
3ZT-3型中耕追肥机受力分析及运动仿真
2017-12-15 06:46迟宏伟刘宏俊赵淑红谭贺文张先民杨悦乾
农机化研究 2017年1期
迟宏伟,刘宏俊,赵淑红,谭贺文,张先民,杨悦乾
(1.黑龙江省农业机械工程科学研究院,哈尔滨 150081;2.东北农业大学 工程学院,哈尔滨 150030)
3ZT-3型中耕追肥机受力分析及运动仿真
迟宏伟1,刘宏俊2,赵淑红2,谭贺文2,张先民2,杨悦乾2
(1.黑龙江省农业机械工程科学研究院,哈尔滨 150081;2.东北农业大学 工程学院,哈尔滨 150030)
针对3ZT-3型中耕追肥机进行受力分析,确定牵引角对整机稳定性的影响;在ADAMS/View中建立基于3ZT-3型中耕追肥机的虚拟样机仿真模型,根据各构件运动状态,添加相应的约束,并对仿真模型进行检验。在仿真分析结束后选取相关点,观察分析其运动轨迹图。仿真分析结果表明:牵引角的变化量在-100~+100之间,仿形效果能够满足中耕农艺要求,该研究可为中耕追肥机的优化及后续动力学仿真分析奠定理论基础。
中耕;追肥;受力分析;ADAMS;运动仿真
0 引言
随着保护性耕作技术逐步推广,对中耕的施肥机施肥质量的要求也逐步提高[1-3]。保护性耕作要求地表有大量的残茬及秸秆覆盖,同时土壤硬度大,严重地影响了传统施肥机施肥作业稳定性[4]。若施肥机的稳定性差,不易保证施肥深度稳定,容易出现施肥过深或过浅的现象,将导致幼苗对肥料吸收不足,造成肥料浪费,降低中耕施肥作业质量[5-7]。为了提高施肥机的施肥质量,保证施肥机的稳定性,采用控制深度的机构。控制深度机构主要是电液自控仿形机构和平行四杆仿形机构,前者造价高,设计过于复杂,后者更适于在农业机械上的应用[8-11]。针对施肥机工作稳定性差等问题,根据中耕机要求,采用平行四杆仿形机构,设计出3ZT-3型中耕追肥机,可保证施肥深度一致,满足中耕农艺的要求。
为了验证3ZT-3型中耕追肥机设计的合理性,对该追肥机进行了受力分析,确定了影响施肥机稳定性的主要因素;运用ADAMS软件,建立基于3ZT-3型中耕追肥机的虚拟样机仿真模型,并对其进行运动学仿真分析,验证了设计的合理性,为下一步提高施肥机的动力学仿真分析和实际生产提供参考。
1 中耕追肥机整机机构及工作原理
3ZT-3型中耕追肥机主要由机架、仿形机构、肥箱、单体梁、松土除草部件、施肥铲及传动地轮等组成,如图1所示。该机可以进行3行施肥作业,通过前后配置除草铲,实现分层松土除草作业;通过单体两侧配置除草铲,实现在垄帮儿施肥。
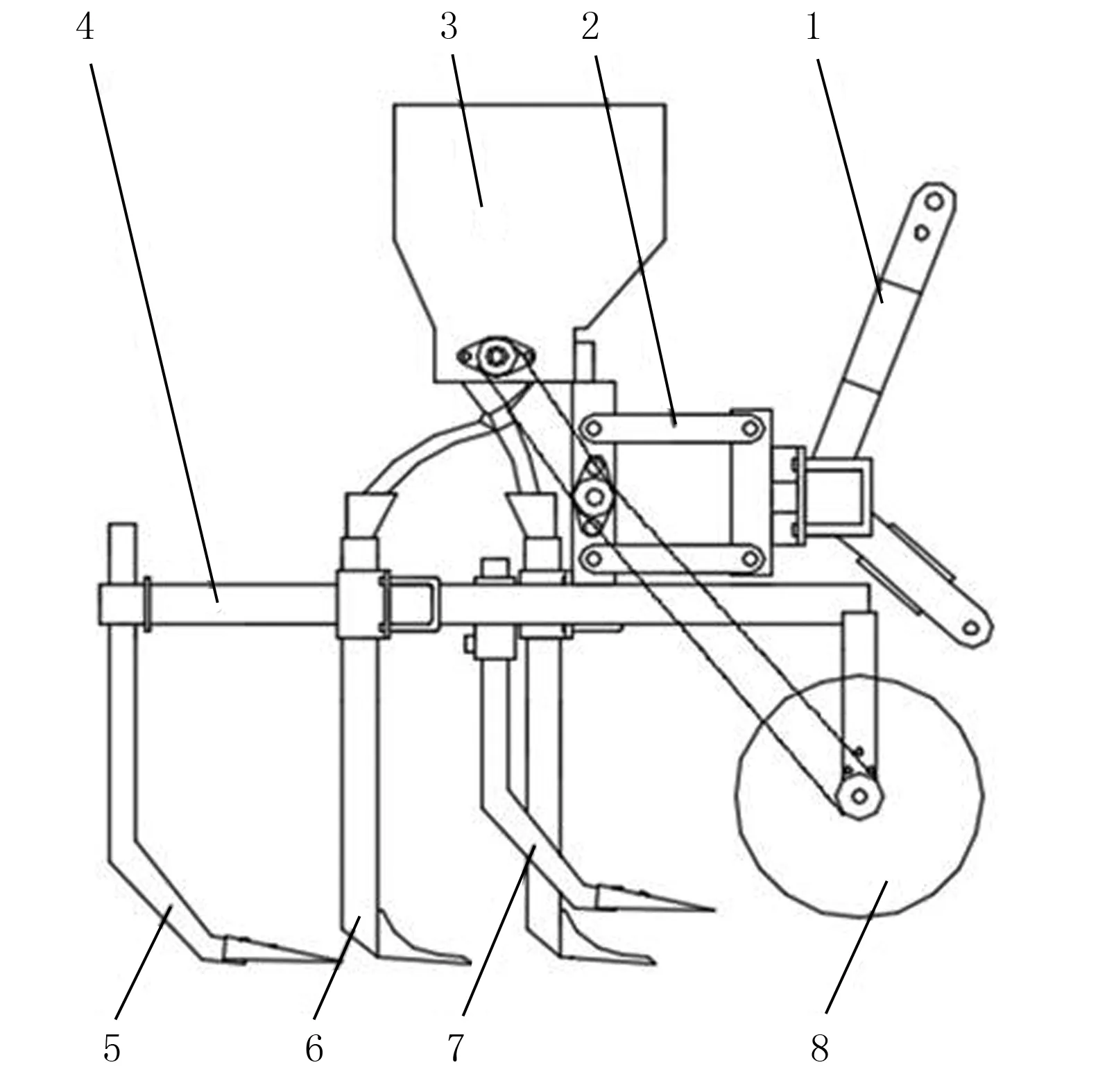
1.机架 2.仿形机构 3.肥箱 4.单体梁 5.后置松土除草铲 6.施肥铲 7.前置松土除草铲 8.传动地轮
在施肥作业过程中,平行四杆仿形机构保证施肥机单体在高低起伏的地面作业时作业深度保证稳定,控制施肥深度一致。
2 中耕追肥机整机受力分析
3ZT-3型中耕追肥机主要通过U型卡连接主梁和作业单体。在中耕作业过程中,伴随着垄沟高低不平和垄沟里秸秆覆盖不均匀等因素,机器在施肥过程中受力的大小和方向一直在变化。追肥单体中的四杆仿形机构决定着追肥机的稳定性。对3ZT-3型中耕追肥机进行受力分析,可以为主要关键部件的设计和作业可行性提供依据。该追肥机由3个施肥单体组成,工作时,3个单体的受力相同。因此,本文以1个施肥单体进行受力分析。四杆仿形的上下拉杆的受力主要集中在下拉杆。为了简化分析过程,将触土部件(松土除草铲和施肥铲)看成一个部件进行受力分析,具体分析如图2所示。图2中,M为牵引主距;Fx和Fy为牵引力在xy方向的分力;FQx和FQy为传动地轮所受的阻力在xy方向的分力;FRx和FRy为触土部件在xy方向的分力;H为各个力到仿形拉杆末端的距离。
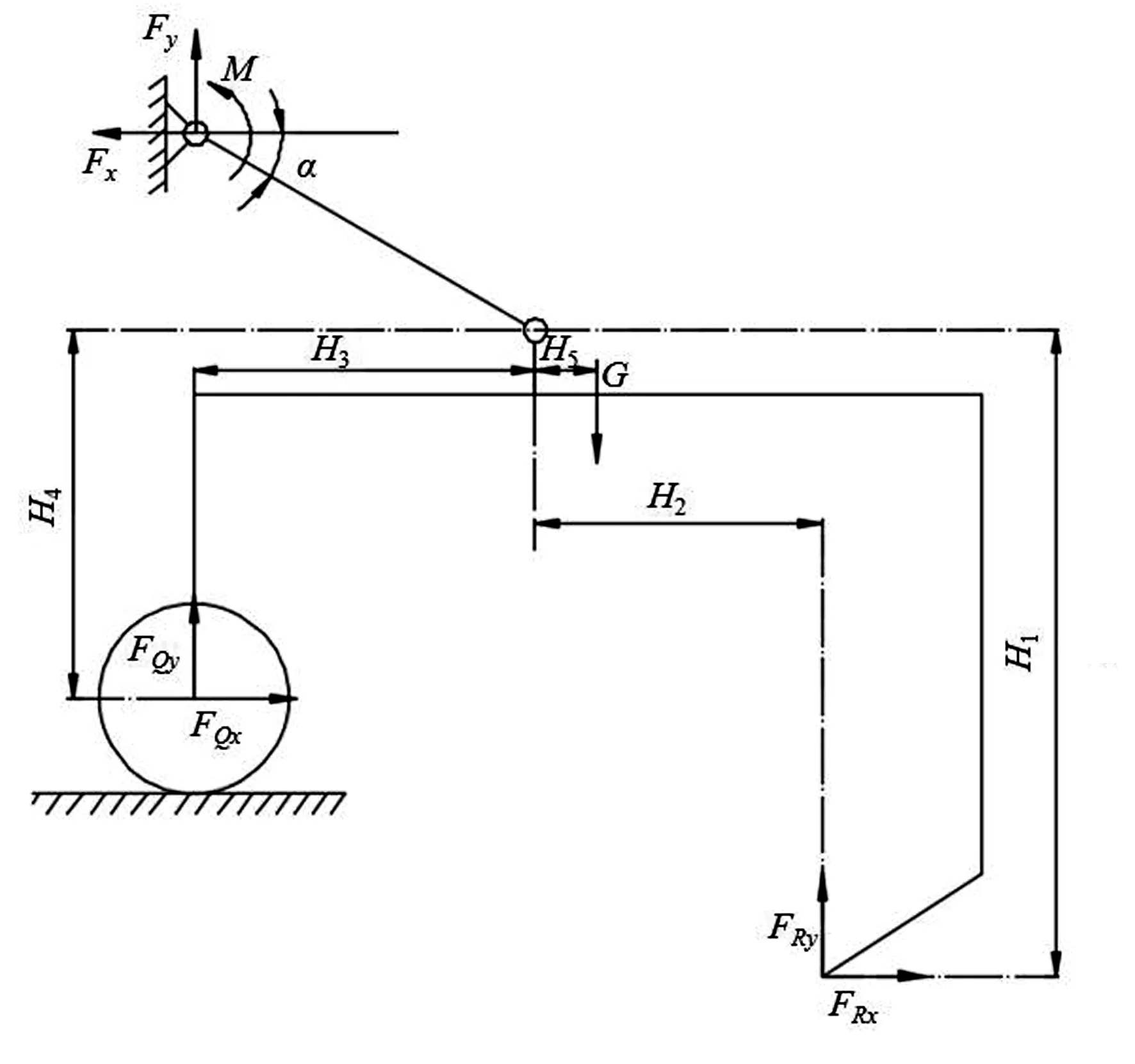
图2 追肥机的受力分析图
仿形机构的平衡条件为
Fx-FRx-FQx=0
(1)
Fy+FRy+FQy-G=0
(2)
(3)
式中 α—牵引角(°);
M—仿形机构力矩(N·mm);
G—机具重力(N)。
其中,FRx和FRy存在线性关系,FQx和FQy也存在线性关系,具体关系为
FQx=μFQy
(4)
FRx=fFRy
(5)
式中f—施肥铲与土壤的摩擦因数;
μ—传动地轮与土壤的阻力因数。
(6)
由上述公式可知:当机器的重力G和地轮的垂直反力FQy一定时,随着α的增大,FR将减少。FR与入土深度有关,FR越小,触土部件入土深度越浅。由此可知:α不易过大,应保持在一定范围内。作业时,仿形拉杆上下浮动的浮动范围小时,则FR稳定。这说明触土部件入土深度稳定,则可保证施肥深度稳定,进而增加机器的整体稳定性。
3 基于ADAMS软件的运动仿真
ADAMS软件主要针对机械系统的运动学与动力学进行仿真计算,主要由ADAMS/View模块和ADAMS/Solver模块组成。ADAMS/View模块通过自身建模或导入三维模型,采用约束将模型链接,通过装配成为系统,利用外力或者运动对其进行驱动。ADAMS/Solver模块支持多种分析类型,包括运动学、静力学和动力学分析。采用ADAMS软件设计虚拟样机进行仿真,为设计人员提供新的研发模式,可以缩短开发周期,减少产品研发成本,提高产品质量[12]。
3.1 几何建模
在保证仿真分析结果真实可靠和仿真效率的前提下,忽略与运动过程无关的因素,进而简化建模过程,建立基于3ZT-3型中耕追肥机的虚拟仿真模型。在ADAMS/View中,根据施肥机各部件的实际结构尺寸,对仿形杆、地轮和施肥单体进行参数化建模,得到相应的虚拟样机模型。地面则有相应的坐标设计点生成,可以很容易地改变模型。
3.2 施加约束和运动
在各部件建模完成后,根据各构件之间运动关系,添加相应的约束,获得相应的虚拟样机的机械系统。仿形体与机架、仿形杆与施肥单体和地轮与施肥单体采用旋转副将构件链接。机架与大地之间选择运动副,大地固定约束,机架的运动速度为6 km/h。地轮与大地之间添加线线接触约束,可以避免地轮在高低不平的地面产生脱离。虚拟仿真具体约束如表1所示。虚拟样机仿真模型如图3 所示。

表1 主要部件的约束关系
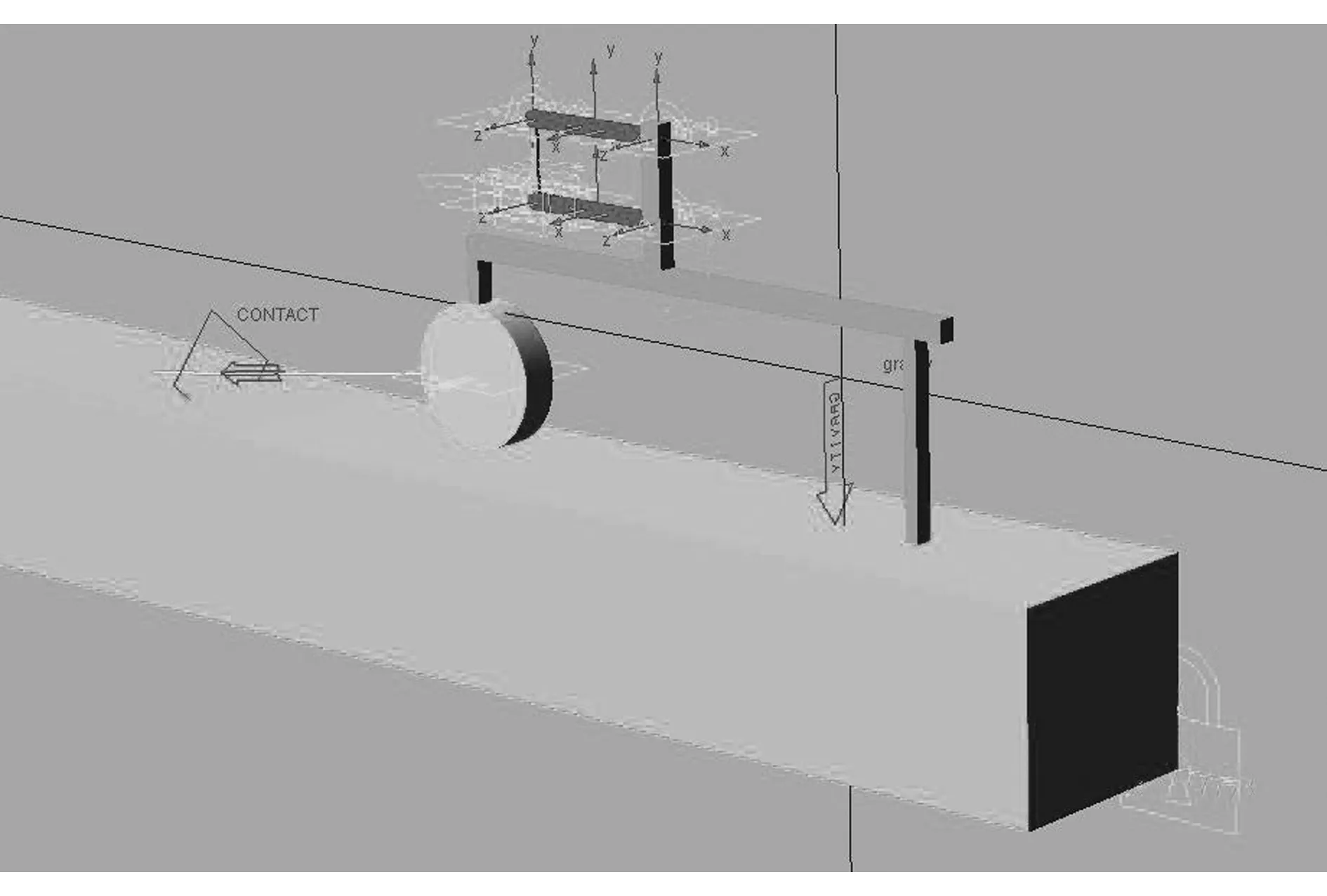
图3 虚拟样机仿真模型
3.3 模型检验
在虚拟仿真计算之前,对虚拟样机模型进行验证,确保系统的构成、系统自由度、定义质量的构件、约束等信息均正确,同时在建模过程中,也可以进行模型验证,可保证模型的准确性及虚拟仿真能完成。采用自检工具对模型进行最后的检验的结果如图4所示。

图4 模型自检信息
3.4 仿真结果分析
在虚拟仿真分析过程中,观察虚拟样机的实时工作过程,获得各个部件的运动状态。选择地轮的中心、施肥单体与开沟器接触点,生成相应的运动轨迹。由图5可知:虚拟样机中的地轮随着地面的高低起伏进行运动,施肥铲等工作部件相对于地面产生了相应的变化,表明该虚拟样机的可行性;仿形机构的仿形滞后现象低,仿形效果好,其轨迹形状更加接近于实际地形,保证了设计的合理性。
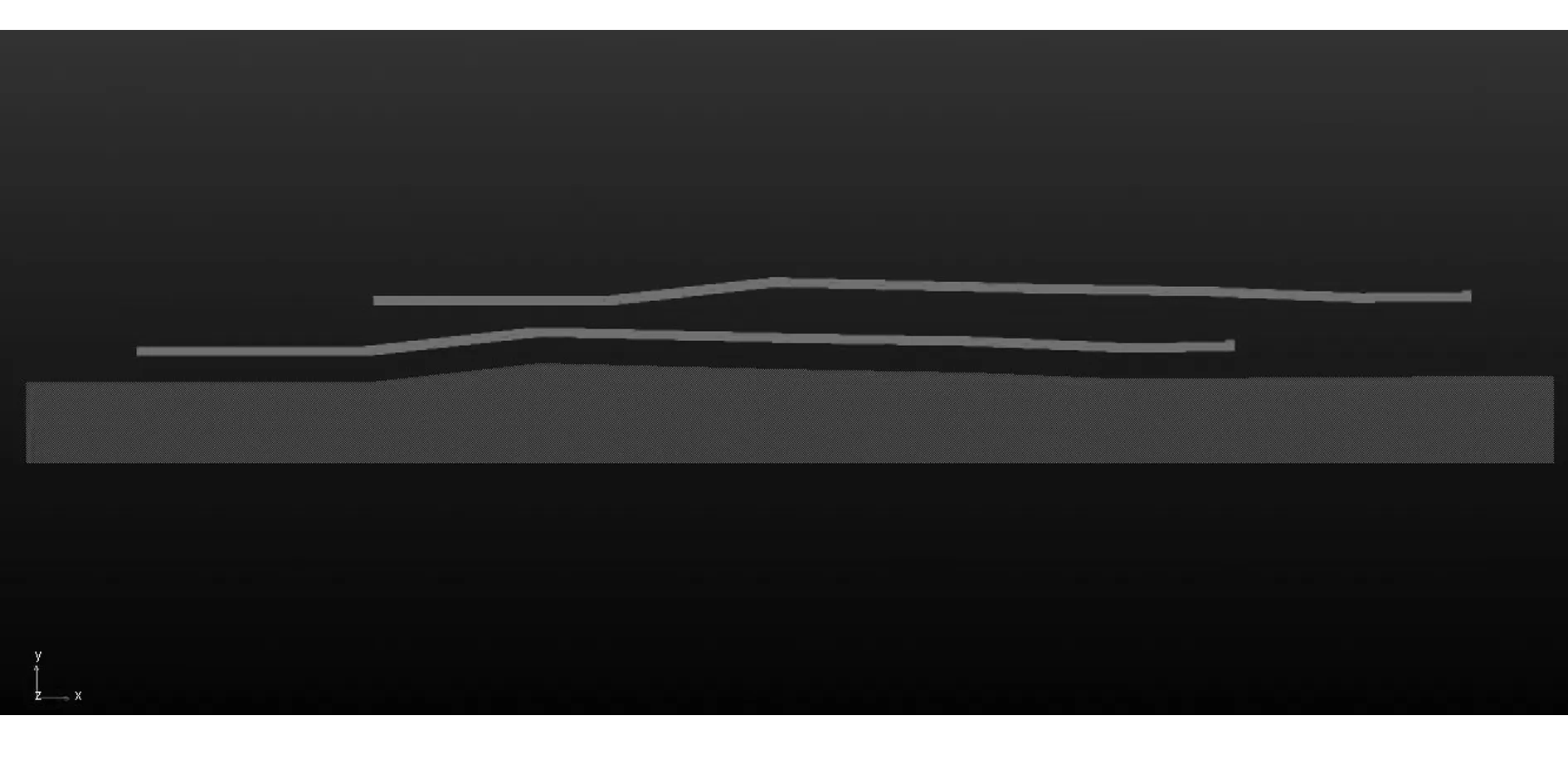
图5 运动轨迹图
图6中表示的是在仿真时间350s内,仿形杆相对于机架绕着z轴的角位移、角速度的运动变化图。由图6中可知:在仿真时间在0~275s之间时,虚拟样机地面不平整,角位移稳定在-10°~+10°之间,未出现过大的现象,满足牵引角α不易过大的要求,表明设计合理;在仿真时间在275~300 s之间时,虚拟样机在平整的稳定运行,角位移不发生变化。仿真分析结果表明:该整机的适应性好,满足设计要求。
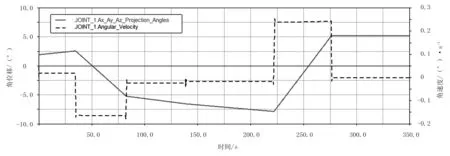
图6 施肥机运动参数曲线
4 结论
1)针对施肥机进行受力分析,确定了牵引角α是影响3ZT-3型中耕追肥机稳定性的主要因素。
2)建立了基于3ZT-3型中耕追肥机的虚拟样机仿真模型。
3)运用ADAMS软件对虚拟样机仿真模型进行仿真分析,得到牵引角的变化量在-10°~+10°之间,虚拟样机稳定性好,满足设计要求。
[1] 朱瑞祥, 张军昌, 薛少平, 等.保护性耕作条件下的深松技术试验[J].农业工程学报, 2009 (6): 145-147.
[2] 孔德军, 高焕文, 张永康, 等.保护性耕作条件下浅松作业的试验[J].农业机械学报, 2006, 37(5): 48-50.
[3] 李振.中耕追肥机施肥铲的设计与试验研究[D].哈尔滨:东北农业大学, 2014.
[4] 马永财, 张伟, 李玉清, 等.播种机单体两种仿形机构的研究[J].农机化研究, 2011, 33(8): 101-103.
[5] 王吉亮, 王序俭, 曹肆林, 等.中耕施肥机械技术研究现状及发展趋势[J].安徽农业科学, 2013 (4): 1814-1816.
[6] 吴波, 李问盈, 李洪文, 等.垄台修复中耕施肥机的设计[J].农业工程学报, 2008, 24(9): 99-102.
[7] 崔欢虎, 王娟玲, 王裕智, 等.作物苗期中耕保墒追肥机的研制与应用[J].农机化研究, 2008 (11): 91-94.
[8] 赵淑红, 蒋恩臣, 闫以勋, 等.小麦播种机开沟器双向平行四杆仿形机构的设计及运动仿真[J].农业工程学报, 2013, 29(14): 26-32.
[9] 白晓虎, 张祖立.基于 ADAMS 的播种机仿形机构运动仿真[J].农机化研究, 2009, 31(3): 40-42.
[10] 闫以勋.垄间套播冬小麦免耕播种机关键部件的研究[D]. 哈尔滨:东北农业大学, 2012.
[11] 滕悦江, 杨自栋.苗带清整型夏棉精量免耕播种机设计[J].农机化研究, 2014, 36(10): 88-91.
[12] 范成建, 熊光明, 周明飞.虚拟样机软件 MSC· ADAMS 应用与提高[M].北京:机械工业出版社, 2006.
Force Analysis and Motion Simulation of the 3ZT-3 Cultivator Fertilizer Machine
Chi Hongwei1, Liu Hongjun2, Zhao Shuhong2, Tan Hewen2, Zhang Xianmin2, Yang Yueqian2
(1.Science Research Institute of Agricultural Mechanical Engineering in Heilongjiang, Harbin 150081,China; 2.College of Engineering, Northeast Agricultural University, Harbin 150030, China)
In order to determine the traction angle influence on the stability of the whole machine, force analysis on the 3ZT-3 cultivator fertilizer machine is performed. Based on the 3ZT-3 cultivator fertilizer machine,the virtual motion simulation model is desgined by the ADAMS simulation software. Depending on each component state of motion each motion, the corresponding constraints are added, and the test simulation model is tested. After the simulation analysis ,the relevant points are selected for observing analysis of the trajectory.The simulation results show that the traction angle variation between -10°~+10° which meet the requirements of cultivating agronomy. This paper is using for the optimization of cultivator fertilizer machine.The theoretical basis of this paper is using for the subsequent dynamics simulation analysis.
cultivator; fertilizer shovel; force analysis; ADAMS; motion simulation
2016-03-10
“十二五”国家科技支撑计划项目(2014BAD11B01-02)
迟宏伟(1967-),女,黑龙江密山人,高级工程师,(E-mail)1050292909@qq.com。
赵淑红(1969-),女,哈尔滨人,教授,博士生导师,(E-mail)shhzh91@sina.com。
S224.21
A
1003-188X(2017)01-0015-04
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
农业工程学报(2022年1期)2022-03-25
装备维修技术(2021年42期)2021-03-15
农业开发与装备(2021年1期)2021-02-08
装备制造技术(2020年4期)2020-12-25
农技服务(2020年12期)2020-12-17
房地产导刊(2020年6期)2020-07-25
新农业(2019年11期)2019-11-23
新农业(2019年21期)2019-11-19
现代园艺(2018年2期)2018-03-15
