
基于单波束仰扫回波信号强度处理的船舶吃水检测技术
2018-01-10 01:07,,,,,d
船海工程 2017年6期
,,,,,d
(武汉理工大学 a.智能交通系统研究中心; b.能源与动力工程学院;c.国家水运安全工程技术研究中心; d.计算机科学与技术学院,武汉 430063)
基于单波束仰扫回波信号强度处理的船舶吃水检测技术
李吉祥a,b,周新聪b,初秀民a,c,陈德山a,c,陈先桥a,c,d
(武汉理工大学 a.智能交通系统研究中心; b.能源与动力工程学院;c.国家水运安全工程技术研究中心; d.计算机科学与技术学院,武汉 430063)
针对内河船舶超吃水引发的船舶安全问题,提出单波束声呐在水下仰扫,对目标船舶回波信号的强度值进行处理并滤除干扰误差,测量内河船舶动态吃水值的检测方法。采用自适应阈值法甄别仰扫单波束声呐发射到船底的回波信号,利用中值滤波滤除回波信号异常数据得到单波束声呐到目标船舶底部的距离,用测深传感器测得的水深值减去此距离得到船舶的实时吃水值。对不同吃水值的模拟船舶进行吃水测量实验,结果表明:该系统能够较为准确测量船舶吃水值。
船舶安全;船舶吃水;单波束;回波强度;自适应阈值法;中值滤波
随着船舶制造技术的提高和内河运输需求的增加,船舶正在朝专业化、大型化方向发展。受限于内河航道水深较浅、航道较窄等因素,船舶大型化带来了船舶超吃水航行的问题[1]。船舶超吃水航行既容易导致因船舶搁浅而造成船舶本身结构的损坏,也会因破坏航道而影响其他船舶的安全航行,因此,有必要对内河船舶进行吃水实时检测,形成对内河船舶吃水全方面监管,这是加强船舶和航道安全的有效手段[1-2]。
超声波具有很强的穿透力,在水中能量衰减小,检测精度较高,能够有效地远距离独立检测船舶吃水,声呐测量船舶吃水是比较具有应用前景的船舶吃水[3-7]。相关的研究[8-13]存在系统复杂、不易安装、价格昂贵和精确度不高的问题,且后台软件数据的二次开发受国外厂商限制。侧扫声呐安装需要一定的水深条件,不适合低水位航道下测量。单波束测船舶吃水的方法具有设备体积小,成本低,便于安装,后台数据可二次开发,易于应用到小型化平台上的优势[14-16],因此考虑采用单波束测深设备作为吃水检测设备,提出一种基于单波束仰扫回波强度信号的船舶吃水检测方法。该方法布置单个单波束声呐在船舶底部,声呐仰扫测量船舶底部目标,使用自适应阈值和中值滤波对回波数据进行处理,并设计实验验证本测量系统。
1 吃水测量系统设计
1.1 吃水测量原理
单波束声呐换能器放置在船舶底部向上发射声波,声波遇到船舶目标底部反射,反射声波到达声呐换能器接收,船舶经过的每个时刻其每个反射点通过声呐测深数据计算出距离值。以水面为x轴,单波束测深声呐至水面的垂线为y轴建立平面直角坐标系,见图1。
α和L由报文数据解析得到,H由水深传感器测量所得,A点处纵坐标为船舶吃水值。
以底部A点为例,其坐标计算公式为

(1)
记录每一帧数据所有反射点L×cosα的最小值,即纵坐标的最大值,此数值为该时刻的检测船舶目标的吃水深度值HD。
HD=max (y)
(2)
1.2 系统硬件组成结构
系统实验布置见图2。金属支架1水下部分沿着水池边墙垂直置于水中,水上部分固定于岸边。金属支架2水平放置,并与金属支架1通过转轴相连。单波束声呐放置在检测目标船舶下方,固定在金属支架2顶端,单波束声纳的检测方式为向上仰扫。压力测深传感器单波束声呐一侧,测量单波束声呐所在位置的水深值。通过缆绳的收放来控制铝合金桁架2的水平放置姿态。单波束声呐以串口通信的方式将声呐数据传输至岸边的声呐数据处理中心,声呐计算机数据中心接收到声呐回波检测信号并将其封装成相应的数据报文,声呐数据处理中心通过以太网网口通信TCP/IP方式传输数据至船舶吃水检测软件系统。
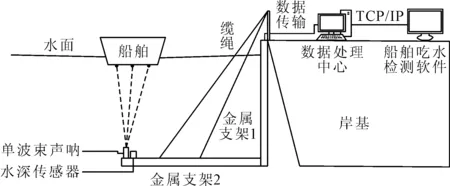
图2 系统布置示意
1.3 船舶吃水检测软件系统
基于以上硬件设备,设计船舶吃水检测软件,功能包括数据解析、数据处理、数据显示等功能。
软件基于VS2008平台。开始侦听按钮建立上位机软件和下位机声呐通讯连接,控制台操作通过控制台命令的编辑框输入控制命令,接通所有硬件声纳板电源,设置硬件声纳板关联。接着解析来自声呐数据中心的报文,提取出相关声呐回波检测数据,对该声呐完成数据的处理功能,包括回波数据的滤波、回波数据的成像显示、船舶吃水深度检测、吃水检测数据保存等功能。系统软件显示界面Depth值为测得到目标物的距离值,即声呐到回波障碍物距离,Draft值为实时计算得到的船舶吃水值,最大值为开始探测过程最大船舶吃水值。船舶吃水检测软件系统界面图和声呐图像、数据显示见图3。
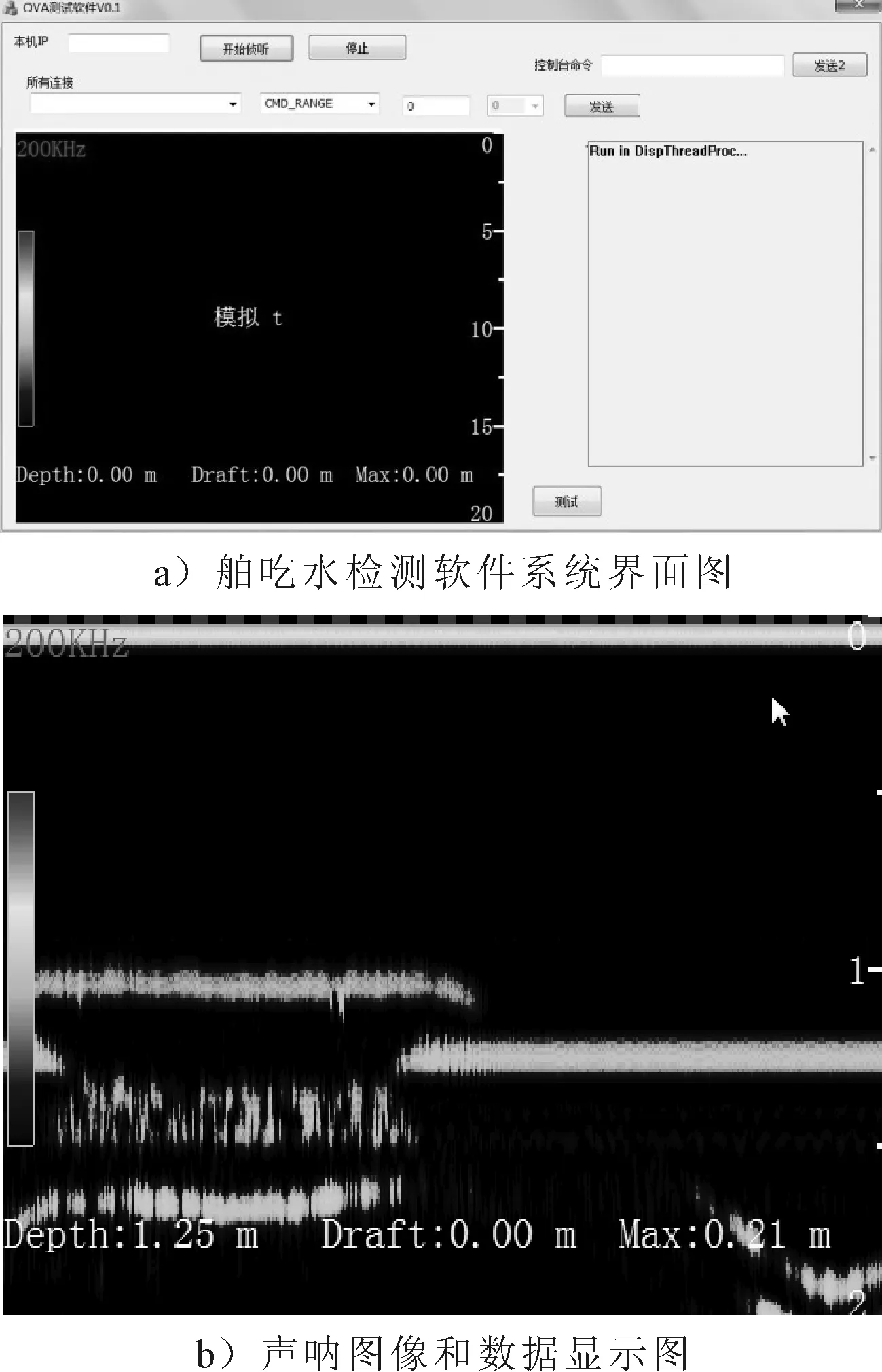
图3 软件系统界面图和声呐图像、数据显示
2 单波束声呐测量误差分析
2.1 仪器偏差和多次回波影响
声呐接收换能器同时可能会收到很多回波信号,这些回波主要是声呐脉冲多次反射后的余波,如图4中同一时刻存在多次回波,且多次回波的强度值相比第一次回波强度相当,甚至更强,导致声呐换能器在接收回波判断目标船舶底部真实回波时产生错误。同时当声波碰见鱼类、气泡和水草等异物时,在船底的第一次反射回波之前会出现强度较低的回波。实验时发现使用的赛洋COM9516单波束声呐由于本身误差和多次回波的影响,其自行解析测得的换能器到水面的距离值与实际值偏差很大,得到数据无法使用。比如,实际目标距离是1.29 m,声呐自行解析得到的距离最大值能达到15 m,导致计算船舶吃水值时数据无法使用。图4分别为多次回波声呐图像和声呐自行解析得到距离值。
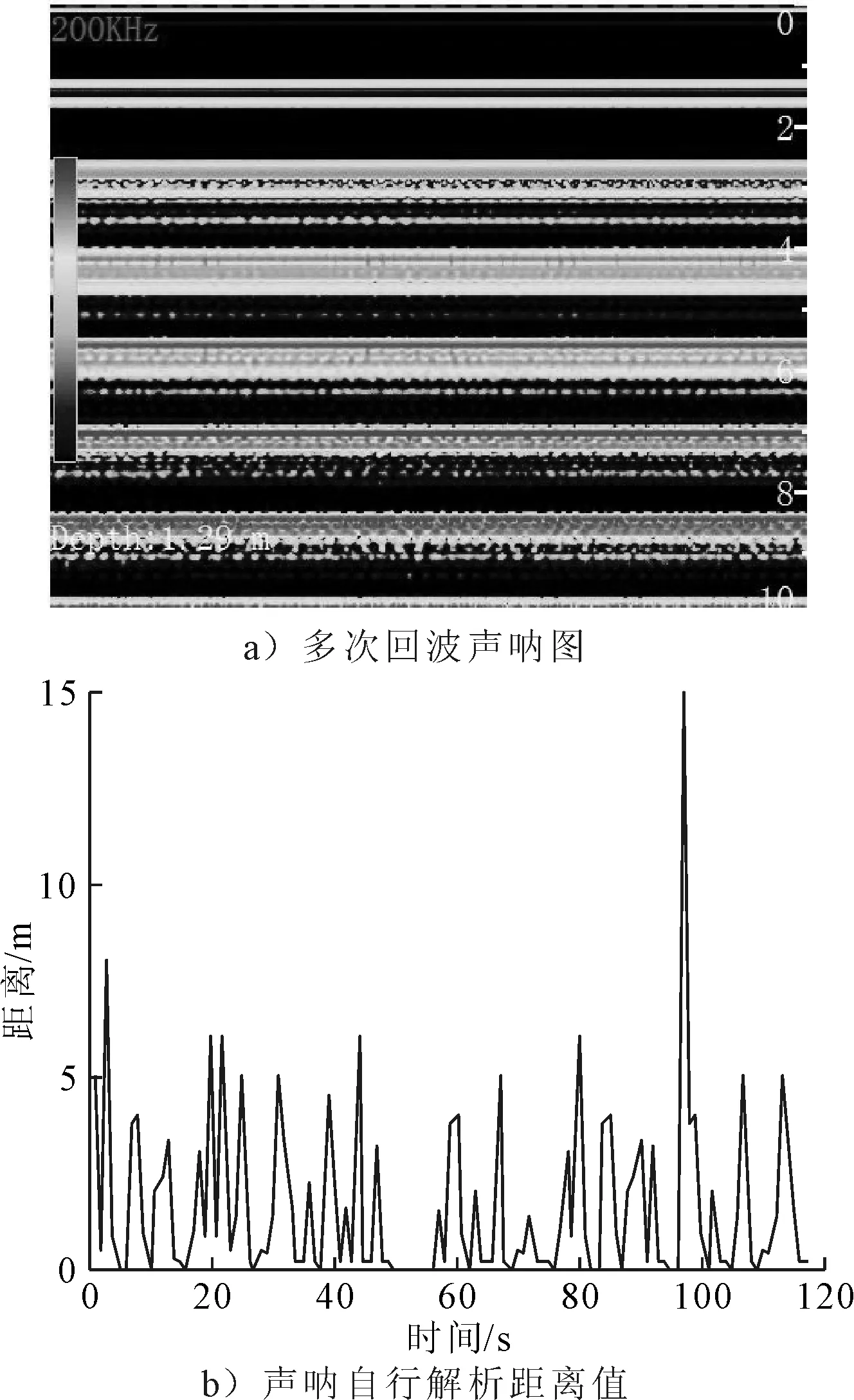
图4 多次回波声呐图和声呐自行解析得到距离值
2.2 回波干涉和时间增益影响
若干回波叠加,就会出现声波的干涉。若多个多次回波相叠加且刚好发生了相长干涉,则就会出现多次回波的点的回波强度与第一次回波强度相当甚至略大的情况。基于声波随传输距离增加会导致强度逐渐衰弱考虑,单波束测深仪系统自带修正声波衰减的线性时间增益,从而导致在近距离测量时多次回波会可能比第一次回波强度更强。若只把最强回波作为目标物回波计算测量距离,则计算得到距离值大于真实距离值。f1和f2为若多回波中的2个,发生相长干涉会使叠加后的回波f的强度值增加。见图5。
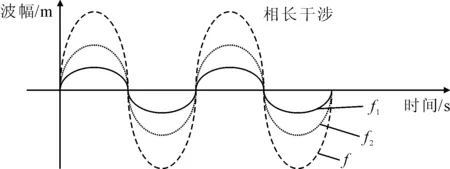
图5 回波相长干涉
2.3 其他异常数据产生原因
由于水面之下坏境复杂,测量会受到多种外界因数的影响,产生大量异常数据。异常数据干扰的主要来源有:水下鱼群、水草、气泡的环境影响,水面波浪、船只晃动的影响。同时换能器在复杂实际水下环境中发射和接收声波,经过一段时间后测得的时间t会发生小幅度波动也可能会产生偏差较大的随机离散值误差。
3 声呐回波数据处理
3.1 多次回波干扰处理
针对多次回波问题,根据接收到的每一帧数据可以得到换能器工作面垂直方向上500个回波数据的强度Buf值。这500个回波强度中包含了第一次正确回波在内的多次回波数据和噪音数据。从500个回波数据中找到第一次正确回波的强度数据信息,并根据量程参数命令计算出当前帧的距离L值,具体计算公式为
L=n×d
(3)
式中:n为回波点在数组Buf中的序号;d为当前回波帧分辨率,d=rang/500,rang为当前量程。
通过对声呐回波强度等级分析的方法也可滤除部分水下异物干扰。声波碰见鱼类、气泡和水草等异物时,反射回强度较低的回波。实验发现,当出现鱼类、气泡和水草等体积较小、反射面介质相对柔软、声波反射面较小时,反射的杂波波峰强度数量等级在80以下,正常船底钢铁介质反射回波波峰强度数量等级至少会大于150。因此以100强度值作为判断条件,可滤除回波波峰小于100强度值数据以消除鱼类、气泡和水草等的干扰。
3.2 回波干涉和时间增益干扰处理
提出用自适应阈值计算方法来确定目标真实回波在500个回波点中的范围区间,再得到的阈值区间计算出换能器到目标物原始距离数据。换能器的发射声波设备在水下需要密封保护,密封的橡胶层也会产生回波,实验分析后首先滤除前40个密封橡胶层的回波点数据。由于每帧回波强度数据都在一个数量级上,所以只需找到当前帧的剩余460个回波点最大值就可以计算此帧回波的强度值范围,这里称此范围为回波峰。第一次出现的回波峰的顶点就是第一次回波点,即真实目标船舶回波。
声呐数据回波强度构成的回波峰图见图6,阈值计算算法的流程见图7。
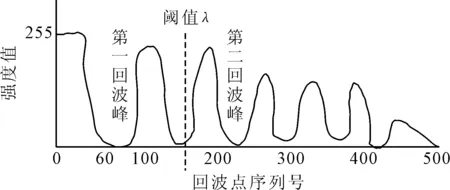
图6 声呐回波强度说明
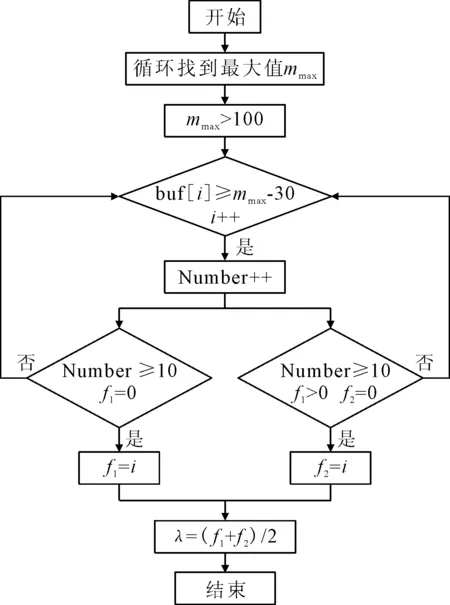
图7 阈值计算算法流程
3.3 随机误差干扰处理
针对随机误差来源分析,这种数据波动和偏差导致计算得到的船舶吃水值存在小幅度波动或出错,为了剔除这种错误值和减小偏差波动,采用中值滤波算法。中值滤波算法的流程图如图8所示,N为待处理数据数。
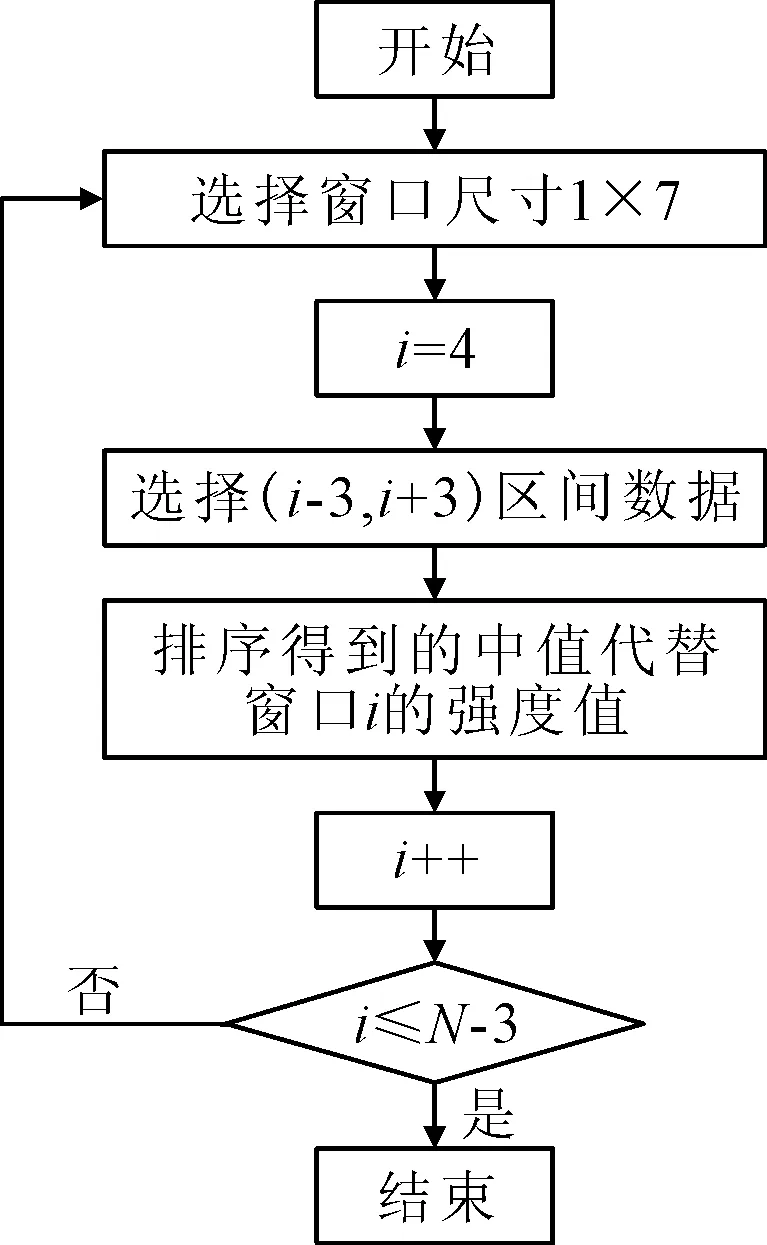
图8 中值滤波算法流程
4 实验结果及分析
为了验证本船舶吃水测量系统测量的准确性和针对误差提出的算法的有效性,在水深约2 m的实验水池对长1.00 m、宽0.60 m、高0.35 m的模拟船舶的铁箱进行吃水值实验。实验现场和设备见图9。
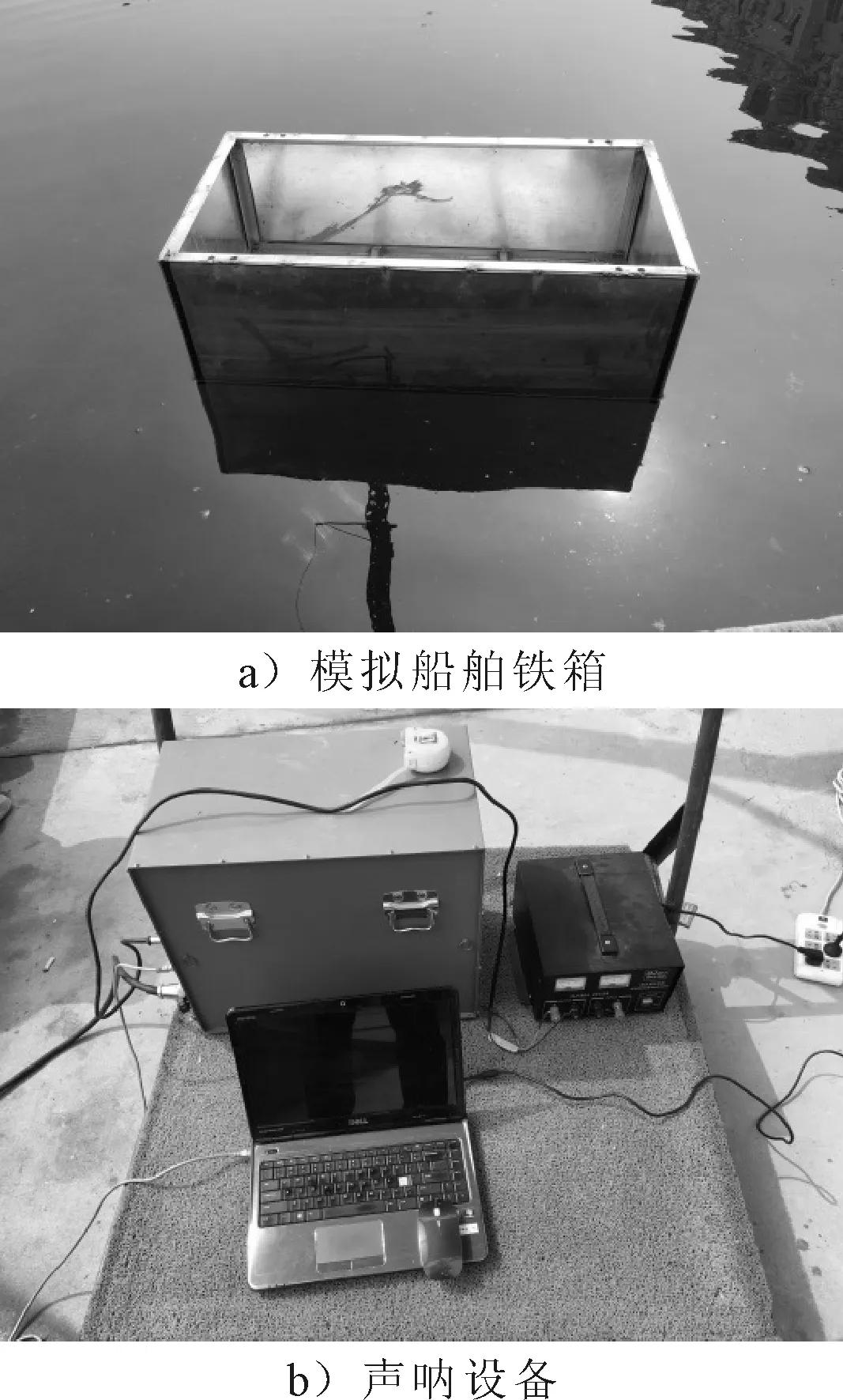
图9 实验现场和设备
4.1 系统测距方法的验证实验
对真实距离为1.29 m的目标物进行探测实验。设置水面平静无干扰、声呐探测正上方放置部分杂草和制造波浪、气泡3种实验场景。声呐图像Matlab数据分析对比结果见图10。

图10 声呐探测数据分析
结果发现,水面平静时声呐测量结果在真实距离1.29 m周围小幅度波动,测量距离与真实距离值的最大误差小于3 cm,最大相对误差小于3%,未出现多次回波和回波干涉造成的较大错误数据;中途加入较大水草异物时,声呐图像显示第一次目标物的回波前会有大量杂波,经过该方法处理后的数据图相应位置数据波动变化不大,测量距离与真实距离值的最大误差小于6 cm,最大相对误差小于5%,滤除了水草异物的影响;人为制造水波浪和气泡时,声呐图像第一次目标物回波前会有强度少量回波,该方法处理后的数据图相应位置数据波动变化不大,测量值与真实距离值的最大误差小于5 cm,最大相对误差小于4%,滤除了水波和气泡的影响。
因此,单波束自适应阈值法和回波强度分析方法能够较好解决单波束存在的多次回波和回波干涉的问题,且当存在水草、波浪、气泡异物影响时,本文提出的基于单波束仰扫回波强度信号的船舶吃水检测系统也可以较为准确测量到声呐到目标物的距离值。
4.2 不同吃水值的测量实验
为验证中值滤波算法和系统测量船舶吃水的有效性,设计了模拟船浸入水中0.15 m、0.2 m和0.25 m 3种情况的实验。在已经验证的自适应阈值法和回波强度分析方法对声呐回波数据处理的基础上,对回波数据进行中值滤波处理,计算船舶吃水。3种情况下的吃水值数据变化及误差分析见表1。
在3种不同情况下测量的吃水值与真实值误差最大不超过1 cm,得到的数据较为准确,达到了船舶吃水的准确测量。

表1 吃水值误差分析表
5 结论
基于单波束仰扫回波强度信号处理的内河船舶动态吃水检测方法所需设备简易、成本低、可维护性高、数据处理量小。针对误差分析,采用自适应阈值法和回波强度信号分析甄别目标船底的回波信号,对其他异常数据进行中值滤波处理。进行了水草异物和波浪气泡干扰实验、不同船舶吃水情况的测量实验,吃水测量结果与真实吃水值对比,测得船舶吃水值与真实吃水值比较偏差较小、结果稳定、测量迅速,表明该方法可以较好地解决存在的多次回波、回波干涉、水下异物、离散数据等因素的干扰问题,为航道和船舶安全监测提供技术支持。
在更加恶劣的实际水下环境中系统测量数据所受干扰更加严重,例如船舶底部附着密度较大的壳体生物的影响,因此接下来的研究中需要考虑的因素更多,需优化数据处理算法。同时需要考虑工程实际中换能器的清理和金属支架结构的腐蚀的问题。
[1] 赵溦,李益琴.内河船舶超吃水问题及检测技术研究[J].中国水运,2015,15(12):20-21.
[2] 苏华.船舶吃水动态检测方法的研究[D].武汉:武汉理工大学,2008.
[3] 马晓波,杜柏松,戴冉.一种船舶吃水测量尺的设计[J].船海工程,2016,45(3):35-38.
[4] 朱四印.移动式船舶动态吃水检测系统的研究[D].大连:大连海事大学,2015.
[5] 陈德山.基于多波束仰扫的内河船舶吃水检测技术[J].水运工程,2016(1):153-156.
[6] SUN G Y, MAO Q H. Study on automatic determining ship’s draft and stability parameters[J]. Navigation of China,2002(2):28-30.
[7] 高延增,叶家玮,陈爱国.用于水下机器人的主动侧扫声呐图像预处理技术[J].船海工程,2009(2):97-100.
[8] 李鑫立.基于多波束测深声纳的船舶吃水自动检测技术研究及实现[D].武汉:武汉理工大学,2015.
[9] 王静怡,黄其捷,刘志强,等.基于多波束侧扫声纳技术的船舶吃水深度自动检测系统:CN103675823A[P].2014-03-26.
[10] 邬佳伟,朱昌平,范新南,等.基于侧扫声纳的船舶吨位测量技术研究及应用[J].应用声学,2013,32(1):23-27.
[11] 储新隆.单波束声呐在内河过闸船舶吃水深度测量上的应用[J].交通科技,2016(1):171-172.
[12] 吴俊,丁甡奇,余葵,等.内河离港船舶吃水在线动态扫描检测方法[J].水利水运工程学报,2013(5):83-88.
[13] 罗宁.内河船舶吃水自动检测装置研究及应用前景[J].中国水运,2012,12(2):86-88.
[14] MUDI X, SIYIN Z, LU L, et al. Research on data processing method of real-time detection system for dynamic ship draft[J]. Chinese Journal of Scientific Instrument,2012,33(1):173-180.
[15] 刘力.单波束测深仪水深粗差检测与修正算法及其效果[J].水运工程,2014,14:44-45.
[16] 杨梦云.影响单波束测深仪测量精度的因素及消除措施[J].人民长江,2012,43(21):46-48.
Ship Draft Detection Technique Based on Single Beam Echo Intensity Signal Processing
LIJi-xianga,b,ZHOUXin-congb,CHUXiu-mina,c,CHENDe-shana,c,CHENXian-qiaoa,c,d
(a.Intelligent Transportation System Research Center; b.College of Energy and Power Engineering; c.National Engineering Research Center for Water Transport Safety; d.College of Computer Science and Technology, Wuhan University of Technology, Wuhan 430063, China)
Aiming at the safety problem of ship caused by over draft in inland river, a method was presented to detect the intensity of the echo signal of the target ship, remove the interference error and measure the dynamic draft value of the river ship. The adaptive threshold method was used to identify the echo signal emitted from the single-beam sonar to the bottom of the ship. The anomalous data of the echo signal was filtered by the median filter to obtain the distance from the single-beam sonar to the bottom of the target ship. The resulting water depth minus the distance could give the real-time ship draft value. The experimental results showed that the system can accurately measure the ship’s draft value.
ship safety; draft; single beam; echo intensity; adaptive threshold method; filtering
U661.75
A
1671-7953(2017)06-0012-06
10.3963/j.issn.1671-7953.2017.06.003
2017-02-18
2017-03-08
湖北省自然科学基金(2015CFA111);武汉理工大学自主创新研究基金(2015IVA060)
李吉祥(1991—),男,硕士生
研究方向:船舶安全、船舶信息化
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年11期)2022-07-15
信息通信技术(2022年2期)2022-05-31
建材发展导向(2021年19期)2021-12-06
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
临床骨科杂志(2020年1期)2020-12-12
舰船科学技术(2020年3期)2020-04-22
海军航空大学学报(2019年1期)2019-04-29
