
电梯紧急制停时速度异常的分析与探讨
2018-01-03 06:19马锦华方永清
设备管理与维修 2017年10期
马锦华,方永清
(杭州西奥电梯有限公司,浙江杭州 311199)
电梯紧急制停时速度异常的分析与探讨
马锦华1,方永清2
(杭州西奥电梯有限公司,浙江杭州 311199)
对电梯系统紧急制停时,系统速度出现突然加速的异常现象进行数理分析和试验验证,提出系统绕主机曳引轴进行定轴转动的角加速度和最大轿厢速度的理论计算方法,以利于制动器延迟以及轿厢意外移动保护装置系统设计。
制动器延迟;制停速度;限速器;轿厢意外移动
10.16621/j.cnki.issn1001-0599.2017.10.18
0 引言
电梯制动器是确保电梯正常运行,且动作最频繁的重要安全部件之一。它能保证电梯的电动机在没有电源供应的情况下停止转动,并使轿厢有效制停[1]。
《GB 7588—2003电梯制造与安装安全规范》中条款9.9.1~9.9.3,9.10.1,10.4.2及9.3和标准的附录M,分别对电梯的限速器动作速度、制动能力以及紧急制动的减速度做出规定,但对于电梯紧急制动工况,电梯运行速度发生的异常,即系统运行速度的瞬时最大速度,无相关要求。
在进行某型号制动器试验时,当轿箱内有125%额定载荷并以额定速度向下运行时,操作制动器,曳引机停止运转,但限速器-安全钳发生动作,现场检查发现限速器电气与机械均已动作。复位后,通过调整轿厢载荷,重复试验,发现制动器在失电开始到制动力完全释放前这段时间(下称“制动器延迟”),轿厢下行加速且瞬时最大速度已超过限速器允许的最大动作速度,从而导致限速器机械动作。通过PMT(Performance Measure Test,性能指标测试)仪器检测记录曲线,紧急制停时,轿厢下行时速度曲线出现明显“波谷”现象(图1)。通过示波器检测,制停系统的延迟时间符合 GB/T 24478—2009《电梯曳引机》中4.2.2.3条款规定要求,即制动器制停响应时间应≤0.5 s。
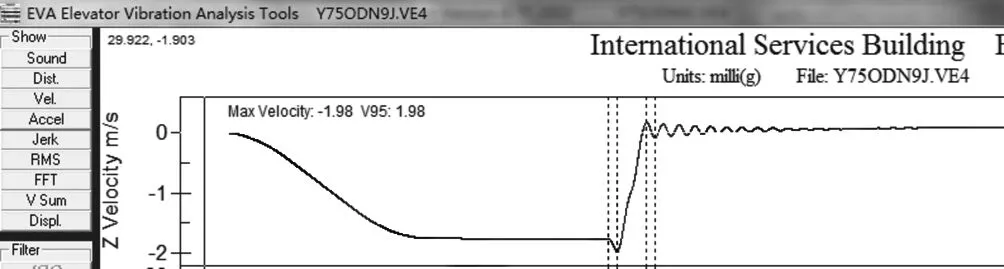
图1 轿内125%额定载荷下行紧急制停时速度曲线“波谷”
电梯紧急制停过程中轿厢速度出现异常,可能引起安全钳动作,严重时可能超过制动器的设计范围,导致意外损伤或安全事故,因此对制动器延迟期间轿厢速度的异常现象进行数理分析,对于电梯系统和制动系统的设计尤其重要。
1 紧急制停时速度异常的数理分析
1.1 紧急制停时角加速度与轿厢速度
基于理论力学的定轴转动定理[2],假设电梯系统为绕驱动主机曳引轴,即定轴转动的系统,在制动器失电瞬间,按定轴转动定理:刚体定轴转动的角加速度与它所受的合外力矩成正比,与刚体的转动惯量成反比。定理公式见(1)式。

式(1)中,M为电梯系统的不平衡力矩;J为绕定轴的系统转动惯量,为系统绕定轴转动的角加速度;α与M方向相同。忽略系统的主机及系统效率、导靴摩擦阻力等因素的影响,由式(1)可得出电梯系统在紧急制停时,制动器失电瞬间系统绕驱动主机曳引轴定轴转动的角加速度,见(2)式。

基于刚体绕定轴转动的动能定理[2],电梯系统绕曳引轴定轴转动的动能Ek见(3)式。

(3)式中ω为系统绕驱动主机曳引轴的定轴转动角速度,J为绕定轴的系统转动惯量。
基于式(1)(2)(3),可推导出在紧急制停过程中制动器失电瞬间,电梯系统绕主机曳引轴转动的角加速度α见(4)式。

假设电梯系统在紧急制停时制动器延迟时间为t,在时间t内,系统绕驱动主机曳引轴的定轴转动角加速度α可视为恒量,系统做均加速运动,可推导出,延迟时间t后系统绕定轴转动的瞬时角速度ω(t),见式(5),转换为轿厢线性运动的速度v(t)见式(6)。

式(6)中,D为主机曳引轮直径,r为电梯系统曳引悬挂比。通过式(6),可计算出制动器延迟时间t后,电梯系统的最大线速度。将v(t)与电梯系统所配置的限速器最大允许动作速度进行比对,从而对电梯系统和制动器设计进行核对,以保证设备在紧急制停时安全可靠。
1.2 紧急制停时电梯系统动能与不平衡力矩
假设电梯系统位于其设计提升高度的任意位置,且以系统额定速度运行时紧急制停,其系统不平衡力矩及运动能量计算公式如下,其中计算用相关参数汇总见表1。
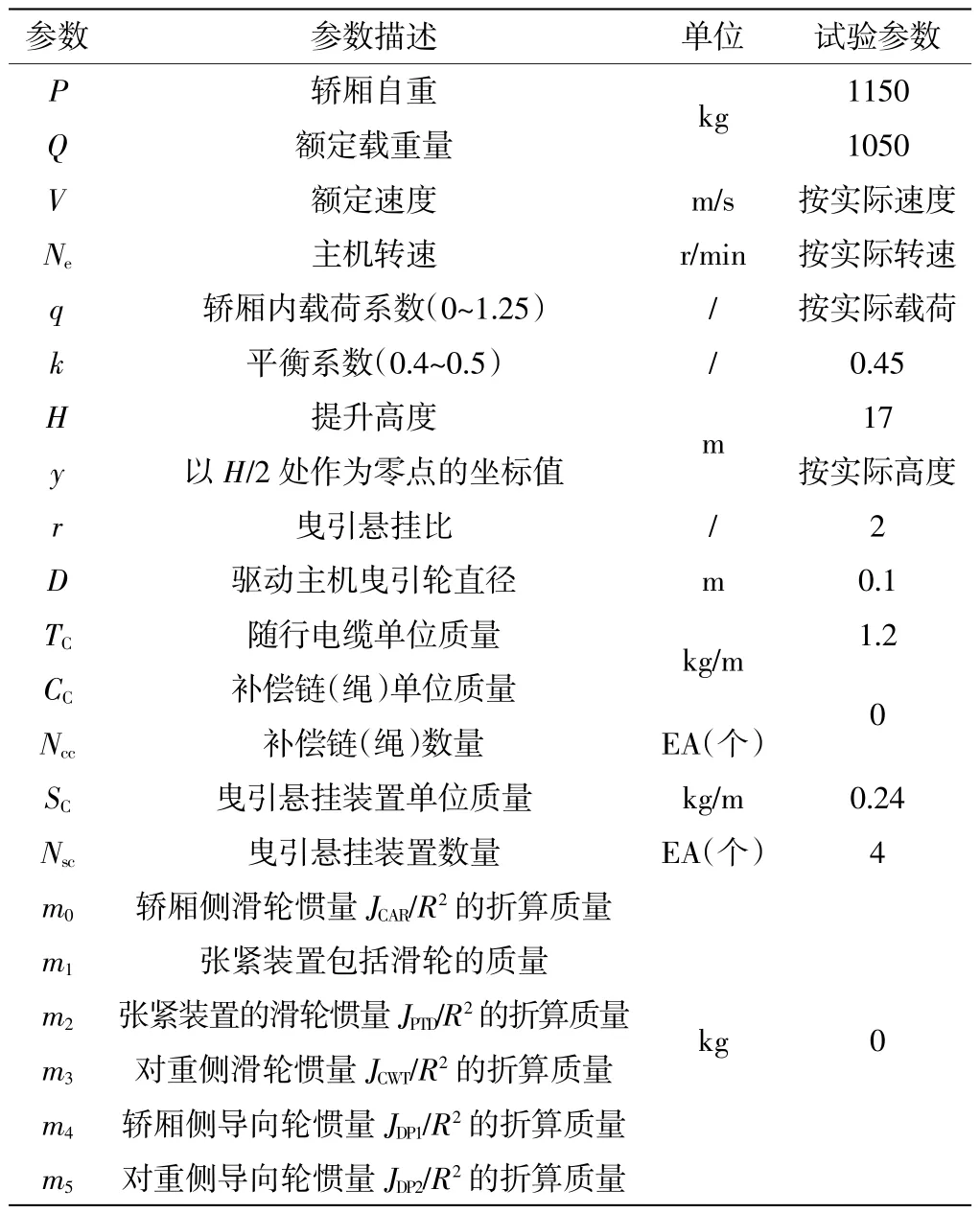
表1 相关参数
电梯系统的总运动能量为直线运行部件和转动部件的动能之和,可得出紧急制停时制动器失电瞬间电梯系统总运动能量Ek,见(7)式。

紧急制停时制动器失电瞬间的不平衡力矩,为电梯系统各部件相对曳引轴中心的力矩之和。假设系统不平衡力矩为M,轿厢侧部件相对驱动主机曳引轴的力矩为Mcar,对重侧相对驱动主机曳引轴的力矩 Mcwt,分别计算见式(8),(9),(10)。
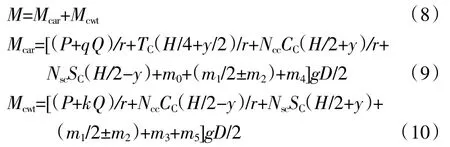
其中Mcar与Mcwt方向相反,M方向与系统运行方向相同。
2 紧急制停速度的理论计算与试验
试验样梯的相关参数见上表1中试验参数列。试验样梯为非钢丝绳曳引驱动电梯,无补偿绳和涨紧轮,轮组直径仅0.1 m,相关轮组转动惯量折算的质量相对较小,因此计算系统动能及不平衡力矩时,忽略m0~m5的影响。
基于式(6),可理论计算出3种试验工况,即轿内125%额定载荷下行、轿内100%额定载荷下行和空轿厢上行紧急制停时,在制动器延迟时间t后,轿厢的瞬时最大速度v(t)。
样梯理论计算的相关数据结果见表2。表2中,制动器延迟时间t为PMT记录曲线中,取加速度曲线开始突变点到轿厢最大速度所对应的时间差值,也可以通过示波器进行延迟时间t进行检测。紧急制停试验通过PMT仪器记录,三种紧急制停工况的轿厢速度曲线和加速度曲线见图1~6。
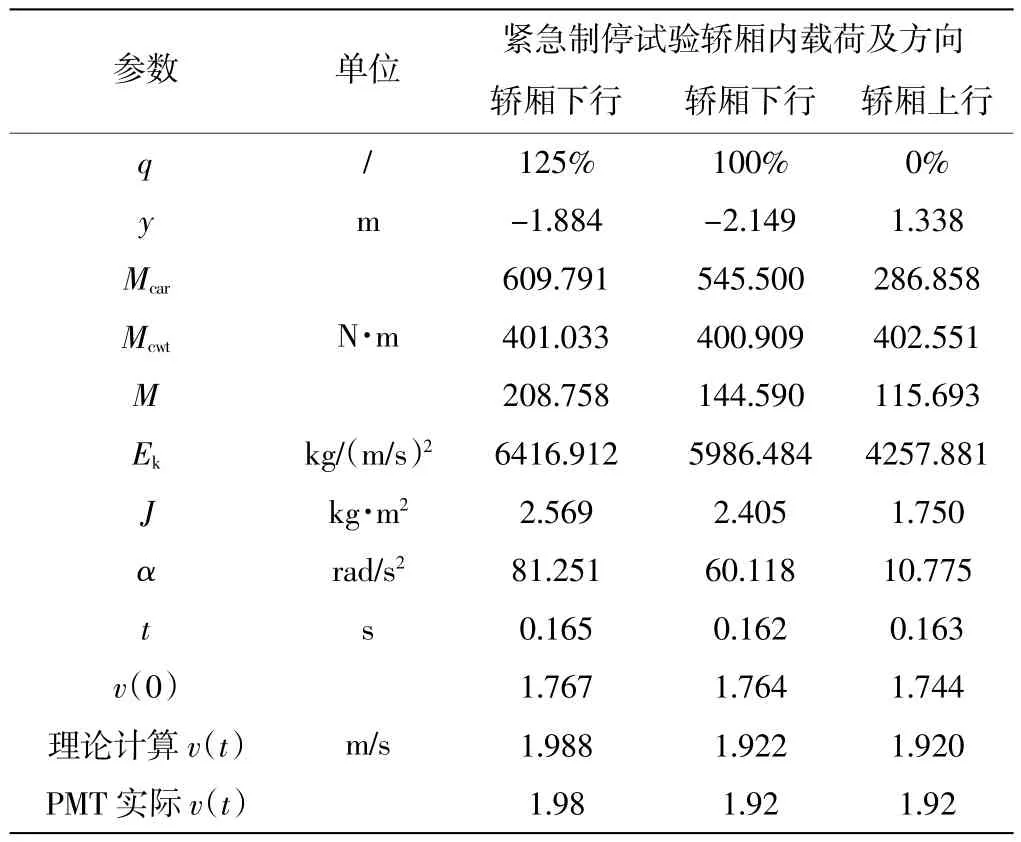
表2 紧急制停工况试验样梯的理论计算

图2 轿内125%额定载荷下行紧急制停加速度曲线
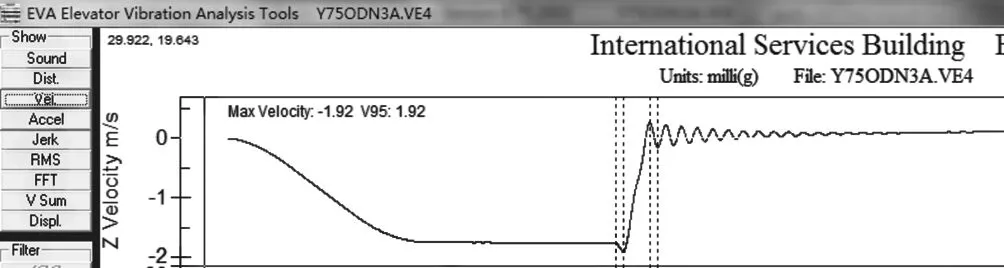
图3 轿内100%额定载荷下行紧急制停速度曲线
对比分析表 2 中理论计算 v(t)、PMT 实际测试 v(t),可得出4个结论。
(1)理论计算所得出的轿厢最大速度与PMT实际测试轿厢最大速度基本一致。
(2)轿内125%额定载荷下行紧急制停工况最为恶劣,轿厢瞬时速度最大。
(3)样梯的额定速度v为1.75 m/s,按GB 7588—2003中9.9.1规定,限速器动作速度理论范围为1.15v~(1.25v+0.25/v),即2.01~2.33 m/s。基于式(6),调整试验样梯系统的配置和参数,如平衡系数k,提升高度H,轿厢自重P,以及补偿绳(链)配置CC和Ncc等,轿内125%额定载荷下行紧急制停时,在制动器延迟时间t后,轿厢瞬时最大速度将达到2.05 m/s,超过标准要求的限速器动作速度的下限2.01 m/s。
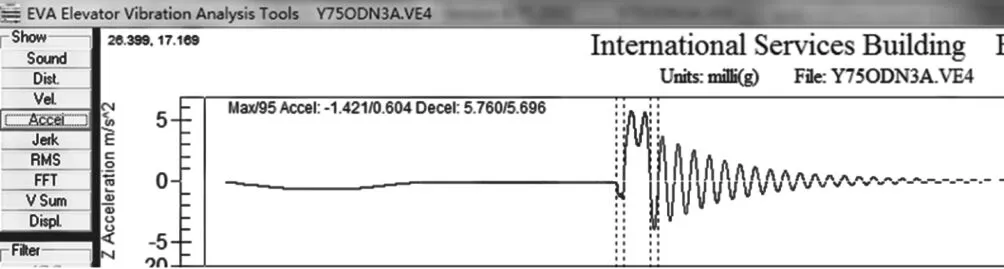
图4 轿内100%额定载荷下行紧急制停加速度曲线

图5 空轿厢上行紧急制停速度曲线
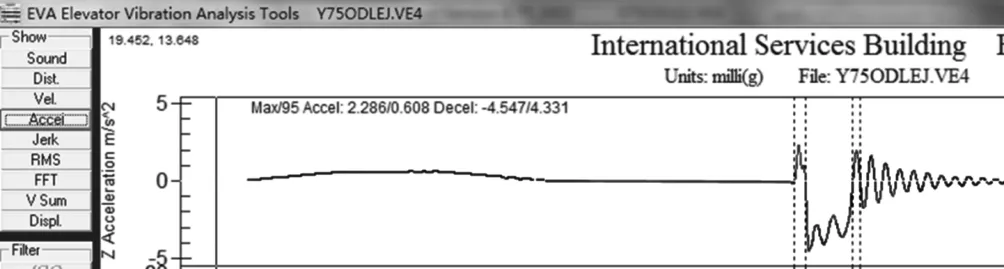
图6 空轿厢上行紧急制停加速度曲线
(4)按某品牌限速器出厂动作速度的企业标准要求,额定速度v为1.75 m/s时,限速器电气动作速度范围为2.05~2.09 m/s,机械动作速度范围为 2.15~2.19 m/s。按分析(3),轿内 125%额定载荷下行紧急制停时,在制动器延迟时间t后,轿厢瞬时最大速度仍可能超过限速器出厂设置的电气动作速度的下限。因此,在依据GB 7588—2003标准12.4.2.1和9.9.3条款规定要求,在进行制动器制停能力试验时,宜以限速器电气开关不动作作为要求,即电梯系统在紧急制停时,电梯系统的瞬时最大速度,不超过GB 7588—2003标准9.9.1条款规定的下限要求。
3 结语
本文所提出的制动器延迟期间,电梯系统绕定轴转动的角加速度和最大轿厢速度的方法,对于进一步研究电梯制动系统的相关设计,提供了系统计算的参考。在电梯系统紧急制动过程中,电梯系统的最大速度,宜以限速器电气开关不动作作为要求,即不超过GB 7588—2003标准9.9.1条款规定的下限要求。
按紧急制停时理论计算轿厢瞬时最大速度的方法,设计时需要优化制动器延迟时间,并综合考虑制动器反电动势电压和吸合噪音,确保制动安全和运行舒适性,同时在符合系统曳引力要求和系统成本允许的范围内,适当调整电梯系统的自重,补偿绳(链),平衡系数等参数,减小紧急制停工况系统的不平衡力矩和角加速度。
TU857
B
〔编辑 利 文〕
猜你喜欢
煤气与热力(2021年3期)2021-06-09
湖南邮电职业技术学院学报(2020年3期)2020-10-13
建筑机械(2020年3期)2020-04-22
液压与气动(2020年4期)2020-04-10
交通运输系统工程与信息(2020年1期)2020-02-28
科技创新导报(2018年7期)2018-05-07
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
试题与研究·教学论坛(2017年5期)2017-02-28
中国塑料(2016年8期)2016-06-27
