
基于CMAC的飞机泵源负载模拟流量压力控制
2017-12-06 05:30雷涛锋党瑞荣西安石油大学电子工程学院陕西西安710065
电子测试 2017年21期
雷涛锋,党瑞荣(西安石油大学电子工程学院,陕西西安,710065)
基于CMAC的飞机泵源负载模拟流量压力控制
雷涛锋,党瑞荣
(西安石油大学电子工程学院,陕西西安,710065)
建立了飞机泵源负载模拟系统的数学模型,针对系统的非线性和各种不确定因素,提出了基于小脑神经网络的复合控制方法,控制器由比例-积分-微分(PID)和小脑模型神经网络控制器(CMAC)构成,该方法在传统的PID前馈控制方法上加入了CMAC神经网络快速学习算法,保证了快速实时跟进,进一步提高了控制精度。仿真结果表明,CMAC-PID能够较好解决PID在快速性和控制精度(稳定性)之间的矛盾,对抑制系统的非线性时变性具有一定效果。
负载模拟;CMAC;PID
0 引言
飞机液压能源系统作为飞机的动力核心[1],为液压功能子系统提供动力保障。该系统主要包括油箱增压系统、泵源系统、能量转换系统等。为了确保新设计的液压能源系统在原理上的正确性、合理性以及给方案设计提供试验支持,确保飞机首飞的安全[2],需要研制飞机泵源流量负载模拟系统(试验系统)来进行地面相关试验,这已成为现代飞机液压能源系统研制的必要手段。国内外都取得了一定的进展[3-4]。飞机液压能源系统随着飞机性能的不断提高不得不朝着高压大流量方向发展,高压化大功率会带来一系列问题,如无效功率的增加等。要减少无效功率必然要求液压系统采用变量泵源系统[5]。
飞机流量负载模拟系统属于电液伺服控制系统。国内一些专家对电液伺服控制系统的非线性等方面做了深入的研究,所取的研究成果具有较强的理论和应用价值[6-8],随着负载模拟器性能要求的不断提高,系统的非线性、不确定性已不容忽视。小脑模型关联控制器(CMAC)是一种模仿人小脑功能的是将网路,它是基于局部学习的神经网络,即对于输入输出的某个局部区域,只有少数几个连接权影响网络的输出。CMAC模拟非线性连续函数逼近精度高,学习速度快,适合应用与实时控制[9]。本文利用CMAC优点,设计CMAC控制算法应用于非线性时变系统中,来获得满意的快速稳定跟踪。
1 系统工作原理及数学建模
飞机泵源负载模拟系统包括飞机泵源系统和流量负载模拟系统两大组成部分,飞机泵源为流量负载模拟系统提供压力,通过流量负载模拟系统模拟飞机液压系统功能子系统在实际飞行过程中所需的流量,其流量指令谱跟踪精度和动态性能体现了其模拟液压功能子系统的能力。本文只考虑自动控制方式,即通过工控机控制比例节流阀的阀芯开口大小来模拟飞机实际系统的流量。
1.1 斜盘式轴向柱塞变量泵
斜盘式轴向柱塞变量泵输出流量连续方程为:

其中:Qs变量泵输出理论流量,Qf流量负载模拟系统所需流量,Qx流入蓄能器流量,Qv调压滑阀所需流量,Csl2变量泵泄露系数,Vs变量泵压力腔容积,Ps变量泵输出压力,Ey油液体积弹性模量, At柱塞端面积,Z柱塞个数,n泵的转速,D1油缸体上柱塞腔分布圆直径,D2斜盘最大倾角所对应的对边长度,r随动活塞到调压机构转轴的距离,Ks变量泵的等效排量梯度,xt随动活塞的位移。
动态情况下,调压滑阀阀芯动力学平衡方程为:

其中:Av调压滑阀阀芯中凸肩端面积,Kv调压弹簧的刚度系数,x0调压弹簧压缩量,Kve包括稳态液动力在内的弹簧的当量刚性系数,ωv、ξv分别为阀芯和当量弹簧的机械固有频率和阻尼系数,xv调压滑阀的位移量
随动活塞和斜盘的力学平衡方程为:

其中:Kce调压滑阀机构流量压力系数,Kt回程弹簧刚度系数,ωk、ξk随动活塞固有频率和相对阻尼系数,KQ调压滑阀流量位移增益。
1.2 蓄能器

其中:Qx流入蓄能器的流量,Vx气体体积,βx体积压缩系数,a连接处的管路直径,l与高压管路的长度,R连接管路的液阻,Ps进口压力。
1.3 插装式比例节流阀
插装式比例节流阀为三级结构,分别为比例电磁铁和先导四边滑阀、反馈弹簧和伺服活塞以及主阀芯和阀套组成前两级构成力闭环反馈。
先导级滑阀与伺服活塞公式为:

其中:Fe电磁力,i输入电流,Ke电流增益系数,Kt2反馈弹簧刚度系数,xt2伺服活塞位移量,mv2阀芯质量,Bve2油液粘性阻尼系数,Kte2包括稳态液动力在内的反馈弹簧的当量刚性系数,xv2阀芯的位移,Q3活塞的动态流量,A1、A2活塞大端和活塞杆端面面积,Cip泄露系数,Pf活塞压力,Vt2活塞左右两腔体积之和,FL主阀芯对伺服活塞的作用力,mt2活塞质量,Bt2活塞粘性阻尼系数。
主阀芯公式为:
其中:AB、AA进油口和回油口作用在主阀芯的面积,AC无杆腔有效面积,PB、PC主阀芯进油口和无杆腔油压,mv3主阀芯质量, Bve3油液粘度,Kve3当量刚性系数,QA输出流量,KQA、KCA流量位移、压力增益,GR1活塞大端流向出口的流量,GR2活塞下端流向大端流量,VC活塞大端内腔等效面积。
2 CMAC基本原理及有关算法
2.1 CMAC神经网络基本原理
CMAC是一种表达复杂非线性函数的表格查询型自适应神经网络,该网络可通过学习算法改变表格的内容,具有信息分类存储的能力。在这种技术里,每个状态变量被量化并且问题空间被化分成离散状态。量化输入构成的向量指定了一个离散状态并且被用于产生地址来激活联想单元中存储的联想强度从而恢复这个状态的信息。和BP网络一样,CMAC也可以逼近任意的非线性关系。设待逼近的函数映射关系为:

式中,dy为期望输出。
如图4所示,CMAC神经网络通过两个阶段映射来实现上述关系。
2.2 虚拟映射
S:X→A,即v = S ( X)。这一功能由CMAC网络的输入层来实现。其中是N维相联空间A中的向量。vi的值只取1或0两个值。对于某个特定的X,只有其中少数元素为1,大部分元素为零。可见 v = S ( X)实现的是一个特定的非线性映射。输入空间的一个点对应于v中的几个元素1,也即对应A中的一个局部区域。
2.3 输出映射

类似于BP网络的误差反向传播算法,CMAC神经网络的连接权学习算法为:

3 基于CMAC的控制器结构
常规PID控制器结构简单、鲁棒性强,但存在静态和动态之间的矛盾。CMAC与PID复合控制兼有两者优点,CMAC网络控制器实现前馈控制,实现被控对象的逆动态模型;常规控制器实现反馈控制,保证系统的稳定性,且抑制扰动。
CMAC采用有导师的学习算法,每一控制周期结束时,计算相应的CMAC输出 un( n ) ,并与总控制输入 u ( n)相比较,修正权值,进入学习过程。学习的目的是使总控制输入与CMAC的输出之差最小。
4 仿真分析
4.1 流量仿真曲线
CMAC-PID控制器的流量控制模式初始参数:Kp=1.0;kj=2.2;kd=0;为了考察系统的动态性能,采用的是研制要求的控制带宽5Hz的正弦谱,测试器带宽和跟踪精度,指令谱为:Q( t) = 1 05⋅[s in (2π ⋅5t - 0 .5π)+ 1 ]/2,利用软件MATLAB7.0仿真得常规PID控制策略的仿真结果见图1所示。CMAC-PID的初始控制参数PID为的控制参数、指令谱与PID一样,得到的仿真结果见图2所示。

图1 常规PID流量控制仿真图

图2 CMAC-PID流量控制仿真图
由图1可见,常规PID跟踪仿真图可以发现在大流量处和低流量处跟中曲线不光滑。泵源工作点在大流量附近时,由于输出压力很小,调压弹簧把调压滑阀阀芯往左推到最远处,航空泵的调压斜盘角最大,流量的输出大小与压力成节流方程关系,而且工作点在泵源转折点附近,非线性很大,所以常规PID在大流量处跟踪曲线不光滑。在低流量时,压力很高接近28Mpa,插装阀的主阀芯的过流面积很小,但是压力很大,流量压力的非线性关系更加明显,造成造成曲线不光滑。
由图2可见,CMAC-PID的跟踪曲线较常规PID光滑,这是因为CMAC算法在逐步替代PID的地位,在一定程度上解决常规PID快速性和稳定性的矛盾,表现形式为抑制非线性能力增强。
4.2 压力仿真曲线
进行压力控制测试时,流量指令谱为:
Q( t) = 2 8⋅[s in (2π ⋅5t + 0 .5π)+ 1 ]/2,PID控制策略的仿真结果见图3所示,CMAC-PID控制策略的仿真结果见图4所示。
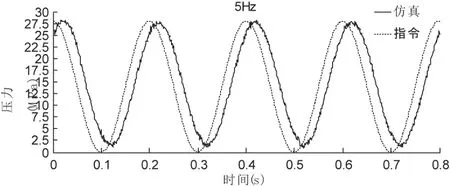
图3 常规PID压力控制仿真图
由图3可见,常规PID跟踪仿真图可以发现在高压处和低压量处跟中曲线也不光滑,原因与流量控制的原因一致。在高压时,流量压力模拟子系统和泵源工作在低流量点;在低压时,流量压力模拟子系统和泵源工作点在大流量附近,所以压力控制曲线在这个工作点也不光滑。

图4 Fuzzy-PID压力控制仿真图
参见图3和4,CMAC-PID的跟踪曲线明显比常规PID跟踪曲线光滑,快速性也比常规PID好,抑制非线性能力鲁棒性也比常规PID好。试验系统的压力跟踪快速性也达到了5Hz,验证了CMAC-PID的有效性。
5 总结
文中研究了飞机液压流量模拟子系统的CMAC-PID控制。由于液压系统存在非线性和时变性,采用常规PID不能很好的跟踪指令和抑制非线性和时变性,从这个角度出发,以推导试验系统的数学模型为基础,采样仿真来验证CMAC-PID是否有效。仿真结果表明,CMAC-PID能够较好解决PID在快速性和控制精度(稳定性)之间的矛盾,对抑制系统的非线性时变性具有一定效果。
[1]杨华勇,丁斐,欧阳小平,等.大型客机液压能源系[J].中国机械工程, 2009, 20(18): 2152-2159.
[2]周昌明.客机液压系统地面模拟试验设计探讨[J].民用飞机设计与研究, 2006(01):15-19.
[3]李广兴.电液伺服负载模拟系统通用软件研究[D].西北工业大学硕士学位论文,2004.3.
[4]刘长年.跟踪型电液施力系统优化设计理论[J].机床与液压,1979,(05):24-40+49+65.
[5]王占林.飞机高压液压能源系统[M].北京航空航天大学出版社 , 2004,11:11~16.
[6]焦宗夏,华清,王晓东,等.负载模拟器的评价指标体系[J].机械工程学报,2002, 38(11):26-30.
[7]陈刚.不确定非线性系统的鲁棒自适应控制研究[D].浙江大学博士学位论文,2006.1.
[8]王明彦.电动负载模拟技术的研究[D].哈尔滨工业大学博士论文,2004,7.
[9]Shen Z P, Guo C, Zhan X. A general fuzzified CMAC neural network and its simulation study[C]. Proceedings of the 2005 IEEE International Symposium on Intelligent Control, 2006,17(11): 1251-1256.
The CMAC for Aircraft Hydraulic Energy Load Simulator Flowpressure control
Lei Taofeng,Dang Ruirong
(School of electronic engineering, Xi’an Shiyou University, Xi’an Shaanxi, 710065)
The mathematical model of aircraft hydraulic energy systems is established. The compound control based on Cerebellar Model Articulation Controller(CMAC) is presented for nonlinear and uncertain factors of system. The controller is consist of proportion-integral- differential(PID) and CMAC, which puts CMAC algorithm in on basis of PID feedforward control strategy. The method ensure the real-time follow up and raise the control accuracy. The simulation results show that CMAC-PID control strategy can resolve the contradiction between rapidity and control accuracy of PID, besides, it has a certain effect on nonlinear time – variant of suppression.
Load ; CMAC; PID
雷涛锋(1984.8--),男,陕西西安人,硕士研究生,研究方向:自动化仪器仪表。
党瑞荣(1957.3--),男,山西原平人,教授,博导,研究方向:自动化仪器仪表。
猜你喜欢
煤气与热力(2021年7期)2021-08-23
煤气与热力(2021年6期)2021-07-28
中文信息(2021年5期)2021-03-27
铁道运营技术(2019年3期)2019-07-18
电子制作(2018年1期)2018-04-04
电子制作(2017年23期)2017-02-02
当代化工研究(2016年6期)2016-03-20
焊接(2015年1期)2015-07-18
大电机技术(2015年5期)2015-02-27
西安交通大学学报(2014年7期)2014-04-16
