
一种变速器参数优化匹配方法研究
2017-12-19 08:54姚立纲闫晓磊任铖铖
福州大学学报(自然科学版) 2017年5期
余 捷, 姚立纲, 闫晓磊, 任铖铖
(1. 福州大学机械工程及自动化学院, 福建 福州 3501162. 福建省汽车电子与电驱动重点实验室, 福建 福州 350118)
一种变速器参数优化匹配方法研究
余 捷1, 2, 姚立纲1, 闫晓磊2, 任铖铖1
(1. 福州大学机械工程及自动化学院, 福建 福州 3501162. 福建省汽车电子与电驱动重点实验室, 福建 福州 350118)
为兼顾车辆动力性和经济性的改善, 针对变速器开展参数匹配的多目标优化设计. 利用权重法将最高车速指标、 0~60 km·h-1加速时间和1挡最大爬坡度归一化处理, 得到表征动力性的优化目标函数. 并将百公里能耗作为经济性优化目标函数, 再基于多岛遗传算法获得多目标优化问题的Parato解集. 优化计算前后显示车辆的综合性能有较好提升, 证明该优化方法较适用于车辆动力系统参数的匹配设计.
动力系统; 参数匹配; 优化设计; 遗传算法
0 引言
变速器的参数匹配对汽车的动力性和经济性有重要影响, 为此, 汽车在变速器设计上应力求参数匹配优化以获得最佳的综合性能. 考虑到车辆动力性与经济性对参数匹配是互相牵制的优化目标[1], 该优化问题属于非线性、 有约束、 多目标参数优化问题. 目前, 解决车辆多目标方法主要有传统方法和智能优化方法等[2-8]. 传统方法往往将各自目标转化为加权和单目标问题, 或者用约束法转化一些目标函数为约束条件而保留单目标来解决. 显然, 传统方法效率较高, 但较依赖设计者的经验以及无法在各种互为矛盾的目标中获得多个各有优劣的解集方案(Parato解). 为有效解决多目标优化问题, 本研究采用间接法和智能优化相结合的方法. 利用权重法将最高车速指标、 0~60 km·h-1加速时间和1挡最大爬坡度归一化处理得到动力性优化目标函数, 并将百公里能耗作为经济性优化目标函数, 再基于多岛遗传算法获得多目标优化问题的Parato解集.
1 样车整车参数及设计要求
为验证速比优化思想, 选择某城市公交车作为样车, 其基本参数及设计要求如表1所示. 其中, 所研究样车的变速器为5挡位数的机械式自动变速器(automated mechanical transmission, AMT), 其各个挡位传动比初值如表1所示. 此外, 该样车的动力性设计指标主要为: 最高车速指标 ≥ 65 km·h-1, 0~60 km·h-1加速时间 ≤ 20 s和1挡最大爬坡度 ≥ 30%.

表1 样车基本参数Tab.1 Basic parameters of the vehicle for simulation
2 联合仿真模型搭建
2.1 建立整车模型
在Cruise中建立模型并根据表1提供数据设置相应参数, 如图1所示. 该模型主要包括整车模块、 驾驶员模块、 发动机模块、 离合器模块、 变速器模块、 换挡规律控制模块、 AMT控制模块、 主减速器模块、 轮胎模块和制动模块等. 图2为模型在Cruise软件中的初步仿真, 结果显示车辆在Japan_Mode_3_MIDTOWN市区循环工况下实际车速和需求车速一致, 车速跟随性较好, 模型能够顺利进行仿真任务.

图1 整车仿真模型Fig.1 Vehicle simulation model
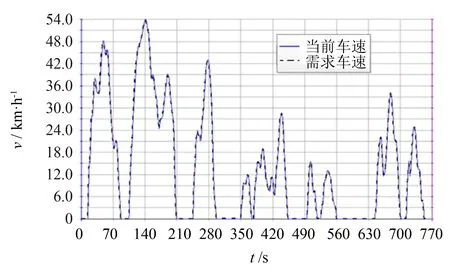
图2 Japan _MIDTOWN工况车速示意图Fig.2 Sketch of vehicle-speed under Japan_MIDTOWN
2.2 建立联合优化仿真模型

图3 联合优化流程图Fig.3 Flow chart of joint optimization
为有效解决城市公交车变速器参数优化匹配问题, 基于Isight软件平台建立联合优化仿真模型, 计算流程图见图3. 其基本思想为: 利用优化算法模块对选定的优化变量进行不断修改, 调用Cruise模型子程序进行迭代仿真计算, 并对每次计算结果进行读取和评估. 当仿真结果达到最优或较优解时, 模型终止计算和输出结果.
优化变量、 约束条件和优化目标函数的确立是优化计算的前提. 为此, 在整车仿真平台构建后, 根据优化任务以变速器各挡传动比作为优化变量, 并以动力性设计指标和相邻挡位传动比之比限定(考虑换挡平顺性需求挡位之间传动比比值小于等于2)为约束条件, 确定动力性和经济性2个目标函数的优化任务. 其中, 选择3个工况的平均百公里能耗最小可作为经济性优化目标; 而将表征车辆动力性的最大爬坡度G、 最高车速umax和加速时间t等3个指标进行权重法归一后作为优化目标. 考虑到城市公交车大部分时间是行驶在小坡度平路, 只在高架桥、 地下隧道等小部分工况需要考验爬坡能力, 因此G的权重因子取0.2; 而对于城市行驶的中重型车辆其平均车速较低,umax的权重因子取0.1; 最后,t的权重因子取0.7. 基于上述分析, 建立优化数学模型如下式.


图4 MIGA算法中子种群/岛生成原理Fig.4 Neutron population/island generating principle for MIGA algorithm
在智能优化算法方面, 选用多岛遗传优化算法(multi-island genetic algorithm, MIGA)开展优化任务. 遗传算法以生物进化为原型和效法生物进化规律, 通过对优化问题解空间的个体进行编码, 并对编码后的个体间进行遗传操作(如: 选择、 交叉、 变异等), 再经过不断迭代后从新种群中寻找含有最优解或较优解的组合. 相对于枚举, 启发式等传统优化方法, 遗传算法具有收敛性好、 计算时间少、 鲁棒性高等优点. 然而, 遗传算法局部搜索能力较差, 在进化后期搜索效率较低, 故在实际应用中容易产生早熟收敛的问题. MIGA的原理示意如图4所示, 相对于传统遗传算法而言, 其优势主要在于更优良的全局求解能力和计算效率. MIGA 的基本思想是将一个大种群分成若干个子种群——形象称之为“岛”(island), 而在每个岛上运用传统的GA算法进行子种群进化. 利用MIGA, 式(2)中的变量可以增加多样性, 避免过早收敛, 从而在全局范围内得到更优解.
3 联合优化仿真结果分析
优化目标值的变化趋势如图5所示, 两小图的横坐标均为迭代次数, 纵坐标分别为经济性目标函数值与动力性目标函数值, “+”号表示每次迭代的函数值. 图5(a)中的经济性目标值表征的是该城市公交车的百公里油耗情况; 图5(b)中的动力性目标函数值表征的是车辆在加速能力、 最高车速和最大爬坡度等3个方面的综合性能. 从仿真数据中, 获得的优化问题Pareto解如表2所示. 从表中可看出, 所推荐8种的动力系统参数匹配方案相对于原来方案而言, 在动力性和经济性方面均有提高.
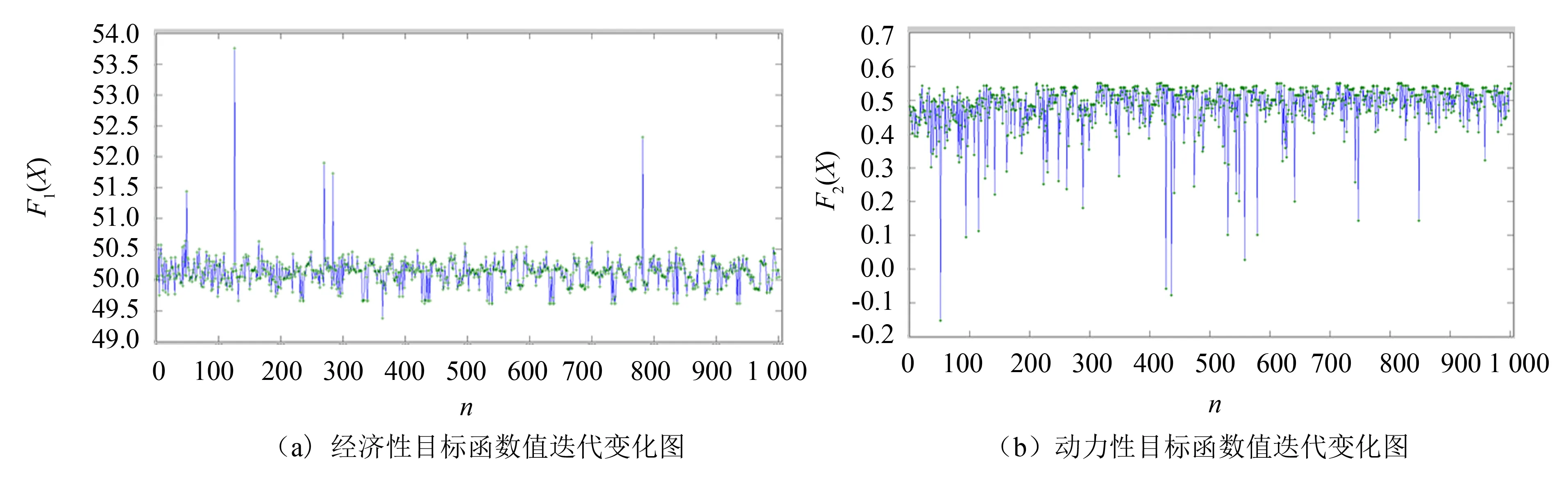
图5 2个优化目标函数值变化过程 Fig.5 Chart of optimization goals value
以表2中方案4为例, 与原来动力系统对比结果如表3所示. 5个挡位速比只需改动一点即可使经济性目标函数值由50.57下降到49.62, 同时动力性目标函数值由0.44提高到0.53. 其中, 最大爬坡度略有下降(由36.74%下降到36.47%), 但最高车速提高(由66提高到70 km·h-1)以及0~60 km·h-1加速时间由18.84减少到14.96 s. 这对市区工况下的城市公交车非常有利, 因为大部分工况对加速性能要求更好. 此外, 表2中方案8的经济性目标函数值为50.04, 以及动力性目标函数值为0.54. 显然, 方案8比方案4有更好的动力性, 但经济性能下降. 可见, 表2中的8种方案各有优缺点, 这也体现多目标优化问题将出现Parato解的现象.
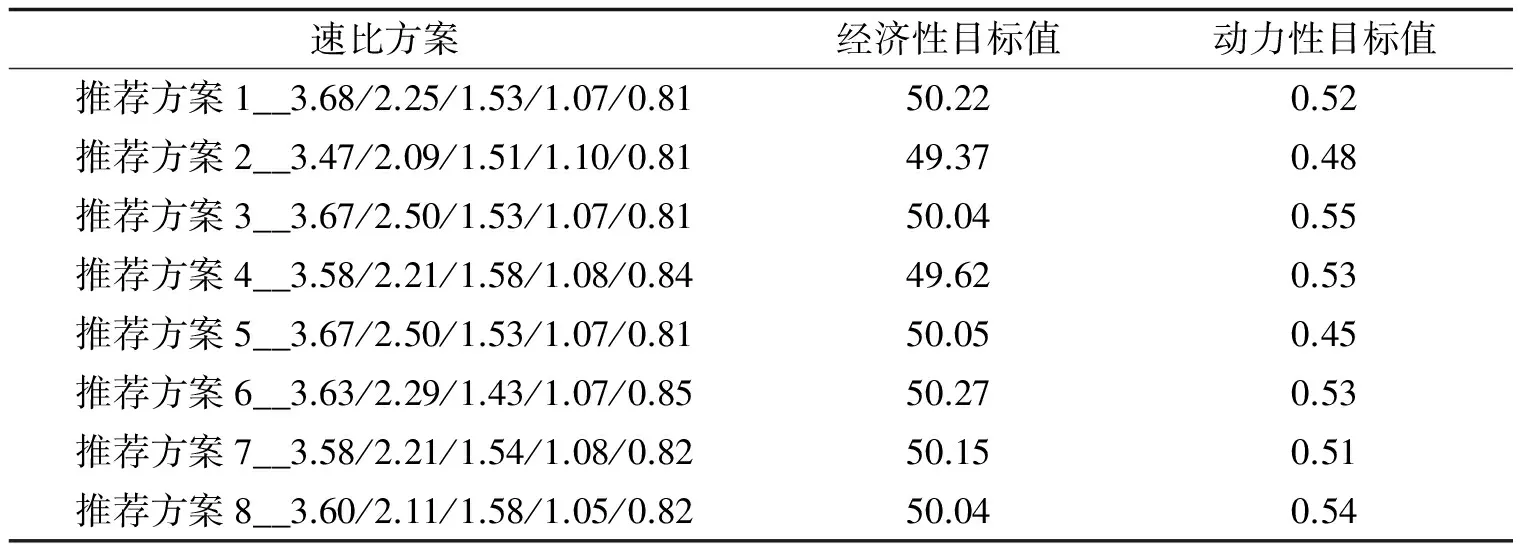
表2 Parato解Tab.2 Parato solution
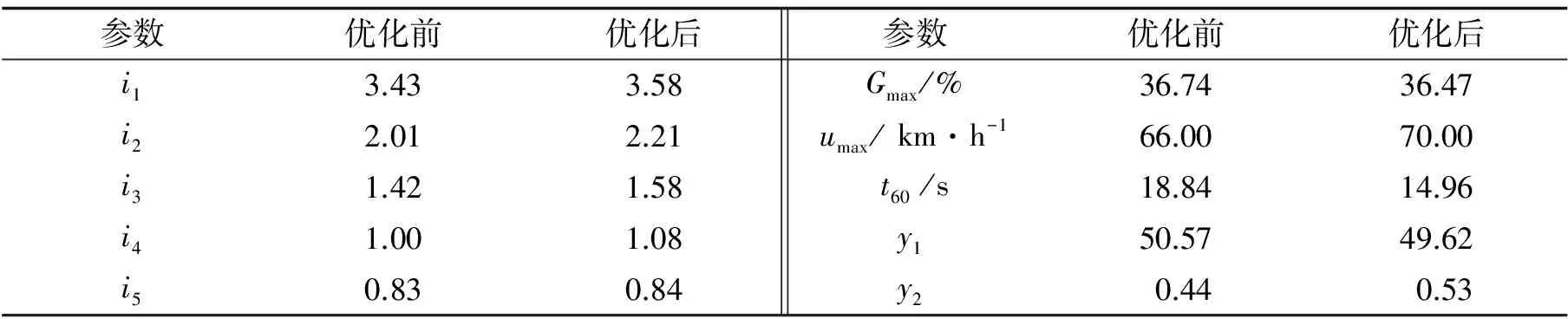
表3 优化前后对比Tab.3 Compared before and after optimization
4 结语
利用间接法和智能优化相结合的方法, 在建立多目标优化数学模型基础上开展变速器速比优化设计任务. 仿真优化结果显示, 在Japan_Mode_3_MIDTOWN市区循环工况下, 配备表2方案4传动比的样车, 综合动力性能可提高近20.5%, 同时经济性可提高1.8%. 此外, 得到表2中的8种变速器传动比方案, 从而使变速器速比参数匹配有更广的设计空间.
[1] 余志生. 汽车理论[M]. 5版. 北京: 机械工业出版社, 2009.
[2] 吴峰, 赵长禄, 朱振夏, 等. 基于DOE和遗传算法的传动系参数优化方法研究[J]. 车辆与动力技术, 2013(2): 11-15.
[3] EB K, PRATAP A, AGARWAL S,etal. Multi-objective genetic algorithm: NSGA-Ⅱ[J]. IEEE Transactions on Evolutionary Computation, 2002, 6 (2): 182-197.
[4] 刘新. 纯电动汽车动力参数匹配与仿真研究[D]. 重庆: 重庆交通大学, 2013.
[5] 陈佼. 某城市公交动力传动系匹配优化研究[D]. 南京: 南京理工大学, 2014.
[6] 王华秀, 徐勇, 杨兴明. 整车动力性经济性匹配优化设计方法[J]. 汽车科技, 2013, 3(5): 48-53.
[7] GAO B Z, LIANG Q. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle[J]. Mechanical Systems and Signal Processing, 2015, 51(1): 615-631.
[8] 张抗抗, 徐梁飞, 华剑锋, 等. 基于多目标优化的纯电动车动力系统参数匹配方法[J]. 汽车工程, 2015, 7(9): 757-764.
[9] 汪洋, 田韶鹏. 纯电动城市客车动力参数匹配与优化分析[J]. 武汉理工大学学报(信息与管理工程版), 2015, 37(6): 688-692.
[10] 尹安东, 赵韩, 杨亚娟, 等. 多目标遗传算法的混合动力传动系参数优化[J]. 中国机械工程, 2013, 24(4): 552-556.
Researchonanovelmethodfortransmissionparametersoptimalmatching
YU Jie1, 2, YAO Ligang1, YAN Xiaolei2, REN Chengcheng1
(1. School of Mechanical Engineering and Automation, Fuzhou University, Fuzhou, Fujian 350116, China;2. Automobile Electronics and Electric-drive Technology Key Laboratory of Fujian Province, Fuzhou, Fujian 350118, China)
For both the improvement of the performance and fuel economy of vehicles, the multi-goal optimal matching design for transmission ratios are carried out. In order to solve the optimization problem effectively, using the weight method to obtain dynamic performance optimal objective function from the vehicle peak speed, 0~60 km·h-1acceleration time and peak slope on 1st gear, as well as taking the fuel consumption per 100 km as the economic optimal objective function, and then to obtain Parato solution set of this multi-objective optimal problem based on the multi-island genetic algorithm. The optimal results showed that the overall performance of the vehicle has been improved, and the optimal method can be applied to solve the powertrain parameters matching design problem.
powertrain; parameters matching; optimal design; genetic algorithm
10.7631/issn.1000-2243.2017.05.0687
1000-2243(2017)05-0687-05
U463. 21
A
2016-12-18
余捷(1984-), 讲师, 在职博士生, 主要从事车辆动力总成设计研究, 95677615@qq.com
国家自然科学基金资助项目(51275092); 福建省自然科学基金资助项目(2015J05088); 福建省教育厅科研资助项目(JAT160322)
(责任编辑: 蒋培玉)
猜你喜欢
房地产导刊(2022年4期)2022-04-19
汽车实用技术(2022年4期)2022-03-07
汽车工程师(2021年12期)2022-01-17
汽车工程师(2021年11期)2021-12-21
建材发展导向(2021年15期)2021-11-05
装备制造技术(2018年8期)2018-10-17
上海师范大学学报·自然科学版(2018年3期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
广西科技大学学报(2016年1期)2016-06-22
