
风帆助航船舶自启发评价迭代滑模航向控制
2017-12-06 06:45沈智鹏张晓玲
哈尔滨工程大学学报 2017年11期
沈智鹏, 张晓玲
(大连海事大学 信息科学技术学院,辽宁 大连 116026)
风帆助航船舶自启发评价迭代滑模航向控制
沈智鹏, 张晓玲
(大连海事大学 信息科学技术学院,辽宁 大连 116026)
针对风帆助航船舶运动模型具有时变非线性和受海洋环境扰动作用的特点,本文提出一种带自适应启发评价的模糊非线性迭代滑模航向控制方法。该方法采用双曲正切函数构造系统状态的迭代滑模函数,利用滑模面反馈设计控制增量,避免了对系统未知项和外界扰动的观测,并结合模糊系统对滑模控制参数进行优化,增强控制器的自适应性。通过定义一种控制舵角抖振观测变量与自适应启发评价函数,对所构建模糊系统的结构参数进行动态调节和优化,以进一步降低控制舵角的抖振作用。应用“文竹海”号散货船数学模型进行控制仿真,结果表明所设计控制器能有效地处理模型参数摄动和海洋环境扰动,控制性能良好,具有强鲁棒性。
风帆助航船; 航向控制; 自适应启发评价; 模糊系统; 迭代滑模; 控制器设计; 舵角; 抖振; 鲁棒性
风帆助航船舶运动系统具有强不确定性和时变非线性特点,数学模型比较复杂,精确建模困难。滑模控制对系统模型或参数不确定性、外界干扰都具有不变性特点,是一种带有强鲁棒性的非线性控制方法,可以尝试用于风帆助航船舶运动非线性系统的控制研究。文献[1-3]针对船舶航迹跟踪问题,设计滑模控制器,并仿真验证了它们的有效性。为改善控制效果,文献[4]改用指数趋近律,在非线性模型基础上设计了滑模控制器。文献[5]利用微分单调性与高阶滑模构造二阶航迹跟踪控制器,应用于气垫船的控制仿真,控制输出曲线平稳光滑,且具有较强鲁棒性能。
滑模控制具有良好控制特性的同时,也伴随着抖振问题。近年来,随着智能控制技术的发展,学者们探索将先进智能技术应用于滑模控制中,以抑制切换振颤提高滑模控制性能。文献[6]结合模糊控制和指数滑模控制两种方法的优点,当信号误差较大时采用指数趋近律形式以加大控制响应速度,而误差变小时,则转换为模糊滑模控制,以达到减小控制抖振的目的。文献[7]利用径向基神经网络逼近船舶运动模型的不确定项和外界扰动,在Serret-Frenet坐标系下,提出一种船舶路径跟踪神经网络滑模控制器。但针对风帆助航船舶的运动控制,以上控制方法存在参数较多、处理复杂等问题,实际工程应用较为困难。为减少控制算法的复杂度,文献[8]提出一种线性递归滑模控制方法,采用高效递推公式计算出控制量,但该方法仅适用于仿射线性系统,对于MMG分离型船舶运动非仿射非线性系统,则需要对数学模型进行线性处理。文献[9-11]则提出一种非线性迭代滑模控制方法,并应用于欠驱动船舶和水下航行器的航向、航迹跟踪等控制问题,仿真验证了控制器有效性,该方法无需对模型进行线性化处理,但该方法中的控制滑模参数是人为设定的,控制器缺乏自适应特性。为此,文献[12]采用模糊逻辑对控制器主要参数进行在线优化,设计出一种模糊自适应非线性迭代滑模控制器,但该控制器的模糊系统规则是采用专家经验事先确定的静态模糊规则,存在一定局限性。
本文将针对风帆助航船舶航向保持控制问题,在文献[12]基础上,利用模糊系统对迭代滑模控制器参数进行自适应调节,并借鉴文献[13]的启发评价学习方法,提出一种带自适应启发评价的模糊非线性迭代滑模控制器。将以远洋散货船“文竹海”号为控制对象,在海洋环境扰动下进行船舶自启发评价迭代滑模航向控制仿真,并与PID控制器、迭代滑模控制器的仿真结果进行对比分析。
1 风帆助航船舶运动模型描述
基于MMG分离模型思想[14],结合文献[15-16]中的四自由度帆船模型,将风帆助航船舶运动惯性数学模型描述为
(1)
式中:X、Y表示船在X、Y方向上的受力,N表示艏摇力矩,L表示横摇力矩,下角标H、P、R、wind、wave、S分别表示裸船体、螺旋桨、舵、风、波浪以及风帆。u、v分别为纵荡和横荡速度,r、p为艏摇和横摇角速度。m为船舶质量,mx、my为附体坐标系中x轴和y轴的附加水质量。Ixx、Izz为惯性坐标系中x轴和z轴的转动惯量。Jxx、Jzz则为附体坐标系中x轴和z轴的附加转动惯量。
由文献[15]可知,式(1)中风帆前进方向推力XS、横漂方向受力YS、艏摇力矩NS、横摇力矩LS均与风帆特性及环境因素密切相关,因此风帆的引入对船舶运动模型的时变性与不确定性等产生影响,进而使模型描述进一步复杂化。为了方便描述风帆助航船舶航向的控制问题,可以将式(1)中的数学模型描述为如下非仿射系统:
(2)
式中:ψ为航向角,δ为舵角,d(ψ,t)表示风浪、风帆等环境和不确定干扰项,f(r,δ,t)为对控制舵角δ可连续偏导的未知光滑函数项。
2 风帆助航船舶航向控制器设计
2.1迭代滑模控制器的设计
由于风帆的引入会增强风帆助航船舶模型的非线性与不确定性,与普通船只相比,风帆助航船舶运动的控制更为困难,传统线性控制方法很难满足性能要求。为解决上述问题,可将船舶航向控制问题转化为标量零阶系统的镇定控制问题,以船舶航向的反馈跟踪误差ψe为目标,设计非线性迭代滑动模态为
(3)

当模型中f(r,δ,t)与d(ψ,t)均未知时,本文控制算法直接采用滑模面的反馈值s2来求取控制量的变化率,控制律描述为
(4)
式中ks、ε∈R+。

(5)
由式(3)对s2进行展开可得
(6)

NR=h(x)cosδsinαR
(7)
式中:h(x)是一个恒正的复合函数;αR是有效冲角,其幅值与输入舵角δ有关,且同号。当δ∈(-35°,35°)时,可得NR对δ求导恒大于零。故根据式(6)、(7)可得

(8)
(9)
综合式(5)、(8)、(9)即可得
(10)
根据Lyapunov稳定性定理可得,在式(4)的控制舵角作用下,风帆助航船舶系统(2)的航向跟踪误差ψe是渐近收敛的,并最终趋于零。
2.2带自启发评价的非线性迭代滑模控制器设计
根据数学模型(1)可知,风帆船舶的横倾角与舵角有紧密的联系。为避免船舶横倾引起危险,在船舶操纵过程当中,除紧急状况可能大舵角外,通常要求操舵平稳。另受海洋环境影响,舵角输出会出现波动震荡现象,若控制器参数设计不合适,长时间工作将易造成舵机损害。为延长设备使用周期,要尽量避免或减小舵机输出抖振信号。为满足实际操舵要求,并提高操舵性能,有必要对所设计迭代滑模控制器的主要参数进行实时调节,增强系统自适应性。
由式(3)可知,迭代滑模面的收敛速度主要与参数k0~k3有关,而系统控制舵角输出则主要与滑模面反馈的控制参数ks相关,若能对上述相关参数进行实时调节,则能有效改善控制效果。为此,以航向误差与舵角控制量作为输入构造一个用于滑模参数优化的模糊系统,根据航向误差反馈值在线调节控制器的滑模参数k0~k3,使控制输出的船舶舵角保持在合理范围之内。同时,再构造一个控制参数优化模糊系统,以减小舵角输出量抖振为目标,对参数ks进行实时调节,并通过对抖振量进行测量得到一种启发评价函数输出,再进一步对模糊系统的结构参数进行动态调节和优化。最终设计出一种带自适应启发评价函数和模糊参数优化的非线性迭代滑模控制结构,如图1所示。
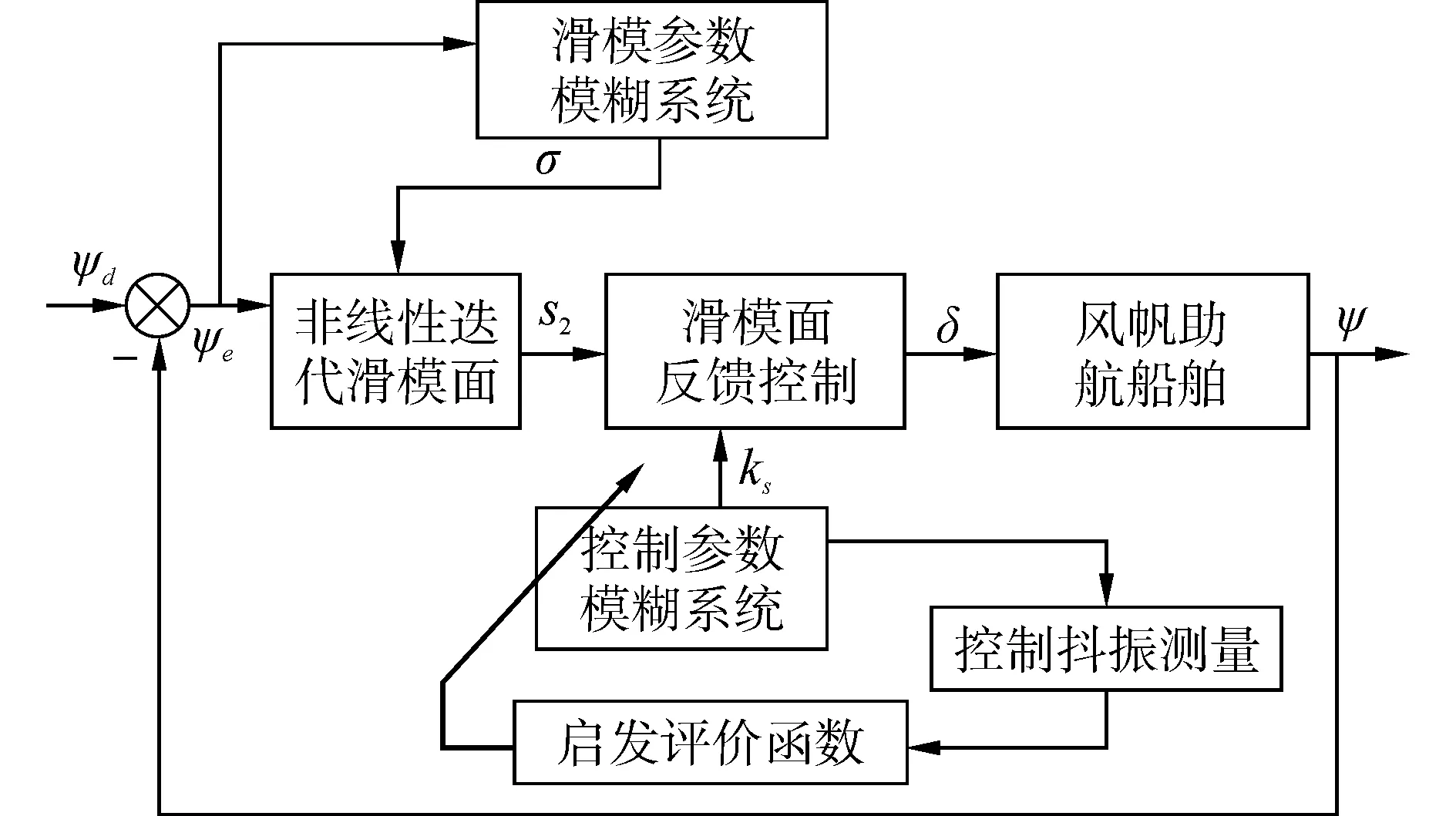
图1 带自启发评价的非线性迭代滑模控制结构图Fig.1 Nonlinear iterative sliding mode control structure with adaptive heuristic critic
2.2.1 滑模参数优化的模糊系统设计
为设计图1中的滑模参数模糊系统,可以对参数k0~k3做以下调整:
(11)

(12)
采用重心法解模糊化后可得到以下输出:
(13)
式中:ui为模糊集合的输出元素,μFRj为第j条规则的隶属函数,M是设计的模糊规则数,β表示集合NB、NS、Z、PS、PB。
2.2.2 控制参数优化的模糊系统设计
由滑模面反馈控制公式(4)可知,控制器输出量抖振通常与滑模反馈增益ks及趋近律参数ε有关,对其中的一个参数进行优化即可以达到减小控制器输出量产生的抖振的目的。其中滑模反馈控制增益ks对系统的鲁棒性和控制品质影响较大。当控制增益较大时,系统的控制输出量易产生抖振;当控制增益较小时,系统跟踪误差性能则可能降低。为进一步提高控制器性能,并考虑控制器的实际工程要求,设计一个以舵角为输入的模糊系统,用于控制参数的优化,以减小输出量抖振为目标,根据舵角抖振测量值对模糊系统的结构参数进行实时调整,进而在线优化反馈控制增益ks。


图2 模糊逻辑推理结构图Fig.2 Fuzzy logic inference structure diagram

(14)

2.2.3 控制参数模糊系统的自适应启发评价算法
式(14)需要设置的参数较多,当选定参数较为适合时,所设计的控制参数优化模糊系统可对降低抖振量起到良好效果。但各参数的需要反复试验,调节实现过程繁琐,工作量大。为此,借鉴文献[13]的自适应启发评价学习思想,对控制参数进行实时评价和优化。首先,根据模糊系统输出的误差量构建一个自适应启发评价函数,利用该函数对控制参数的优化效果进行评价;然后,利用评价结果对模糊系统的规则和结构参数进行在线调整,以进一步优化控制参数,实现减小抖振的目的。模糊系统输出的控制参数误差可定义为

(15)
式中:d∈R为预期的控制参数值,与模糊系统实际输出参数值ks进行比较,得到输出误差E。然而,预期参数d事先并不确定。由式(15)可看出,只要计算出ks-d的误差,并非一定要确定参数d的实际值,为此,定义一个能够间接评价ks-d误差的启发评价函数γk,表达式为
(16)

(17)
式中:T为仿真时间,ρk(l)的表达式为
ρk(l)=
(18)
式中:只有当控制舵角变化趋势变号时,ρk(l)设为1,否则为0。由式(17)、(18)即可反映出系统在近50个周期内的控制舵角抖振变化情况。

(19)
式中:α为设定的学习步长,zj是对应的第j条规则隶属函数。
3 仿真分析
以远洋散货船“文竹海”号为对象建立风帆助航船舶运动数学模型,参照文献[16]的船舶与风帆参数设计航向控制器。仿真过程中,选用风级在4~8级,并假设风帆处最大推力状态 (即风帆操帆为最佳攻角),且流向、流力在行驶中为恒值。
设定海上来风的风速为15 m/s,风向为130°,

图3给出了风帆助航船舶在三种控制器作用下的输出航向和控制舵角曲线对比图,图4给出了带自适应启发的迭代滑模控制器的参数变化曲线图。由图3(a)可看出,各控制器的控制速度相当,但航向保持控制精度却有一定的差异。在外界海洋环境扰动下,PID控制器无法使风帆助航船舶达到预定航向,而两种迭代滑模控制器则都能实现较好的航向保持目标。而由图3(b)可看出,三种控制器的输出舵角最大值存在较大区别,其中PID与迭代滑模控制器得到的操舵最大值都在25°左右,而带自适应启发迭代滑模控制器的输出船舶舵角峰值则小于15°,更加符合船舶的实际操作和安全要求。另外,与迭代滑模控制器相比,带自适应启发的迭代滑模控制器的输出舵角振荡幅度明显减小。

图3 三种控制器输出的航向和舵角曲线Fig.3 The course and rudder angle curves produced by three controllers

图4 自启发迭代滑模控制器的参数变化曲线Fig.4 The parameter changing curves of iterative sliding mode controller with adaptive heuristic critic

4 结论
1)相较于迭代滑模控制器,采用本文控制器时舵角振荡幅度较小,控制效果更接近实际操舵要求,且对风浪等外界干扰具有强鲁棒性。
2)所提出控制器在保证风帆助航船舶航向跟踪精度的同时,所输出控制舵角更加符合船舶的实际操作和安全要求,具有一定的理论意义与工程参考价值。
[1] YU R, ZHU Q, XIA G, et al. Sliding mode tracking control of an underactuated surface vessel[J]. IET control theory & applications, 2012, 6(3): 461-466.
[2] ASHRAFIUON H, MUSKE K R, MCNINCH L C, et al. Sliding-mode tracking control of surface vessels[J]. Industrial electronics, IEEE transactions on, 2008, 55(11): 4004-4012.
[3] 孟威, 郭晨, 孙富春, 等. 欠驱动水面船舶的非线性滑模轨迹跟踪控制[J]. 哈尔滨工程大学学报, 2012, 33(5): 585-589.
MENG Wei, GUO Chen, SUN Fuchun, et al. Nonlinear sliding mode tracking control of underatuated surface vessels[J]. Journal of Harbin Engineering University, 2012, 33(5): 585-589.
[4] 邢道奇, 张良欣. 船舶航迹跟踪的滑模控制[J].船舶, 2011,22(5): 10-14.
XING Daoqi, ZHANG Liangxin. Sliding-model control for trajectory tracking of surface vessels[J]. Ship & boat, 2011,22(5): 10-14.
[5] SIRA R H. Dynamic second-order sliding mode control of the hovercraft vessel[J]. IEEE transactions on control systems technology, 2002, 10(6): 860-865.
[6] 高键, 陈高阳. 船舶航向模糊滑模控制及仿真[J]. 江苏科技大学学报, 2010, 24(4): 372-376.
GAO Jian, CHEN Gaoyang. Fuzzy sliding mode control and simulation for ship′s course steering[J]. Journal of Jiangsu University of Science and Technology, 2010, 24(4): 372-376.
[7] 李湘平, 吴汉松, 阮苗锋. Serret-Frenet框架下的神经滑模船舶路径跟踪控制[J]. 武汉理工大学学报, 2015, 39(1): 180-184.
LI Xiangping, WU Hansong, RUAN Miaofeng. Neural sliding mode control for tracking of ships under serret-rent frame[J]. Journal of Wuhan University of Technology, 2015, 39(1): 180-184.
[8] HUANG Z, EDWARDS R M, LEE K Y. Fuzzy-adapted recursive sliding-mode controller design for a nuclear power plant control[J]. IEEE transactions on nuclear science, 2004, 51(1): 256-266.
[9] 卜仁祥, 刘正江, 李铁山. 迭代滑模增量反馈及在船舶航向控制中的应用[J]. 哈尔滨工程大学学报, 2007, 28(3): 268-272.
BU Renxiang, LIU Zhenjiang, LI Tieshan. Iterative sliding mode based increment feedback control and its application to ship autopilot[J]. Journal of Harbin Engineering University, 2007, 28(3): 268-272.
[10] 边信黔, 程相勤, 贾鹤鸣, 等. 基于迭代滑模增量反馈的欠驱动 AUV 地形跟踪控制[J]. 控制与决策, 2011, 26(2): 289-292.
BIAN Xinqian, CHENG Xiangqin, JIA Heming, et al. A bottom-following controller for underactuated AUV based on iterative sliding and increment feedback[J]. Control and design, 2011, 26(2): 289-292.
[11] 贾鹤鸣, 张利军, 程相勤, 等. 基于非线性迭代滑模的欠驱动 UUV 三维航迹跟踪控制[J]. 自动化学报, 2012, 38(2): 308-314.
JIA Heming, ZHANG Lijun, CHENG Xiangqin, et al. Three-dimensional path following control for an underactuated UUV based on nonlinear iterative[J]. Acta automatic sinca, 2012, 38(2): 308-314.
[12] 沈智鹏, 姜仲昊, 王国峰,等. 风帆助航船舶运动的模糊自适应迭代滑模控制[J]. 哈尔滨工程大学学报, 2016, 37(5): 634-639.
SHEN Zhipeng, JIANG Zhonghao, WANG Guofeng, et al. Fuzzy-adapted iterative sliding mode control for sail-assisted ship motion [J]. Journal of Harbin Engineering University, 2016, 37(5): 634-639.
[13] SHEN Zhipeng, GUO Chen. A general fuzzified CMAC based reinforcement learning control for ship steering using recursive least-squares algorithm[J]. Neurocomputing, 2010, 73:700-706.
[14] 贾欣乐, 杨盐生. 船舶运动数学模型: 机理建模与辩识建模[M]. 大连:大连海事大学出版社, 1999:49-138, 294-349.
JIA Xinle, YANG Yansheng, Ship motion mathematical model: the mechanism modeling and identification modeling[M]. Dalian:Dalian Maritime University press, 1999: 49-138, 294-349.
[15] XIAO L, JOUFFORY J. Modeling and nonlinear heading control for sailing yachts[J]. IEEE journal of oceanic engineering, 2014, 39(2): 256-268.
[16] 沈智鹏, 姜仲昊. 风帆助航船舶运动模型[J].交通运输工程学报, 2015, 15(5): 57-64.
SHEN Zhipeng, JIANG Zhonghao. Motion model of sail-assisted ship[J]. Journal of traffic and transportation engineering, 2015, 15(5): 57-64.
本文引用格式:
沈智鹏, 张晓玲. 风帆助航船舶自启发评价迭代滑模航向控制[J]. 哈尔滨工程大学学报, 2017, 38(11): 1727-1732.
SHEN Zhipeng, ZHANG Xiaoling. Iterative sliding mode control over sail-assisted ship course based on adaptive heuristic critic algorithm[J]. Journal of Harbin Engineering University, 2017, 38(11): 1727-1732.
Iterativeslidingmodecontroloversail-assistedshipcoursebasedonadaptiveheuristiccriticalgorithm
SHEN Zhipeng, ZHANG Xiaoling
(School of Information Science and Technology, Dalian Maritime University, Dalian 116026, China)
In this study, an adaptive heuristic critic algorithm based fuzzy nonlinear iterative sliding mode controller is presented for a time-varying nonlinear sail-assisted ship motion model influenced by marine environmental disturbance. The designed controller uses a hyperbolic tangent function to construct the sliding mode function of the system station. The control output is calculated through sliding surface feedback, which assists the system in avoiding the estimationof unknown parameters and external disturbances. To improve the controller′s adaptive property, the sliding mode parameters are optimized via the constructed fuzzy system. Defining a chattering variable of the control rudder and an adaptive heuristic critic function to adjust and optimize the constructed fuzzy system′s structure parameters on-line achieves a good performance in reducing the output rudder chattering. Finally, numerical simulations are conducted on the large ocean-going bulk carrier “Wen Zhuhai”, and simulation results show that the controller achieves good performance and is robust against perturbation from model parameters and marine environmental disturbances.
sail-assisted ship; course control; adaptive heuristic critic; fuzzy system; iterative sliding mode; controller design; rudder angle; chattering; robustness
10.11990/jheu.201607019
http://www.cnki.net/kcms/detail/23.1390.u.20171016.1546.006.html
TP273
A
1006-7043(2017)11-1727-06
2016-07-07.
网络出版日期:2017-10-16.
国家自然科学基金项目(61374114, 51579024);辽宁省自然科学基金项目(201602072);中央高校基本科研业务费项目(3132016311, 3132017126).
沈智鹏(1977-), 男, 教授.
沈智鹏, E-mail: shenbert@dlmu.edu.cn.
猜你喜欢
走向世界(2021年45期)2021-12-23
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
舰船电子工程(2020年4期)2020-06-19
小溪流(画刊)(2018年11期)2018-03-18
人大建设(2017年4期)2017-07-21
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
中国水运(2015年2期)2015-04-23
