
基于混合高斯模型的运动目标平均背景法检测
2017-12-28 08:50刘丽伟张宏美薛春芳
长春工业大学学报 2017年5期
刘丽伟, 张宏美, 薛春芳, 满 涛
(长春工业大学 计算机科学与工程学院, 吉林 长春 130012)
基于混合高斯模型的运动目标平均背景法检测
刘丽伟, 张宏美, 薛春芳, 满 涛
(长春工业大学 计算机科学与工程学院, 吉林 长春 130012)
首先采用平均背景法对混合高斯建模获得的背景进行处理得到纯净的背景,然后在当前图像与背景图像之间进行差分运算,最后通过轮廓筛选的方法去除目标图像中的干扰点,并通过形态学处理对目标中的间隙进行填充,获得完整目标。 实验结果表明,对于运动目标及停留的目标,该算法的识别率和误检率分别为86.7%和8.3%。
目标检测; 混合高斯模型; 平均背景; 轮廓筛选
0 引 言
运动目标检测是将视频中的运动目标从背景中分离出来,在这一过程中需要克服天气、光照变化等对检测带来的影响,且检测结果对后续的处理影响较大[1-2]。目前,光流法、帧差法和背景差分法是运动目标检测算法中最主要也是最常用的3种算法[3-5]。其中,光流法是根据目标运动速度来实现对目标检测,它可以在完全不知道运动场景的情况下完成运动目标的检测,但是该算法计算复杂,并且需要专门的硬件才能运行此算法,不能用于实时目标检测[6-7]。帧差法是最为简单且运行速度最快的一种目标检测算法[8],但无论是传统帧差法还是其改进算法,都未能得到完整的目标,且当目标停留或运动较慢时,还容易造成漏检。背景差分法是通过当前图像与背景图像之间的差分运算来完成目标检测的[9],其中Zoran Zivkovic[10]提出的基于像素的混合高斯背景模型能够对背景实时更新,同时能够适当地选择高斯模型的个数,所以该算法能够对运动目标进行较好的检测,但对于视频中做短暂停留的运动目标,则会出现较大空洞甚至只可以得到目标轮廓,郭伟[11]等对混合高斯模型进行了改进,根据运动目标的不同情况设置了不同的学习率,对运动缓慢的运动目标的检测效果进行了改善,但没有提出对场景中短暂停留的运动目标的检测算法。
为了解决高斯混合模型对视频中停留的目标在检测过程中容易融为背景的问题,文中提出了基于混合高斯模型的改进型背景差分算法。该算法将背景图像的获得方式进行了改进,并将背景差分后获得的结果与混合高斯模型检测出的前景图像进行“或”运算,解决差分运算过程中因目标与背景图颜色相近产生的目标部分缺失问题。该算法不但可以检测出视频中的运动目标,而且对于在场景中做短暂停留的目标检测效果也较好,避免了“空洞”现象的出现。
1 混合高斯背景建模
Zoran Zivkovic[10]提出的基于像素的自适应混合高斯背景模型的基本思想是在RGB空间或者其他的颜色空间中将时间点t处的单一像素定义为x{t},其背景模型定义为px(t)|χT,BG+FG,用M(默认值为5)个高斯分布的加权和来表征背景:

对于一组新的数据,高斯混合模型的权值、均值和方差将按下式进行更新:

一般情况下,前景目标权值较小,而背景模型权值较大,因此,可以通过设定合适的阈值来得到近似的背景模型:
按照混合高斯模型权值大小将所建立的高斯分布降序排列,可以得到
式中:cf----属于前景并对背景模型没有影响的数据占总数据的百分比。
2 改进的目标检测算法
2.1 基于混合高斯模型的平均背景法
Zoran Zivkovic[10]提出的混合高斯模型虽然对运动目标的检测效果较好,但对于在视频中做短暂停留的目标,会因背景更新而出现检测不完整的问题,如果降低背景的更新率,那么当运动场景发生变化时,将无法对背景进行实时更新,影响对视频中其他运动目标的检测。针对此问题,文中对混合高斯模型目标检测算法进行了如下改进。
2.1.1 改进的背景提取
用传统的平均背景法思想处理混合高斯模型建立的背景,获得更为真实的背景。当目标在视频中停留时,目标在背景中所占的比重会逐渐增加,所以,停留时间越长,目标检测越不完整。如果将目标融入背景中的部分去除掉,就可以得到更加真实的背景,检测到的目标也会更加完整。传统的平均背景法是对输入的视频序列直接进行处理,所以得到的背景并不纯净,而将其用于对混合高斯模型建立的背景处理,却能取得较好的结果,主要原因是混合高斯模型建立的背景在通常情况下较为纯净,只有当目标停留在背景中时,才会由于背景的更新将目标融为背景,其次是因为目标是逐渐融为背景的,通过对连续几帧图像的背景进行均值运算,虽不能完全去除融入背景的目标,但可以降低目标在背景中所占的比重,使得到的背景更加接近于真实的背景。该算法的运算步骤如下:
1)设I1(x,y),I2(x,y),…,In(x,y)为输入的视频序列连续n帧图像,对输入的每一帧图像进行混合高斯背景建模,获得每一帧图像的背景图片B1(x,y),B2(x,y),…,Bn(x,y)。
2)对连续6帧背景图片进行求和运算。设Bk(x,y)为第k帧图像对应的背景图,则
3)对所得到的图像S(k,k-5)(x,y)求平均
2.1.2 改进的前景检测
对于检测结果中存在的干扰点主要有形态学处理和连通域分析两种方法。
形态学处理是一种很好的去除干扰点的方法,但如果干扰点较大,那么在处理过程中对于目标会产生较大影响,而连通域分析对于孤立的细小的干扰点的处理效果较好,对于较大的干扰点则不能进行很好的去除。为了更好地消除干扰点,文中提出轮廓提取和形态学滤波进行结合的方法。该算法的基本思想是先寻找检测结果中干扰点和所有目标的轮廓,然后根据轮廓的面积对轮廓进行筛选,去除轮廓面积较小的干扰点。去除干扰点后,对目标进行形态学操作,对目标中存在的空洞进行填充,具体步骤如下:
1)寻找目标轮廓。在轮廓的检索模式中,选择RETR_CCOMP检索模式,提取所有轮廓,并将其组织成双层结构,顶层为外围边界,次层为孔的内层边界。在轮廓的近似方法中,选择使用Teh-Chinl链逼近算法对轮廓进行近似处理。
2)轮廓面积筛选。求出每一个轮廓的面积contourArea[i],然后通过设置合适的阈值去除掉前景中存在的干扰。通常情况下,干扰点的轮廓面积比目标的轮廓面积小,所以相对于连通域分析方法,这种方法更加简单有效。
3)进行轮廓绘制。需要将线条颜色选择为白色,并将线条绘制在轮廓内部。通过这一步的操作,可以得到只包含目标的图像。
4)对目标进行膨胀处理。虽然轮廓的绘制可以对目标图像内部的空洞进行填充,但如果目标被细小的间隙分隔开,那么在进行轮廓查找时,这些被分开的部分会被认为是不同的目标,对其进行轮廓绘制时也是单独处理的,所以对于这些细小的间隙,膨胀处理是最有效的方法。
5)对目标图像进行腐蚀操作。通过膨胀操作对目标中的间隙进行填充后,目标会出现一定的失真,此时可以对目标进行腐蚀操作,腐蚀操作的核选择和膨胀操作相同大小的核,这样可以对4)中膨胀的部分进行中和,减少目标的失真。
2.2 运动目标检测算法流程
首先对输入的每一帧视频序列进行混合高斯背景建模,然后对获得的背景进行处理,获得图像的平均背景,再将当前图像与背景图像进行差分运算,对差分后的结果进行轮廓筛选及绘制,去除干扰点,最后通过形态学操作,填充目标间隙,得到完整目标。
运动目标检测流程如图1所示。

图1 运动目标检测流程
3 实验结果与分析
3.1 实验结果
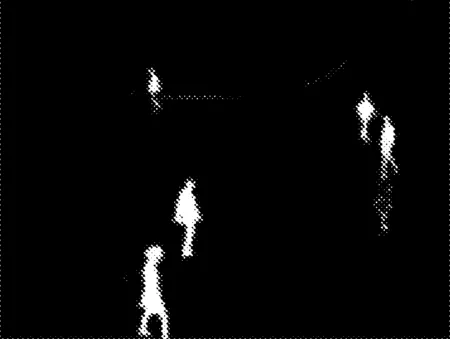
文中的实验环境为Opencv3.0+VS2013,检测的目标为室外行走的人,且目标为多个。文中截取了视频的第587,601,608和620帧用不同方法处理的结果来说明文中算法的有效性。不同算法检测结果如图2所示。

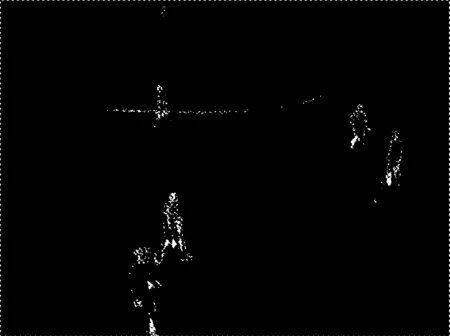
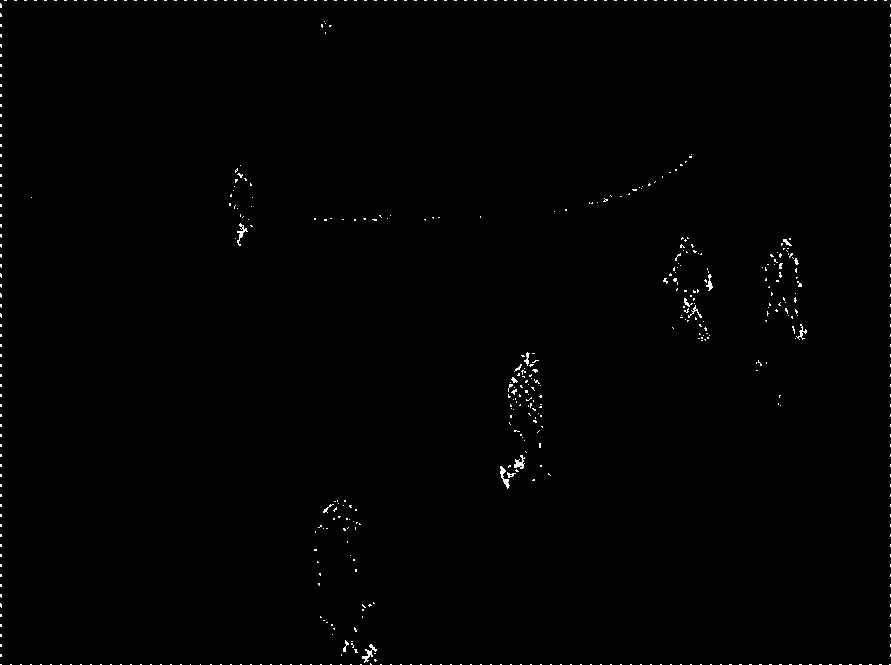
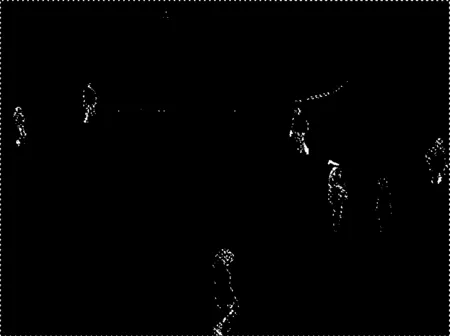

(c) 帧差法检测结果


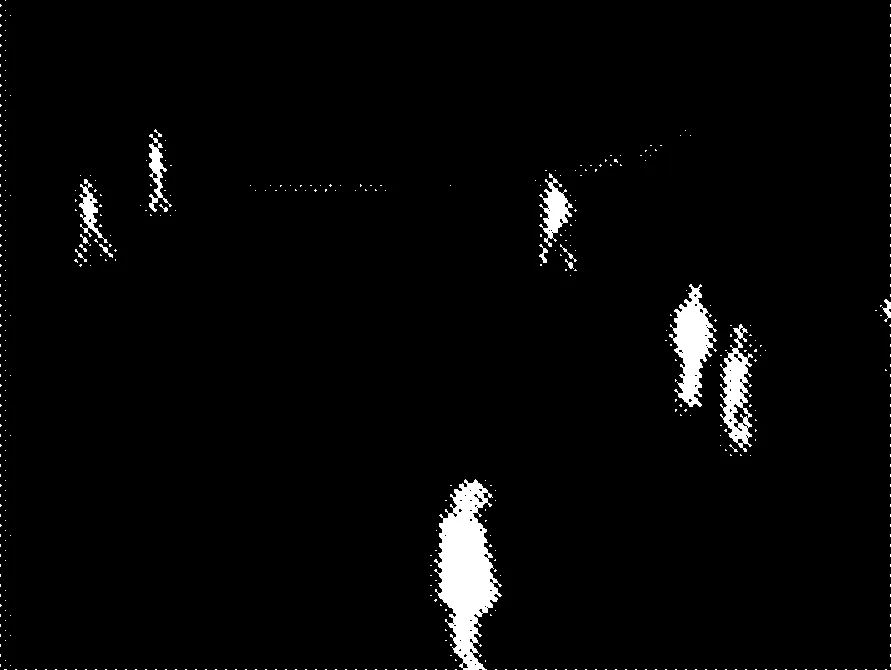
(d) 混合高斯模型检测结果
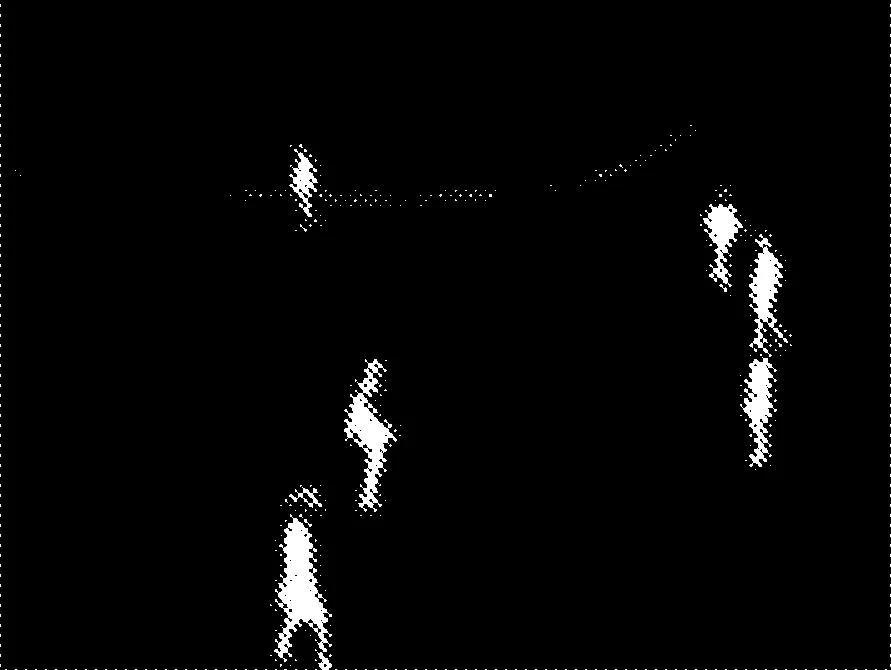

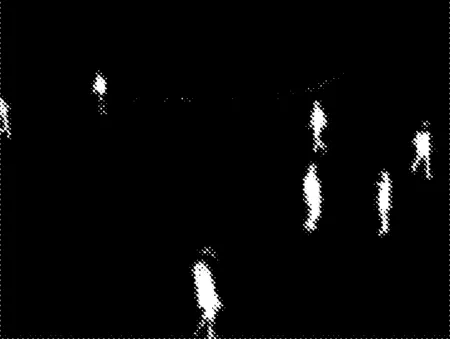
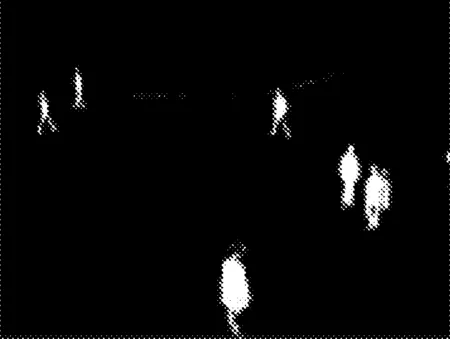
(e) OTSU算法检测结果
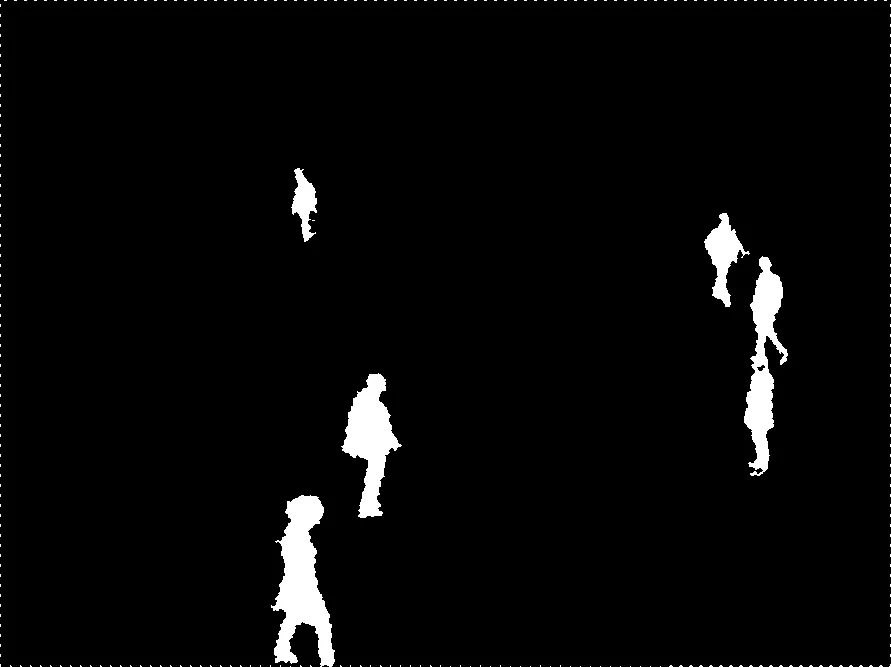
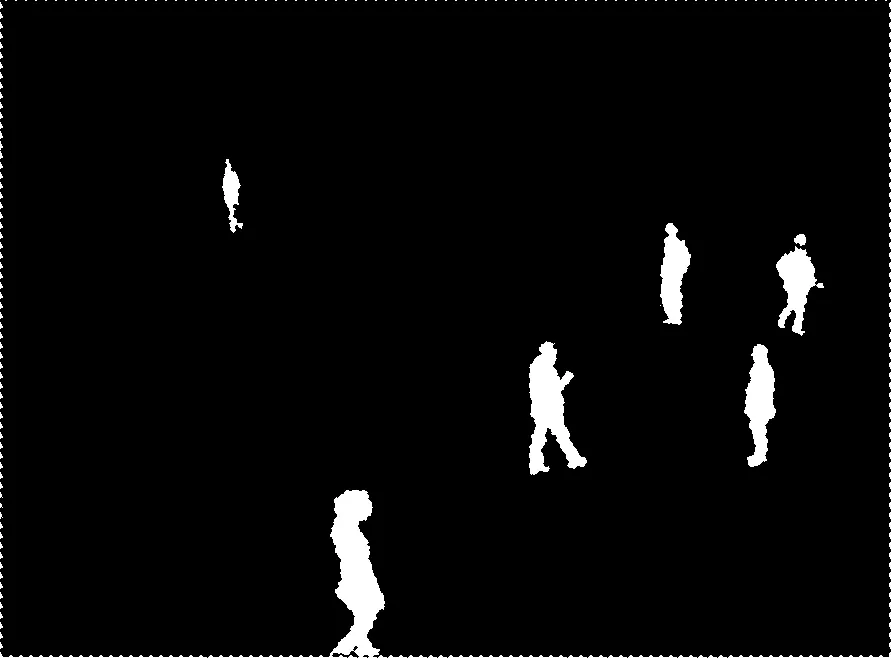
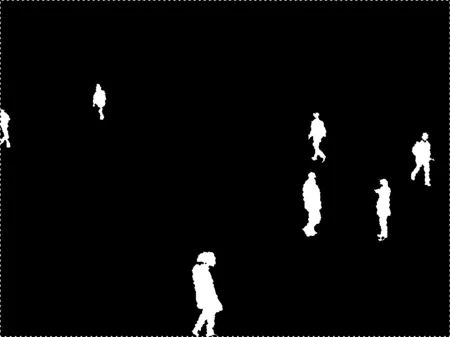
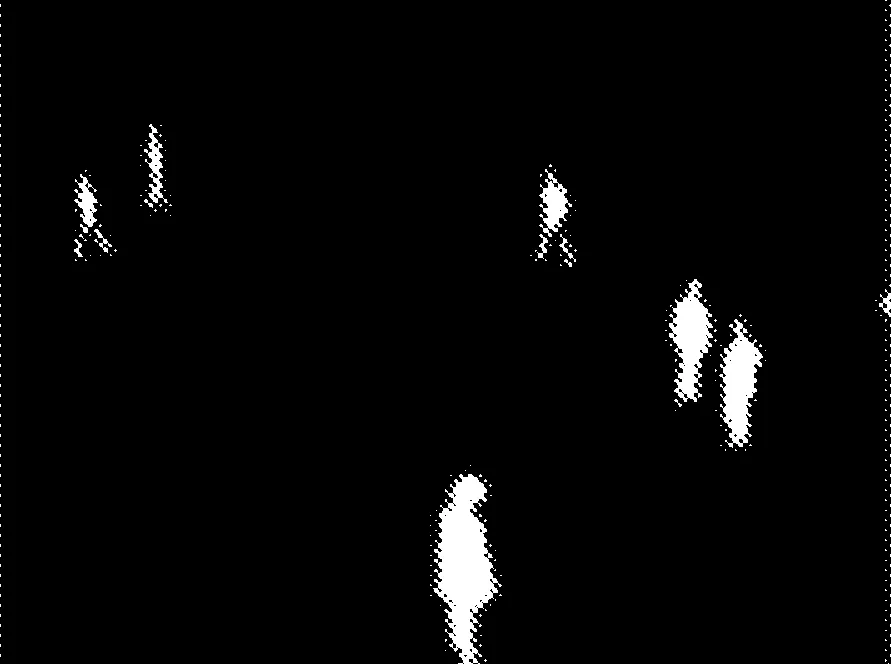
(f) 文中算法检测结果
从实验结果中可以看出,三帧差分法可以检测到运动目标的轮廓,但是对于在视频中停留的目标,由于位置没有发生改变,造成了目标的漏检。混合高斯算法能够很好地检测出完整的运动目标,但是当目标停留时,会慢慢融入背景,此时只能检测到该目标的轮廓。OTSU算法和文中算法对停留的目标检测效果都很好,但是当停留的目标开始运动时,OTSU算法检测出的目标存在“拖影”现象。文中通过对混合高斯模型获得的背景进行均值运算,对融入背景中的目标进行中和,得到了更加纯净的背景图像,从背景图像中可以看出,随着运动目标在场景中停留的时间变长,提取的背景中目标停留的位置出现了目标模糊的影子,但从检测结果来看,检测的效果并未因此受到影响,而且当目标开始运动时,也并未出现“拖影”现象,所以,文中算法能够实现对视频中运动目标的检测,同时对于在视频中停留的目标,也可以完整地检测出来,并且在目标开始运动后,避免了“拖影”现象的出现,检测效果较好。
3.2 结果分析
为了更好地说明文中算法的优点,采用文献[11]中的识别率和误检率对文中算法和其他3种算法进行比较。识别率DR和误检率FAR算法如下:

两种方法的识别率DR和误检率FAR见表1。
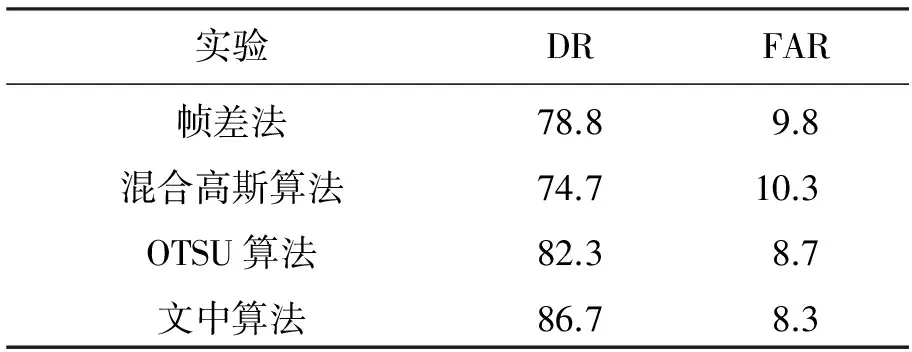
表1 两种方法的识别率DR和误检率FAR %
实验结果表明,文中算法将传统的平均背景法用于对混合高斯检测的背景处理,提高了获得的背景质量,使其能够检测出在视频中运动的目标,同时对停留的目标检测效果较好,提高了算法的识别率,对于在视频中停留后开始运动的目标,能够避免“拖影”现象,降低了目标的误检率。综上所述,文中算法检测效果较好。
4 结 语
针对目标在视频中做短暂停留时因背景更新出现的检测不完整情况,提出基于混合高斯模型的平均背景法,该算法通过传统的平均背景法对混合高斯背景建模获得的背景进行处理,淡化了因停留而融入背景的目标,使获得的背景更加纯净,然后通过当前图像和背景图像之间的差分运算得到目标图像,最后通过轮廓筛选和形态学处理去除干扰点,并完成对目标间隙的填充,最终得到完整目标。通过实验结果可以看出,该算法除了能够检测出视频中运动的目标,还能够完整地检测出在视频中停留的目标,当停留的目标开始运动时,可以避免“拖影”现象出现,其识别率和误检率分别为86.7%和8.3%,检测效果较好。但是由于对多帧混合高斯建模的背景进行了运算,造成算法的运行时间较长,这是文中算法的不足之处,有待改进。
[1] 王思思,任世卿.一种改进的基于混合高斯模型的运动目标检测算法[J].计算机科学,2015,42(s2):173-174.
[2] 张红颖,胡正.CenSurE特征和时空信息相结合的运动目标检测[J].光学精密工程,2013(9):2452-2463.
[3] 宋志勤,路锦正,聂诗良.改进的时空背景差分目标检测[J].光电工程,2016(2):27-32.
[4] 陆牧,高扬,朱明.动基座下的运动目标检测[J].光学精密工程,2016(5):1782-1788.
[5] 王彬,马永杰,李鹏飞.结合分块的改进三帧差和背景差的运动目标检测[J].计算机系统应用,2015,24(8):155-159.
[6] 邱联奎,刘启亮,赵予龙,等.混合高斯背景模型目标检测的一种改进算法[J].计算机仿真,2014(5):378-384.
[7] 刘洪彬,常发亮.权重系数自适应光流法运动目标检测[J].光学精密工程,2016(2):460-467.
[8] 王维合,王宏志,赵兰英.运动目标检测跟踪方法研究[J].长春工业大学学报:自然科学版,2001,22(4):411-414.
[9] 张传伟,王京梅,林晓明,等.基于背景差分的一种运动目标检测方法[J].电子科技,2015,28(10):69-71.
[10] Zivkovic Z. Improved adaptive gaussian mixture model for background subtraction[J]. International Conference on Pattern Recognition. IEEE,2004(2):28-31.
[11] 郭伟,高媛媛,刘鑫焱.改进的基于混合高斯模型的运动目标检测算法[J].计算机工程与应用,2016,52(13):195-200.
[12] 王宏志,刘媛媛,孙琦.基于小波变换矩阵的改进脊波变换图像去噪[J].吉林大学学报:理学版, 2010,48(1):99-103.
AnaveragebackgroundmethodbasedonmixedGaussianmodelformovingobjectdetection
LIU Liwei, ZHANG Hongmei, XUE Chunfang, MAN Tao
(School of Computer Science and Engineering, Changchun University of Technology, Changchun 130012, China)
The average background method is used to deal the background obtained from mixed Gaussian to purify the image background. Then the difference between current and background image is calculated, and the interference points in the image are removed with contour screening. The gap in the image is filled with morphological processing to obtain the final image. Experimental results indicate that the recognition rate and false rate are 86.7% and 8.3% respectively, for both the moving and staying target.
target detection; mixed Gaussian model; average background; contour screening.
2017-07-11
吉林省教育厅“十三五”科学技术研究基金资助项目(2016-35)
刘丽伟(1974-),女,汉族,吉林通化人,长春工业大学副教授,博士,主要从事模式识别和智能系统方向研究,E-mail:liuliwei@ccut.edu.cn.
10.15923/j.cnki.cn22-1382/t.2017.5.02
TP 391
A
1674-1374(2017)05-0421-05
猜你喜欢
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
装备制造技术(2020年1期)2020-12-25
制造技术与机床(2019年11期)2019-12-04
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
中国交通信息化(2017年4期)2017-06-06
贵州师范学院学报(2016年4期)2016-12-01
电影故事(2015年16期)2015-07-14
舒适广告(2008年9期)2008-09-22
