
危化品仓库激光扫描监控系统的设计
2018-01-18 02:15刘学君袁碧贤
自动化与仪表 2017年4期
刘学君 ,李 京 ,2,卢 浩 ,2,袁碧贤 ,2,戴 波
(1.北京石油化工学院 信息工程学院,北京 102617;2.北京化工大学 信息科学与技术学院,北京 100029)
随着社会物流业的发展,物流仓储的安全性变得越来越重要[1]。其中仓储危化品由于易燃易爆、有毒、放射性、腐蚀性,具有极大的潜在危险[2],因此更受关注。2015年天津港8·12特别重大火灾爆炸事故[3]犹如一声晴天惊雷,再次拉紧人们的神经,敲响了警钟。因此,对危化品仓库设置一套安全监测系统,预防此类事故的发生是十分有必要的。
目前针对危化品仓库安全监测的主要方法有视频监控、室内定位技术、基于图像的三维重构[4]。但是,视频监控主要依赖于工作人员在屏幕前的坚守,容易造成视觉疲劳和身心疲倦。室内定位技术的定位误差还比较大,技术成本高。基于图像的三维重构受限于当前硬件设备的性能,不便于推广。因此,本文设计了一套危化品仓库激光扫描系统,用来对危化品仓库进行安全监测。
1 系统结构
危化品仓库激光扫描系统结构由激光扫描点、环境参数监控点、ARM客户端、组态王、服务器组成,结构示意如图1所示。激光扫描点和环境参数监控点是分节点,分别与电源连接,且通过CAN总线与主节点ARM客户端连接。ARM客户端通过Modbus485总线把数据发给组态王显示,在库房监控主节点可以通过组态王看仓库内情形。服务器上位机通过以太网与主节点客户端连接,下发控制或请求数据指令,接收监控数据。

图1 危化品仓库激光扫描系统结构示意Fig.1 Schematic diagram of laser scanning system for dangerous chemicals warehouse
2 分节点部分
激光测距模块测得激光发射口与激光遇到的遮挡点的距离,编码器记录激光扫描时的角度值,也就是说激光扫描到一点,就同时接收到距离值和角度值,硬件结构如图2所示。步进电机为激光扫描提供电力驱动,使得激光扫描运行。上电后产生周期性的信号发送给驱动芯片,经驱动芯片传给细分驱动之后控制步进电机的运动,同时步进电机通过蜗杆带动云台上的激光测距仪的扫描和云台下的编码器的运动,将扫描得到的距离值和对应的角度值通过RS-232总线发送给TIVA,并将数据汇总通过CAN总线传到主节点ARM客户端[5],进行处理分析。

图2 激光扫描点示意Fig.2 Schematic diagram of laser scanning point
通过对角度和距离数值的处理与分析,如遇障碍,可以识别出障碍物的形状与尺寸。激光扫描会得到很多组距离值和角度值,采用最小二乘法数据拟合,通过曲线长度公式计算可得到障碍物的尺寸。数据拟合采用的算法为最小二乘法。设逼近函数为[6-7]

式中:原始数据点为(xi,yi),求使方差取得最小值的(a0,a1,…,an),进而得到逼近函数。曲线长度积分公式为[8]

实验结果误差在20 mm~30 mm之间,满足危化品仓库安全要求。
每个激光扫描仪能扫描一个面,如图3所示,多个激光扫描仪能扫描多个平面。把多个激光扫描仪按三维细分放置,可得仓库多个扫描平面,这样能全方位监测危化品仓库安全状态。初始化运行,记录正常状态时的数据,得到初始数据库。当数据异常时警醒报警,并在某个监控探头遇到障碍物时,把它所扫描的面得到的异常数据上传,结合其他探头得到的数据进行处理和运算,即可推算障碍物的外形和尺寸。

图3 多激光点扫描示意Fig.3 Schematic diagram of multi laser spot scanning
环境参数监控点结构如图4所示,包括可燃气体传感器、湿度传感器、温度传感器、有毒气体传感器和振动传感器等,能实时监控仓库相关的环境物理参量,将其转换成数字信号传送到德州仪器ARM芯片TIVA,TIVA对接收到的环境监测传感器上传的信号进行汇总,通过CAN总线传到主节点ARM客户端,进行处理和分析。

图4 环境参数监控点示意Fig.4 Schematic diagram of environmental parameter monitoring points
分节点及通讯程序流程如图5所示。当激光扫描仪开始扫描时,首先判断是否有上位机指令,上位机会下发监控状态或初始扫描状态指令,改变系统运行状态。然后通过SPI总线程序读取编码器角度值,串口程序读取激光器扫描距离值,存入对应数据组,最后每隔10 s,数据通过CAN总线上传上位机监测数据1次。
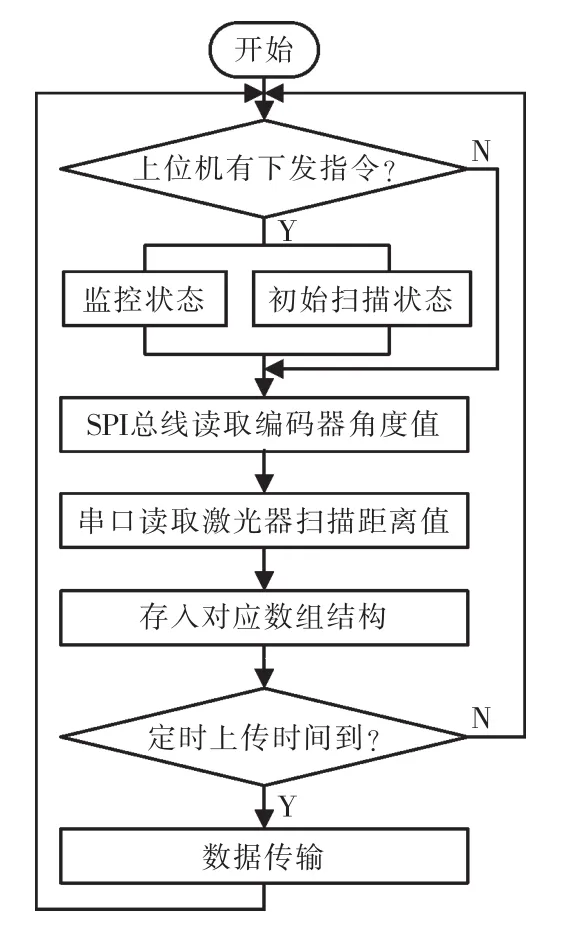
图5 分节点及通讯流程Fig.5 Sub node and communication flow chart
3 主节点部分
主节点与服务器通讯程序流程如图6所示,当设备开始运行时,如果服务器下发控制指令或请求数据指令,则根据不同的指令确定执行相应的子程序。然后,每隔10 s,所有监控数据通过以太网上传1次到服务器。

图6 主节点与服务器通信流程Fig.6 Main node and server communication flow chart
系统主节点配备RS-485串口与MCGS触摸屏相连;采用Modbus通讯协议,实时传递仓库内部的堆垛检测情况及温度检测状态,Modbus通讯协议是工业上通用的控制器网络协议,通讯时各数据根据结构不同存储于不同通道中,比特点位数据存储于继电器通道,其他类型数据则存储于寄存器通道,并在存储前声明各数据结构类型。这里触摸屏仅作为状态显示元件,接收由主节点传达来的各堆垛温度信息、总堆垛数、问题堆垛数以及报警堆垛编号,其他涉及状态显示的比特位有总堆垛情况、温度报警情况;共计占用2个输出继电区点位,12个输出寄存器字节。
MCGS触摸屏设计的组态王显示界面如图7所示,当堆垛状态异常时对应货位在显示界面上转变为红色。
4 服务器部分
服务器端LabVIEW程序包含TCP/IP通讯模块、数据交换模块、监控数据显示模块以及下发控制指令模块,结构如图8所示。TCP/IP通讯模块打开给定的服务器端口并侦听数据,将PC机设定为TCP连接的服务器端,TCP/IP通讯模块接收主节点发送的字符串并保存至数据交换模块;数据交换模块根据通讯协议将所需的目前监控状态、报警信息等进行提取进而在监控数据显示模块上予以显示。当用户需要下发控制指令时,下发控制指令模块根据通讯协议形成相应的控制字符串,借助通讯模块实现对主节点的控制,此外数据交换模块也会对所下发的控制指令予以保存,便于用户系统管理。
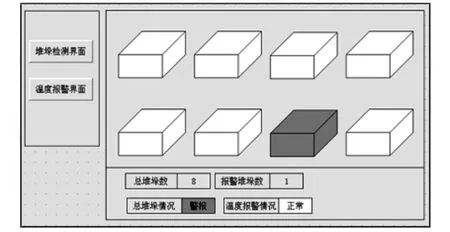
图7 组态王界面Fig.7 Kingview interface

图8 服务器程序系统结构Fig.8 Structure diagram of the host computer system
服务器控制端LabVIEW程序中,创建TCP侦听器函数作为侦听器并等待位于服务器7123端口的TCP连接。待连接建立后,服务器接收来自主节点ARM客户端的数据并保存为Database的字符串变量;依据通讯协议,服务器可分析Database保存数据中所包含的系统工作状态。当服务器端需要下发控制指令或请求扫描数据库数据时,可点击前界面内的对应按钮,使用写入TCP数据组件下发控制字符串,完成对主节点ARM客户端的控制。
服务器运行界面如图9所示,用户选择不同的库房选项来观察各库房运行状况,库房内堆垛状态以不同颜色予以区分,当堆垛正常时为绿色,当堆垛出现报警时相应堆垛监控区将显示为红色;系统下发控制指令时需选择所要控制的扫描仪起止编号及工作状态,点击下发控制指令发出控制指令字符串;当需要调用系统基础数据库时可选择对应扫描仪编号,点击请求数据库指令下发请求字符串。
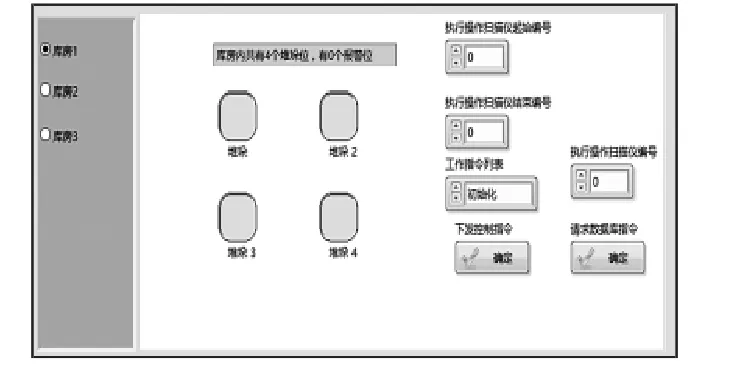
图9 系统前面板示意Fig.9 Schematic diagram of the system front panel
5 结语
本文设计了一套危化品仓库激光扫描监控系统,保障危化品仓库的安全,防止发生火灾爆炸及其他安全事故。系统包括分节点、主节点和服务器。分节点有激光扫描点和环境监测点,把收集到的相应参量的数据定时通过CAN总线传送给主节点ARM客户端,主节点将这些数据进行处理和分析,在组态王界面显示,并通过以太网传送给服务器。服务器端下发控制指令,为管理员提供监控数据显示,实现异常状态报警。实际试验表明,该系统能很好地实现对仓库安全状态的监控的预期目标。
[1]柴保身.我国危险品仓储业发展现状与展望[J].物流工程与管理,2009,31(12):19-23.
[2]江帆.危险化学品仓储堆垛安全距离的三维网格化监测技术研究[D].北京:北京化工大学,2016
[3]天津港“8·12”特别重大火灾爆炸事故调查报告公布[J].消防界:电子版,2016(2):35-40.
[4]刘学君,江帆,戴波,等.基于激光测距仪的危化品仓库堆垛安全距离的网格化监测方案[C]//中国自动化大会,2015.
[5]刘学君,江帆,戴波,等.基于ARM的危化品仓库堆垛安全距离监测装置的研究与开发[J].制造业自动化,2016,38(4):11-14,25.
[6]徐亦唐.基于最小二乘法的曲线拟合及其在Matlab中的应用[J].电子世界,2013(10):102-103.
[7]陈良波,郑亚青.基于最小二乘法的曲线拟合研究[J].无锡职业技术学院学报,2012,11(5):52-55.
[8]同济大学数学教研室.高等数学[M].北京:高等教育出版社,2000.
猜你喜欢
南京航空航天大学学报(2022年6期)2022-12-25
江苏安全生产(2022年8期)2022-11-01
江苏安全生产(2022年4期)2022-05-23
水上消防(2021年5期)2022-01-18
装备维修技术(2021年37期)2021-11-03
磷肥与复肥(2021年7期)2021-08-31
水上消防(2020年4期)2021-01-04
物流技术与应用(2020年1期)2020-03-16
中国设备工程(2019年22期)2019-12-19
现代电子技术(2019年15期)2019-08-12
