
V2X系统应用中多场景融合及预警优先级浅析
2017-12-28 09:25曹增良陈效华CaoZengliangChenXinChenXiaohua
北京汽车 2017年6期
曹增良,陈 新,陈效华 Cao Zengliang,Chen Xin,Chen Xiaohua
V2X系统应用中多场景融合及预警优先级浅析
曹增良,陈 新,陈效华 Cao Zengliang,Chen Xin,Chen Xiaohua
(北汽集团新技术研究院,北京 101300)
在V2X(Vehicle to X,车对外界的信息交换)系统应用中,存在多种不同的具体功能场景,如前向碰撞预警、紧急刹车预警、车辆变道预警等。在具体车辆行驶过程,多场景同时触发的情况肯定存在。主要讨论在此种情况下,在保证车辆和公共安全的前提下,考虑如何确定多场景触发情况下的优先级分类,同时优化多场景同时触发下的优先级报警问题。
V2X;多场景融合;优先级分类;车辆分类;目标分类
0 引 言
V2X(Vehicle to X,车对外界的信息交换)是未来智能交通运输系统的关键技术,使得车与车、车与基站、基站与基站之间能够通信,从而获得实时路况、道路信息、行人信息等一系列交通信息,提高驾驶安全性、减少拥堵、提高交通效率、提供车载娱乐信息等。
吴建军:一系列针对性举措密集出台,最主要的信号是国家将大力支持民营企业发展,消除各种显性和隐性壁垒,切实解决民营企业在发展中遇到的难题,为其提供良好的法制环境和营商环境,依法保护民营企业的权益,鼓励、支持、引导民营企业继续发展壮大,充分发挥民营企业的活力和创造力,提升企业和市场的信心。目前,中国经济面临众多的困难和挑战,例如消费需求不足、投资增速下滑、出口受阻、金融不能为实体经济提供有效支持等等。成本与资金压力较大、债务问题不断增加、对未来发展的信心不足阻碍了民营经济进一步发展。以上困难与挑战,既有周期性因素,也有结构性因素,还与体制改革不到位及企业自身能力不足有关。
讨论V2X范围中的V2V(Vehicle to Vehicle)所包含的各种应用场景[1]。在应用中,车辆间通过周期性的广播BSM(Basic Safety Message)消息,将本车的位置(经、纬度信息)、高度、速度、加速度等信息发送至周边车辆,同时接收周边车辆发来的同样信息,经过计算处理上述2组数据,可以判断分析出周边车辆相对本车的距离和位置。根据周边车辆的相对位置,结合实际车辆行驶的工况,以保证车辆和公共安全为出发点,衍生出各种不同的功能场景,如紧急刹车预警、十字路口不明状态预警、车辆变道预警等。
实际的车辆行驶工况有较高的实时性且环境十分复杂。上述功能场景的划分是从理论上将实际行驶工况进行分割划分,但在V2X具体实际应用中必须将各种功能场景再进行融合,并且对不同的功能场景的危害等级和预警的先后顺序进行排序,即在同一时刻触发2种以上不同功能场景时,预警信息不能同时显示,只能单一分先后进行预警。
1 车辆位置分类
根据实际周边车辆相对于本车的位置,按照远近和方位大致可分为13种相对位置,如图1所示,即正前、正远前、前左、前右、前远右、前远左;正右、正左;正后、后左、后右、后远左,后远右。V2X系统的具体功能场景应用即是在分辨出两车的上述相对位置后再经过计算距离和时间,最终产生预警。
2 功能场景的定义和分类
同时,V2X系统的功能场景还衍生出非紧急情况下的各种应用,如异常车辆提醒、道路危险状况提醒、限速预警、闯红灯预警、弱势交通参与者碰撞预警、绿波车速引导、前方拥堵提醒、紧急车辆提醒等,此类应用预警为提高公共交通安全和公共交通效率有很多帮助。
国外对发生交通事故的原因进行统计分析,从事故发生的频率、损失成本等因素综合考量,发生事故的工况环境可分为前车停止、前车控制力缺失、车辆在无信号灯时拐弯、前车减速、车辆变道等。分析以上几种工况可以总结出具体的应用场景和预警,例如EEBL(Electronic Emergency Brake Light,紧急电子刹车灯)、FCW(Forward Collision Warning,前向碰撞预警)、BSW(Blind Spot Warning,盲区预警)、LCW(Lane Change Warning,车辆变道预警)、DNPW(Do Not Pass Warning,逆向超车预警)、IMA(Intersection Motion Assistant,十字路口移动辅助)、CLW(Control Lost Warning,车辆失控预警)等。
3 功能场景在车辆位置中的分类
我国《国家安全法》第52条规定:“国家安全机关、公安机关、有关军事机关根据职责分工,依法搜集涉及国家安全的情报信息。”特别在第四章第二节“情报信息”第51条~第54条中,分别规定了“情报工作制度”“各部门搜集上报情报信息职责”“情报信息工作运用现代科技手段和加强研判分析”“情报信息的报送要求”等内容。“该法的立法模式呈现‘原始型’(即分散式立法)向‘混合型Ⅰ’(即分散式+专门式立法)再向‘混合型Ⅱ’(即分散式+专门式+综合式立法)发展的趋势”。《国家安全法》是我国国家安全领域的基础性法律,也是统筹、引领国家安全领域立法工作的综合性法律之一,该法涵盖了国家安全多个领域。
其他交通辅助类和交通效率类的场景,如道路危险状况提示,限速预警,闯红灯预警等与本车发生位置不确定,未在分析中。
式中:Ton为EVA中比较寄存器 CMPR1、CMPR2、CMPR3的值;T1为2倍通用定时器周期寄存器T1PR的值;ωt为采样时刻,ωt=2 kπ/N(k=0,1,2,…,N-1),代入式(5)得到:
4 多场景融合条件下的预警顺序
在安全类预警中再细分多场景融合条件下的优先级先后顺序,需要考虑各场景发生所涉车辆间的最小碰撞时间和相对位置关系等因素。最小碰撞时间是首要考虑因素,在这一前提下再考虑所涉车辆的相对位置关系。结合图2中各功能场景在相对车辆位置的分类,总结安全类预警优先级如图4所示。
结合图1中的车辆相对位置划分,将V2X系统具体功能场景进行分类填充,如图2所示,FCW和EEBL场景产生于本车正前方,且EEBL有可能是远前方位置,因为中间可能会间隔其他车辆;而BSW和LCW两个场景产生于本车侧后方的两侧,且两个场景可能是融合运用,即如果没有转向信号,场景为盲点检测预警,如果有转向信号,场景为盲点检测预警和车辆变道预警同时触发;DNPW和IMA 两个场景可能产生于本车侧前方的两侧。

图2 功能场景相对位置分布
注:V2P(Vehicle to Pedestrians,车载单元与行人设备通信)。
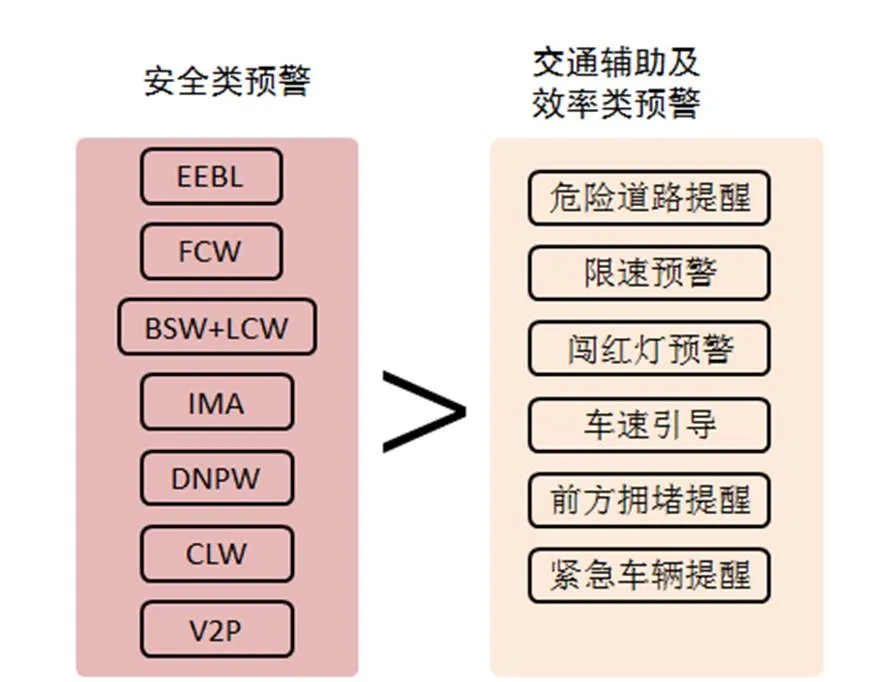
综合考虑所有功能场景的工况,结合实际发生危害的严重程度,将所有功能场景预警分为2类,即安全类预警和交通辅助及效率类预警。基于车辆安全和公共交通的基础前提,可以肯定安全类预警的优先级大于交通辅助及效率类预警,如图3所示。
1)基于授课过程进行评价。在教学过程中,学生可在每次课后对课堂教学进行评价,授课教师在课后可以看到学生的评价结果,以判断学生对自己本次授课的满意程度,从而主动发现问题并加以总结改进。在一个学期内,经过一段时间的授课或者课程全部结束之后,教师已获得学生多次评价,从评价结果曲线可以判断学生对自己一段时间内授课内容的接受程度,也可以看出学生对授课内容中不太满意的章节,便于后续的复习总结中有所侧重。同时,学生在每次课后评价中也可以以文字形式更加具体直接地向教师反馈意见,便于教师在后续课程中改进。

图4 安全类预警优先级判定
图4中的每个模块,在每个场景同时触发的前提下,即最小碰撞时间相同,以保证人身安全为首要要求。EEBL和BSW相比,前车EEBL更为紧要,所以预警优先级排序为:V2P>FCW>EEBL>BSW+LCW>DNPW>IMA。
在交通辅助及效率类功能场景预警中,同样以保证车辆安全和公共安全为前提条件,以此可以判定预警优先级的顺序,如图5所示。
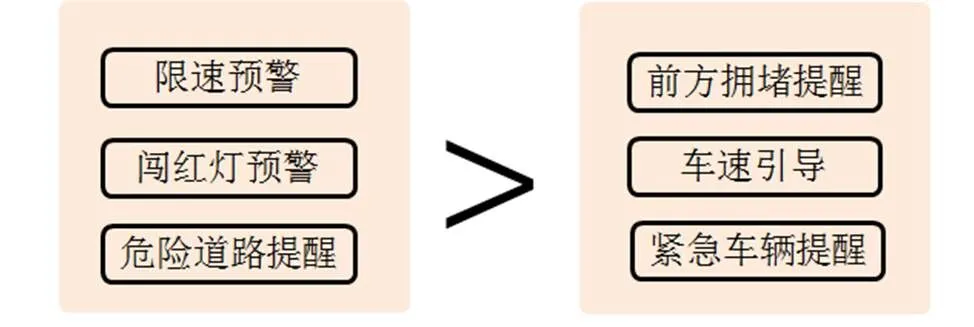
图5 交通辅助及效率类优先级判定
在限速预警、闯红灯预警和危险道路提醒3个场景中,闯红灯预警的优先级最高,危险道路提醒和限速预警分别次之。在前方拥堵提醒、车速引导和紧急车辆提醒3个预警中,前方拥堵提醒优先级最为靠后,车速引导相对靠前。因此整体优先级顺序为:闯红灯预警>危险道路提醒>限速预警>车速引导>紧急车辆提醒>前方拥堵提醒。
5 总 结
讨论V2X系统应用中多场景融合条件下各种不同预警的优先级排序问题。在保证最基本的车辆和公共安全的前提下,首先考虑预警触发时具体功能场景中所涉车辆间最小碰撞时间;其次考虑相关车辆的相对位置;然后综合各种工况因素,在非紧急情况下,可能同时产生2种以上的预警。
[1]合作式智能运输系统车用通信系统应用层及应用数据交互标准:中国汽车工程协会T/CSAE 53-2017[S].
2017-08-22
1002-4581(2017)06-0030-03
U46:TP18
A
10.14175/j.issn.1002-4581.2017.06.009
猜你喜欢
煤气与热力(2022年4期)2022-05-23
环球时报(2022-03-09)2022-03-09
包装工程(2022年1期)2022-01-26
防爆电机(2021年5期)2021-11-04
意林原创版(2021年7期)2021-08-03
舰船科学技术(2021年12期)2021-03-29
北京汽车(2020年1期)2020-05-07
小太阳画报(2018年3期)2018-05-14
阅读与作文(小学低年级版)(2016年12期)2016-12-22
小说月刊(2014年11期)2014-04-18
