on machine vision technology when picking litchi[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(7):54-60. (in Chinese)
5 BULANON D M, KATAOKA T. Fruit detection system and an end effector for robotic harvesting of Fuji apples[J]. Agricultural Engineering International: the CIGR Journal, 2010, 12(1): 203-210.
6 井利民, 何东健, 张建锋. 基于ARM 的苹果果实图像识别与定位技术研究[J]. 微计算机信息, 2009, 25(20): 87-89.
JING Limin, HE Dongjian, ZHANG Jianfeng. Research on technologies of apple fruit image recognition and location based on ARM[J]. Microcomputer Information, 2009, 25(20): 87-89. (in Chinese)
7 JIANG Huanyu,PENG Yongshi,YING Yibin. Measurement of 3-D locations of ripe tomato by binocular stereo vision for tomato harvesting[C]∥2008 ASABE International Meeting, ASABE Paper 084880,2008.
8 YUAN Ting, LI Wei, FENG Qingchun, et al. Spectral imaging for greenhouse cucumber fruit detection based on binocular stereovision[C]∥2010 ASABE International Meeting, ASABE Paper 1009345, 2010.
9 纪超, 冯青春, 袁挺,等. 温室黄瓜采摘机器人系统研制及性能分析[J]. 机器人, 2011(6): 726-730.
JI Chao, FENG Qingchun, YUAN Ting, et al. Development and performance analysis on cucumber harvesting robot system in greenhouse[J]. Robot, 2011(6): 726-730. (in Chinese)
10 赵德安, 刘晓洋, 陈玉,等.苹果采摘机器人夜间识别方法[J/OL].农业机械学报,2015,46(3):15-22.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150303amp;flag=1amp;journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.03.003.
ZHAO Dean, LIU Xiaoyang, CHEN Yu, et al. Image recognition at night for apple picking robot[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2015,46(3):15-22. (in Chinese)
11 项荣, 段鹏飞.番茄采摘机器人夜间照明系统设计与试验[J/OL].农业机械学报,2016,47(7):8-14.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160702amp;flag=1amp;journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.07.002.
XIANG Rong, DUAN Pengfei. Design and experiment of night lighting system for tomato picking robot[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(7):8-14. (in Chinese)
12 LIU Xiangyang, ZHAO Dean, JIA Weikang, et al. A method of segmenting apples at night based on color and position information[J]. Computers and Electronics in Agriculture, 2016,112: 118-123.
13 FU Longsheng, WANG Bin, CUI Yongjie, et al. Kiwifruit recognition at nighttime using artificial lighting based on machine vision[J]. International Agriculture and Biological Engineering, 2015(4):52-59.
14 熊俊涛, 邹湘军, 陈丽娟,等. 荔枝采摘机械手果实识别与定位技术[J]. 江苏大学学报:自然科学版, 2012, 33(1): 1-5.
XIONG Juntao, ZOU Xiangjun, CHEN Lijuan, et al. Fruit recognition and positioning technology of litchi picking manipulator[J]. Journal of Jiangsu University: Natural Science Edition, 2012, 33(1): 1-5. (in Chinese)
15 郭艾侠, 邹湘军, 朱梦思,等. 基于探索性分析的荔枝果及结果母枝颜色特征分析与识别[J]. 农业工程学报, 2013, 29(4):191-198.
GUO Aixia, ZOU Xiangjun, ZHU Mengsi, et al. Color feature analysis and recognition for litchi fruits and their main fruit bearing branch based on exploratory analysis[J]. Transactions of the CSAE, 2013, 29(4):191-198. (in Chinese)
16 熊俊涛, 邹湘军, 王红军,等. 基于Retinex图像增强的不同光照条件下的成熟荔枝识别[J]. 农业工程学报, 2013, 29(12):170-178.
XIONG Juntao, ZOU Xiangjun, WANG Hongjun, et al. Recognition of ripe litchi in different illumination conditions based on Retinex image enhancement[J]. Transactions of the CSAE, 2013, 29(12):170-178. (in Chinese)
17 彭红星, 邹湘军, 陈丽娟,等. 基于双次Otsu算法的野外荔枝多类色彩目标快速识别[J/OL]. 农业机械学报, 2014, 45(4):61-68.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140410amp;flag=1amp;journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.04.010.
PENG Hongxing, ZOU Xiangjun, CHEN Lijuan, et al. Fast recognition of multiple color targets of litchi image in field environment based on double Otsu algorithm[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(4):61-68. (in Chinese)
18 OTSU N. A threshold selection method from gray-level histograms[J]. IEEE Transactions on Systems Man and Cybernetics, 1979, 9(1): 62-66.
19 GALAMBOS C, KITTLER J, MATAS J. Gradient-based progressive probabilistic Hough transform[J]. IEEE Vision Image and Signal Processing, 2002, 148(3): 158-165.
20 黄永林, 叶玉堂, 陈镇龙,等. 一种新的快速Hough变换圆检测方法[J].电子测量与仪器学报,2010,24(9): 837-841.
HUANG Yonglin, YE Yutang, CHEN Zhenlong, et al. New method of fast Hough transform for circle detection[J]. Journal of Electronic Measurement and Instrument, 2010,24(9): 837-841. (in Chinese)
VisualTechnologyofPickingRobottoDetectLitchiatNighttimeunderNaturalEnvironment
XIONG Juntao LIN Rui LIU Zhen HE Zhiliang YANG Zhen’gang BU Rongbin
(CollegeofMathematicsandInformatics,SouthChinaAgriculturalUniversity,Guangzhou510642,China)
Fruit and vegetable production occupy an important position in agriculture with wide market and huge economic benefit. Currently, due to the diversity of picking object, most of fruit harvesting in our country depends on manual work. It’s not only time-consuming, but also technic-demanding. The labor cost of harvesting tends to occupy one-third to one-half of the whole labor cost in fruit production process. Thus, fruit harvesting robot needs to be developed to increase the efficiency and lower the costs. Since the working task of harvesting robot grows in natural environment with various shapes and complex structure, visual system needs to be built to recognize the target. This article focusing on litchi picking process, a visual system for litchi images was built and used to recognize litchi. Firstly, a visual system for litchi picture acquisition was built and a method of nighttime litchi recognition and picking point calculation was proposed. For comparison, pictures of same cluster of litchis were captured at daytime with different natural illumination and nighttime with artificial illumination. By analyzing color features of same litchi picture in different color models, the YIQ color model was proved to be the model with best practicability for nighttime litchi recognition and picking point calculation. The background of nighttime picture was firstly removed using Otsu algorithm, then fruit was segmented from stem using Fuzzy C-means clustering algorithm. Circle detection was performed to recognize fruits respectively using Hough circle fitting method. The experiments showed that nighttime litchi recognition accuracy was 95.3% with the average recognition time of 0.46 s, and the method for litchi recognition at night time had better accuracy and higher real-time. This research provided technical support for visual localization technology of litchi picking robots. Based on machine vision, the recognition of litchi fruit was realized. It could provide technical support for litchi picking robot, bring practical significance with high harvest efficiency and low labor cost.
litchi; picking robot; recognition; nighttime image; Hough circle detection
10.6041/j.issn.1000-1298.2017.11.004
TP391.41
A
1000-1298(2017)11-0028-07
2017-04-07
2017-04-30
国家自然科学基金项目(31201135、31571568)、广东省科技计划项目(2015A020209123)和广州市科技计划项目(201506010081)
熊俊涛(1981—),男,副教授,主要从事农业机器人和智能设计与制造研究,E-mail: xiongjt2340@163.com
猜你喜欢
岭南音乐(2022年4期)2022-09-15
北京航空航天大学学报(2022年6期)2022-07-02
中国机械工程(2022年8期)2022-05-09
儿童时代·幸福宝宝(2021年1期)2021-03-29
天津医科大学学报(2021年1期)2021-01-26
小资CHIC!ELEGANCE(2019年40期)2019-12-10
中国(俄文)(2019年8期)2019-08-24
意林·全彩Color(2019年4期)2019-05-11
自动化学报(2017年5期)2017-05-14
艺术评鉴(2017年1期)2017-03-24