一种新型双体无人监测船风力作用下的运动特性变化预报研究
2017-12-27 06:19何志强金久才王岩峰
海洋科学 2017年8期
官 晟, 何志强, 金久才, 王岩峰
一种新型双体无人监测船风力作用下的运动特性变化预报研究
官 晟1, 2, 何志强3, 金久才1, 王岩峰1, 2
(1. 国家海洋局第一海洋研究所, 山东 青岛 266061; 2. 青岛海洋科学与技术国家实验室 区域海洋动力学与数值模拟功能实验室, 山东 青岛 266237; 3. 中国船舶重工集团公司 第七一五研究所, 浙江 杭州 310023)
小型双体无人监测船运行平稳, 甲板尺寸大, 吃水浅, 在水环境监测、工程测量、巡逻跟踪、水产养殖等领域具有广阔的发展与应用前景。但该类船风阻大, 水动力复杂, 运动特性在风力作用下变化明显。本文对双体无人监测船的风作用力进行了分析, 将风作用项引入其动力学模型。利用该模型, 对其主要运动特性进行了仿真预报。仿真结果与现场实测数据具有良好的一致性。该研究结果可以为新型双体无人监测船运动控制算法在不同风作用环境下的适应性调整提供依据, 从而提高其海上作业能力与控制精度。
双体船; 风力作用; 运动特性; 仿真预报
近几年, 小型自动表面船(Unmanned Surface Vehicle, USV)在水环境监测、工程测量、巡逻跟踪、水产养殖等领域应用越来越广[1-4]。相比有人船, USV具有更高的作业效率, 可以连续长时间自主作业, 大大降低时间、人力、物力成本。USV还可以进入海况更复杂的区域, 尤其是有人船不易到达的岛礁区, 浅水区等。因此, USV和无人机、无人车技术一样, 具有广阔的发展与应用前景。双体无人船是USV船型结构中一种重要的类型。相比于传统船型, 双体无人船具有运行平稳, 甲板尺寸大, 吃水浅等优点, 是一种很有发展前途的USV类型。
准确的运动控制算法是无人船实现自动作业的重要基础技术之一。而无论是在人工遥控算法, 路线跟踪算法, 还是自主规划算法中, 运动特性都是基本参数[5-8]。运动特性既有USV自身结构、外形、动力等因素决定的部分, 也有USV对不同运动环境产生的响应部分。自然水体中, 风、流、波浪是对USV运动性能影响最大、最直接的环境因素[9]。由于小型USV在动力、速度等参数上远远小于一般船舶, 因此, 其运动性能受风、流、波浪等环境因素的影响也比一般船舶显著。双体USV船型新颖, 但风阻大, 水动力复杂, 风力作用研究尤为重要。
本文在一种搭载测深仪、温盐等传感器的双体USV运动模型研究的基础上, 分析了风场对其运动特性的作用, 并对主要运动性能进行了仿真预报。该工作可以为新型双体USV运动控制算法在不同风作用环境下的适应性调整提供依据。
1 双体无人监测船风作用下运动建模
1.1 双体无人监测船概述
该型USV整体结构如图1所示, 采用双体船结构, 安装双电力驱动器推动, 每个推进器转速等级范围0~200级, 对应推力0~37.5N。该船主要参数如表1所示。
1.2 双体无人监测船运动模型
水下载体运动时受到各种力和力矩的作用, 这些力和力矩形成的合力和合力矩使水下运动载体产生6个自由度的空间运动, 对应6个自由度的动力学描述公式, 称为六自由度方程。对USV而言, 六自由度方程中只考虑,,三式即可[10-11]。其中是方向拉力,是方向拉力,是水平转矩。双体USV的分离型船舶建模(Maneuvering Mathematical Modeling Group, MMG)相关方程如公式(1)~公式(3)所示。
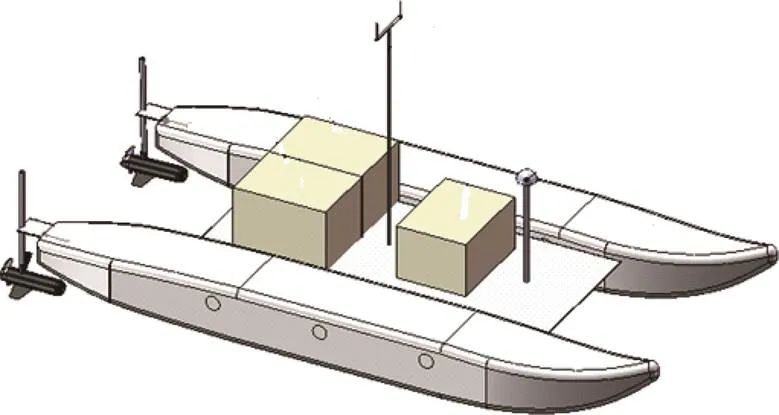
图1 双体无人监测船结构示意图
表1 目标USV主要参数

Tab.1 The main parameters of the USV



由于篇幅所限, 对上述经典方程就不做过多的解释, 详细情况可查阅相关资料[12-14]。







1.3 风力作用分析与运动模型中风作用项的引入
风对USV的作用就是USV出水部分所受的风阻力。风阻力公式为:

其中,为空气阻力系数, 和USV的特征面积(迎风面积), 物体光滑程度和整体形状有关,值通常是实验值, 一般在0.3~0.6之间;为空气密度, 正常的干燥空气可取1.293 kg/m3;为USV迎风面积;为运动物体与风的相对速度。






(14)
(15)


图3 USV受Y轴反方向风阻分析图
2 双体无人监测船运动仿真与实验
本文采用四阶龙格—库塔方法, 对由公式(14)~公式(16)及公式(7)~公式(9)组成的微分方程组求解。
2.1 逆风对USV最高速度的影响
假设风沿USV前进方向反向吹来, 仿真了不同风速下, 推进器不同转速等级下, USV的最高速度变化, 如图4所示。一般情况下, USV动作精度要求较高时, 都会降低速度。而从表2可以看出, 降低速度时, 风的影响比例提高, 在控制过程中需要格外注意。

图4 螺旋桨推力等级100时USV启动过程速度仿真图
2.2 侧向风对USV直行路径影响
仿真了2 m/s正侧向风作用下USV在不同推进力下的运动过程, 如图5所示。仿真了不同风速正侧向风作用下, USV在最大推力200级时的运动响应过程, 如图6所示。需要注意的是, 在10 m/s风速下, 由于USV侧向转矩较大, USV向来风方向转头, 并逆风前进了一段距离。仿真结果说明, 风场作用下USV转弯半径并不是随风速增大而一直减小。

表2 不同逆风速下USV最高速度变化

图5 左右推进器转速相同等级下USV受2 m/s正侧向风运动轨迹仿真

图6 左右推进器转速等级200时USV受正侧向风运动轨迹仿真
2.3 风对圆周运动USV路径影响
假设风沿轴反方向吹来, USV在风场内做圆周运动, 仿真了USV运动轨迹的变化。将该预报结果与双体USV在有风作用情况下, 做圆周运动的实际运动轨迹进行了对比。由于实验是在范围较小的水库静水中开展, 基本排除了水流、波浪对双体USV圆周运动的影响, 因此实际运动轨迹的变化主要是风作用引起。
左、右推进器转速等级分别为50、100时, 圆周运动轨迹直径仿真值为9.5 m, 实测平均值为12 m, , 误差为–20.8%; 在4 m/s风场中每圈位移3.1 m, 实测位移4 m, 误差为–22.5%, 上述情况如图7所示。左、右推进器转速等级分别为50、150时, 圆周运动轨迹直径仿真值为7 m, 实测平均值为8 m, 误差为–12.5%, 在4 m/s风场中每圈位移2.3 m, 实测位移2 m,误差为15%, 上述情况如图8所示。
3 结论与分析
本文在一种USV动力学模型基础上, 研究了风场作用项的引入, 并进行了不同风速, 不同推力下, USV速度、直行、转弯等主要运动特性的仿真预报。本研究结果能为USV实用性运动控制研究中相关部分奠定基础。
风作用项的引入预报了双体USV多种运动特性在风作用下的变化趋势。通过与前期研究结果和实测数据的对比, 证明了风场引入模型的可信性。圆周运动位移预报结果的误差与半径预报结果误差保持了较高的一致性, 两个实验中分别为1.08和1.2。这说明双体USV风作用运动模型中部分参数的选取, 以及不同推力作用下预报模型误差变化规律, 可在今后工作中进一步研究。
仿真结果和现场实验也揭示了, 该型USV尽管能够完成部分无人监测作业, 连续工作时长等指标能够达到设计要求, 但动力较小, 速度较慢, 抗风能力较差, 大大降低了环境适用性。下一步考虑采用增强推力, 加装稳定呆木、方向舵等措施, 提高USV对恶劣海洋环境的适应能力。

图7 左、右推进器转速等级分别为50、100的情况下USV在4 m/s风场中运动轨迹仿真与实测图

图8 左、右推进器转速等级分别为50、150的情况下USV在4 m/s风场中运动轨迹仿真与实测图
[1] Claudia Doria Rodriguez-Ortiz. Automated bathymetry mapping using an autonomous surface craft[D]. Massachusetts: Massachusetts Institute of Technology, 1996.
[2] Curcio J, Leonard J, Patrikalakis A. SCOUT - a low cost autonomous surface platform for research in cooperative autonomy[C]//MTS/IEEE. OCEANS 2005. USA: Institute of Electrical and Electronics Engineers Inc, 2005: 725-729.
[3] 金久才, 张杰, 王岩峰, 等. 自动表面船用于岛礁水深测绘[J]. 海洋技术, 2010, 29(2): 5-8. Jin Jiucai, Zhang Jie, Wang Yanfeng, et al. Bathymetry Mapping around Islands Using an Autonomous Surface Vehicle[J]. Ocean Technology, 2010, 29(2): 5-8.
[4] 金久才, 张杰, 马毅, 等. 一种无人船水深测量系统及试验[J]. 海洋测绘, 2013, 33(2): 53-56. Jin Jiucai, Zhang Jie, Ma Yi, et al. An unmanned surface vehicle for bathymetry[J]. Hydrographic Surveying and Charting, 2013, 33(2): 53-56.
[5] 赵月林, 古文贤. 浅水低速状态下操纵运动数学模型研究[J]. 大连海事学院学报, 1993, 18(3): 242-246. Zhao Yuelin, Gu Wenxian. Research on mathematic ship motion model under shoal water and low speed[J]. Journal of Dalian Maritime University, 1993, 18(3): 242-246.
[6] 杨盐生. 船舶运动控制研究[J]. 交通运输工程学报, 2003, 3(2): 34-39. Yang Yansheng. Review on ship motion control[J]. Journal of Traffic and Transportation Engineering, 2003, 3(2): 34-39.
[7] Evans J, Nahon M. Dynamics modeling and performance valuation of an autonomous underwater vehicle[J]. Ocean Engineering, 2004, 31: 1835-1858.
[8] Wu Jiaming, Ye Jiawei, Yang Cheng, et al. Experimental study on a controllable underwater towed system[J]. Ocean Engineering, 2005, 32: 1803-1817.
[9] 郎济才, 胡翩, 范蠡, 等. 双体船干扰阻力计算研究[J]. 船海工程, 2014, 43(2): 62-65. Lang Jicai, Hu Pian, Fan Li, et al. Research on the interference resistance of catamaran[J]. Ship & Ocean Engineering, 2014, 43(2): 62-65.
[10] Wang Zhidong, Li Wei. The prediction of kinetic characteristics of dynamically stationed ship acted by wind and current[J]. Journal of East China Shipbuilding Institute, 1995, 9(2): 1-6.
[11] 马建文, 张安西, 周兆欣, 等.小水线面双体船五自由度运动建模与仿真[J]. 中国舰船研究, 2017, 12(2): 133-136.Ma Jianwen, Zhang Anxi, Zhou Zhaoxin, et al. Modeling and simulation of five dof motions for swath ships[J]. Chinese Journal of Ship Research, 2017, 12(2): 133-136.
[12] 蒋新松, 封锡圣, 王棣棠. 水下机器人[M]. 沈阳: 辽宁科学技术出版社, 2000: 244. Jiang Xinsong, Feng Xisheng, Wang Ditang. Unmanned underwater vehicles[M]. Shenyang: Liaoning Science and Technology Publishing House, 2000: 244.
[13] Hirano M. On calculation method of ship maneuvering motion at initial design phase[J]. Journal of the Society of Naval Architects of Japan, 1980, 147: 144-153.
[14] Inoue S, Hirano M, Kijima K. A practical calculation method of ship maneuvering motion[J].International Shipbuilding Progress, 1981, 28(325): 207-222.
[15] Guan Sheng, Wang Yanfeng, Jin Jiucai, et al. A marine monitoring two-body unmanned surface vehicle motion modeling and validation studies[C]//The 11th World Congress on Intelligent Control and Automation. Proceedings of the World Congress on Intelligent Control and Automation (WCICA).New York: Institute of Electrical and Electronics Engineers Inc, 2015: 3118-3121.
(本文编辑: 李晓燕)
Prediction of change in motion characteristics of marine- monitoring two-body unmanned surface vehicle by wind force
GUAN Sheng1, 2, HE Zhi-qiang3, JIN Jiu-cai1, WANG Yan-feng1, 2
(1.The First Institute of Oceanography, State Oceanic Administration, Qingdao 266061, China, 2. Laboratory for Regional Oceanography and Numerical Modeling, Qingdao National Laboratory for Marine Science and Technology, Qingdao 266237, China, 3. 715thResearch Institute of China Shipbuilding Industry Corporation, Hangzhou 310023, China)
Small two-body marine-monitoring unmanned surface vehicles (USVs) sail smoothly with a larger deck and shallower draft than other common ships. USVs can be widely used in water environmental monitoring, engineering surveying, andpatrolling. However, the motion characteristics of this two-body ship are significant in complicated hydrodynamic environments and strong wind forces. In this paper, we studied the wind influence on the USV by wind forces introduced into a dynamic model and used our model to predict the USV’s motion characteristics induced by these wind forces. We found the simulation results to befairly consistent with observed data. As such, to further improve the USV’s working capability and control accuracy, we proved the usefulness of this model for the development of a control algorithm for determining theUSV’s adaptabilityunder different wind environments.
two-body unmanned surface vehicle; wind effects; motion characteristics; simulation and prediction
[National key research and development plan “Development and application of long ramge underwater gliders”. No. 2016YFC031100; National key research and development program “Verification and application of the sea trial for long distance underwater glider”, No. 2016YFC0301103; National High Technology Research and Development Program(863 Program) “Wave Glider Remote Ocean Environmental Observation System”, No. 2014AA09A508]
Mar. 31, 2017
P715.4+1
A
1000-3096(2017)08-0070-06
10.11759/hykx20170331
2017-03-31;
2017-05-31
国家重点研发计划项目“长航程水下滑翔机研制与海试应用”(2016YFC031100); 国家重点研发计划“长航程水下滑翔机海试验证与应用”(2016YFC0301103); 国家高技术研究发展计划(863计划)“波浪滑翔器无人自主海洋环境观测系统”(2014AA09A508)
官晟(1972-), 男, 山东青岛人, 研究员, 博士, 研究方向为海洋物理应用技术, 电话: 0532-88896378, E-mail: gsh30@163.com; 王岩峰,通信作者, 研究员, 电话: 0532-88968181, E-mail: wangyf@fio.org.cn
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
海洋通报(2021年5期)2021-12-21
舰船科学技术(2021年12期)2021-03-29
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
当代陕西(2018年12期)2018-08-04
能源(2017年8期)2017-10-18
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
通信电源技术(2016年1期)2016-04-16