自动焊接机控制系统软件设计
2017-12-20 01:30乐伟伟
科学与财富 2017年29期
乐伟伟

自动焊接机控制系统采用了“IPC+多轴运动控制器”的控制结构,整个数控系统的软件主要包括基于6K4控制器的实时控制软件和基于me的系统软件:实时控制软件是在6K4控制器基本指令的基础上实现多轴的运动插补控制、后台PLC扫描、机床侧强实时信号的处理等数控功能;而采用基于COM的技术开发系统软件,完成人机界面设计、主要参数设置、各轴伺服运动状态显示等非实时性的工作,提高了软件程序的可重构能力和可重用性。
1系统总体软件结构设计
整个控制系统软件的设计主要有三大部分组成,即上位机IPC应用程序设计、系统通讯设计、下位机运动控制程序设计。其总体软件结构如图1所示。
2上位机系统软件设计
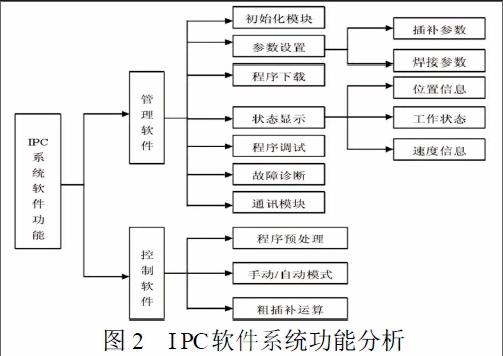
2.1 IPC软件系统功能分析
软件系统的基本功能可分为两部分:管理软件和系统控制软件。其中管理软件的功能主要包括参数设置、系统初始化、各轴状态显示、程序调试、故障诊断等模块,控制软件的功能主要由粗插补运算、自动模式运行、程序预处理等模块。系统软件功能模块组成如图2所示。
2.2上位机应用程序界面设计
上位机应用程序的主要作用就是将数控系统的操作界面展示在屏幕上方便用户的操作,这是数控系统开发很重要的一部分。经过对自动焊接机硬件系统及用户需求的分析,并结合对IPC软件系统的功能概况分析,最终利用Visual Basic6.0可视化开发工具开发了直观简洁、易操作的自动焊接机人机交互界面。
在数控系统工作时,用户只需输入简单的几个参数,就可以自动完成散热器T型管相贯线的焊接。这大大减轻了操作人员的劳动强度,提高了工作效率。另外,为方便观察和操作,在人机界面设计时尽量将焊接过程中需要关心的相关参数直观清晰的在一个界面上表达出来。
系统上位机应用程序应主要包括系统初始化、参数设置与显示、点位数据库生成及下载、原点设置和系统状态显示等模块。
系统初始化:该模块主要用于为用户提供一个交互性好的人机界面,在这个界面中,用户可以方便进行各种操作。数控系统运行时,首先运行此模块,完成用户登录、建立上位机与6K4运动控制器及嵌入式控制系统的通讯,对有关状态指示器设置相应的初始状态等工作。
参数设置与显示:针对散热器T型管相贯线数学模型生成及焊接点位数据库生成所需的各种参数,设置了以下几个人机交互接口:横管直径、立管直径、焊接运动线速度、插补周期、两把焊枪的最大摆角及其摆动速度、X轴偏移、起弧收弧时间等。用户可以通过数字软键盘方便的设置各种参数。
点位数据库生成及下载:在菜单栏中的工具选项下可以打开这个子菜单。点击生成按钮,应用程序采用直线插补方法对焊接曲线进行直线段拟合,完成上位机的对曲线的粗插补,并生成相应的各轴焊接点位数据库,在屏幕上显示出来。还可将其下载到6K4运动控制器中。当焊接散热器时运动控制器独立运行,保证了对焊接过程中各种参数的实时控制。当下载完成时,系统会提示用户下载成功,可以返回主界面,完成下一步工作。
原点设置模块:通过机床面板上的手动控制按钮,分别对Y轴、Z轴、R轴坐标位置进行手动设置,使两把焊枪均到达焊接起弧位置。然后可通过机床面板上的确定按钮保存当前设定的焊枪在焊接起弧位置时各轴的相对坐标原点,以方便工件的连续自动焊接。也可对当前保存的相对原点坐标值进行微调。硬件原点按钮是指使焊枪回到由各轴正负限位开关及原位开关(由接近开关组成)决定的硬件安装原点位置。
系统状态显示:通过工业以太网接口,上位机系统可以通过API函数访问6K4
运动控制器,读取各轴的当前坐标位置和运动速度,并在界面上进行实时显示。同时系统还可对当前IPC系统和6K4控制器之间的连接状态进行监控显示。
3下位机焊接运动程序设计
T型管相贯线的粗插补由上位机完成,而精插补及各轴伺服系统的插补联动控制则由6K4运动控制器来完成。6K4运动控制器是建立在Compumotor的6000编程语言的可靠平台之上,带有强大的特色,例如:电子凸轮,多任务处理,PLC掃描模式,可编程限位开关(PLS)功能,仿形和教学模式等,而且6000语言具有与Basic相似的结构,简单易用。在本系统的设计中主要用到了6000语言的多任务处理功能、后台PLC扫描功能、位置跟随功能、注册运动功能、三轴直线插补运动功能、PLS功能等。用语言开发的焊接运动程序的主要功能是调用焊接点位数据库中的数据,并通过各轴的伺服插补功能完成对相贯线焊缝的精插补,实现对T型管相贯线的精确拟合。同时控制两把焊枪在运动过程中执行位置跟随运动,实时调整焊枪相对YOZ平面的夹角以满足焊接工艺的需要。
参考文献:
[1]葛玉华,霍立兴,张玉凤.焊接专家系统的应用与发展[J].焊接技术,2008,29(2):41-42.
[2]方业.基于PMAC运动控制器的焊接机器人数控系统开发[J].电脑开发与应用,2008,21(5):82-83.
猜你喜欢
现代农机(2022年3期)2022-07-11
组合机床与自动化加工技术(2019年11期)2019-11-27
现代苏州(2019年16期)2019-09-27
语言与文化论坛(2019年3期)2019-04-13
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年9期)2017-11-27
湖北文理学院学报(2017年2期)2017-04-16
焊接(2016年6期)2016-02-27