
半独立路权模式下现代有轨电车通过能力计算与仿真研究
2018-01-25 23:33黄江彦
现代城市轨道交通 2018年1期
黄江彦,何 曦
(西南交通大学交通运输与物流学院交通工程系,四川成都 611756)
0 引言
现代有轨电车运行在专用轨道上,是采用平交道口、信号优先的中低运量轨道交通系统[1]。电车路权分为全封闭路权、半独立路权和和混行路权 3 种形式,其中半独立路权是指有轨电车在一般路段上与道路交通完全隔离,而在交叉口与道路交通分享路权的形式[2],应用最为广泛。
目前,国内外有关现代有轨电车的研究已有不少,在有轨电车信号配时方案设计、行车组织设计、运行图编制等方面均有一些研究成果[3-16],但对于衡量有轨电车运营效率的一项重要指标——通过能力的研究相对较少,且缺乏系统的定量计算。因此,有必要对现代有轨电车通过能力做出全面深入的研究。
1 现代有轨电车通过能力概述
借鉴城市道路中机动车通行能力[17]的定义以及铁路列车通过能力[18]的定义,将现代有轨电车通过能力定义为:在一定的电车类型、信号设备和行车组织方法以及一定的道路、交通、管制条件下,有轨电车在单位小时内通过道路上某一断面的最大车辆数。半独立路权模式下的有轨电车在一般路段上独立行驶,而在交叉口与其他社会车辆共用路权,这种行驶特征既区别于城市道路上随意性很大的机动车辆,又区别于在铁路上稳定运行的列车,可以说有轨电车介于两者之间。因此,对于有轨电车通过能力的计算,首先要有理论体系的支撑,其次由于道路行驶中还存在一定的随机性,所以,还需采用仿真技术真实地模拟其运行情况。本文通过理论计算与仿真技术的结合,对现代有轨电车通过能力进行准确的估计。
2 理论计算
基于半独立路权的行驶模式,有轨电车在线路行驶中,主要存在交叉口信号控制方式、站台形式与停站方式、折返站形式与折返方式、行车区间这几类影响因素。因此,有轨电车通过能力的计算由这 4 类影响因素综合计算得到,即分别计算各瓶颈处的通过能力,取最小值作为整条线路的通过能力,即:有轨电车线路通过能力 = min{交叉口通过能力,车站通过能力,折返能力,区间通过能力}。
2.1 交叉口通过能力
该研究中有轨电车运行采用固定信号配时策略,因此,运行状态可以类比普通车流信号控制交叉口1条直行车道通行能力的计算方法:

式(1)中:T为信号灯周期,s;tg为信号有轨电车相位绿灯时间,s;t0为绿灯亮后第 1 辆车启动、通过停车线的时间,s;t是有轨电车通过停车线的平均时间,s;φ是折减系数。
2.2 车站通过能力
有轨电车站台有 2 种典型布置方式:侧式站台和岛式站台。由于侧式站台换乘方便、投资较少,适用性更广。因此,选择侧式站台为研究对象,更具有普遍性。
电车通过站台具体过程为:有轨电车在区间以最高运行速度行驶并进入车站,停站上下客,再发车离开站台。总时间包括减速进站时间、停站上下客时间以及加速出站时间(图 1)。
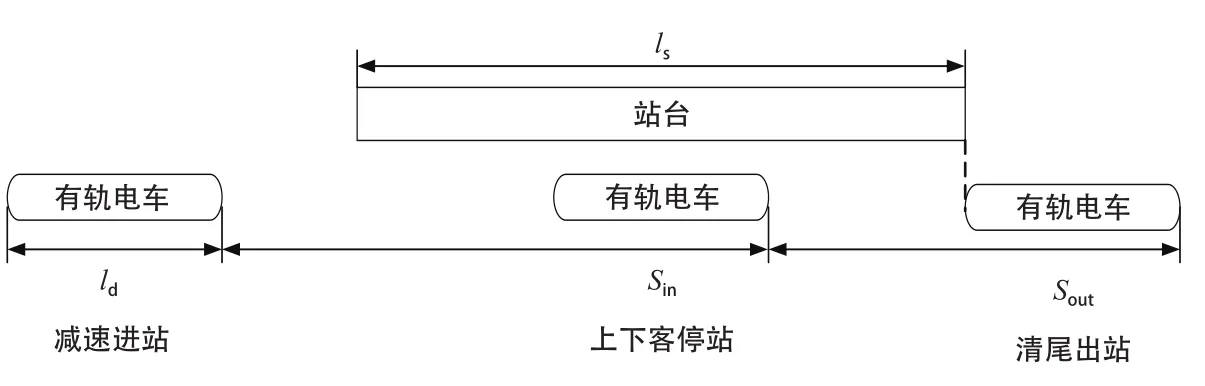
图1 有轨电车停站示意图
设tw为有轨电车停站上下客时间,s;vstation.max为站台区域内允许行驶的最高速度,m/s;ls为有轨电车站台长度,m;ld为有轨电车列车长度,m;ade为有轨电车常减速度,m/s2;aac为有轨电车常加速度,m/s2。
有轨电车减速进站时间为tin=vstation.max/ade,减速运行的距离为Sin=v2station.max/ 2ade,停站后正常加速出站经过的距离为Sout=ls/ 2+ld,发车至列尾出清站台的时间为因此,1 列有轨电车通过单一站台的时间为ts=tin+tw+tout,有轨电车在车站的最大通过能力为列 / h,其中表示向下取整。
2.3 折返能力
分析电车折返能力,应从折返作业流程的解析研究入手,由折返所需时间得到有轨电车在不同形式折返站的折返能力,进而得出该因素影响下的有轨电车通过能力。
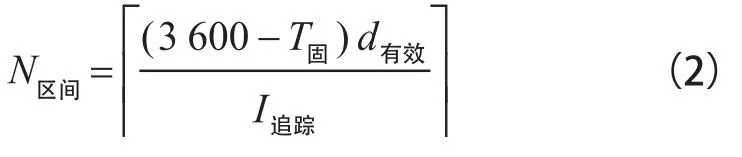
电车折返形式主要有 4 种:站前单、双线折返,站后单、双线折返(图 2)。
电车折返具体流程不作详细叙述,以站后单线折返为例,统计折返过程各个子作业时间,即可得到车站折返能力为折返总时间,s。
2.4 区间通过能力
对于区间通过能力的计算,有 2 种方法:一是直接计算法,二是运行图反馈优化编制方法。
2.4.1 直接计算法
借用铁路行车组织中区间通过能力的计算理论[17],应用直接计算法可按如下公式:
式(2)中:T固为固定作业时间,指必要的列车慢行和其他附加时分;d有效为有效度系数,指列车受运行偏离、调度调整等因素影响产生技术损失后,区间时间可供有效利用的系数,取0.88~0.91;I追踪为追踪列车间隔时间。
2.4.2 运行图反馈优化编制方法
上述直接计算法使用的是经验公式,且该公式纯属理论,没有考虑到线路本身的各种特点,计算结果可能会产生较大的偏差。因此,提出另一种能够对区间通过能力进行更为准确计算的方法,即通过构建列车运行图反馈优化模型求解区间通过能力。
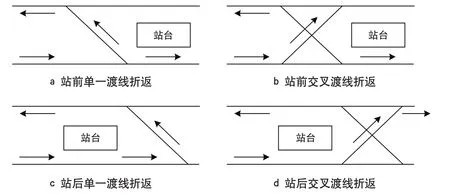
图2 折返站折返方式示意图
运行图是运用坐标原理对列车运行时间、空间关系的图解表示,是对列车运行时空过程的图解,其中,横坐标表示时间,纵坐标表示距离[18]。为了能直观展示电车运行和交叉口信号控制信息,在运行图中加入交叉口的位置及红绿灯信号起止时刻等要素,构建更为完善的电车运行图。
如图 3 所示,A 站与 B 站分别用横线表示,交叉口信号控制点则用方块表示,矩形方块左侧为相应信号开始时间,右侧对应结束时间,黑色矩形方块对应红灯信号,灰色矩形方块表示绿灯信号。
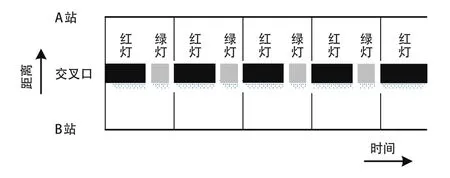
图3 交叉口运行图表示方法
基于半独立路权形式与信号被动优先控制策略,在各交叉口给定信号周期和绿信比的条件下,通过优化各路口的绿灯信号绝对相位差,使得有轨电车总旅行时间最短,构建出有轨电车运行时刻表与交叉口信号配时的整数优化模型。
在模型假设中,为使电车有规律地到达交叉口,模型中各交叉口信号周期为整数倍关系,且发车间隔为信号周期的整数倍,上下行有轨电车相位为同一相位。
符号定义及说明见表 1。
模型的目标是所有列车的总旅行时间最小,目标函数F为:

式(3)中,fi为列车i的始发站,li为列车i的终点站。
约束条件包括以下 3 个方面。
(1)到发与停站时间约束
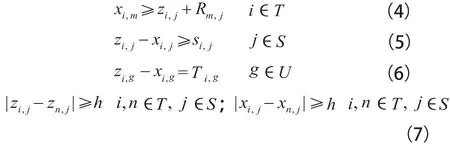
式(4)~(7)中:m为车站j之后的车站;Rm,j为车站m到达车站j的最小运行时间;n为与列车i经过相同车站的列车;zi,j为列车i在车站j的出发时刻;xi,j为列车i在车站j的到达时刻;zi,g为列车i在交叉口g的出发时刻;xi,g为列车i在交叉口g的到达时刻。式(4)表示车站m到达车站j的运行时间约束,式(5)表示电车停站时间约束,式(6)表示电车在交叉口通过时间约束,式(7)表示列车到发的安全间隔时间约束,即相邻列车到发的间隔时间必须大于等于安全间隔时间。
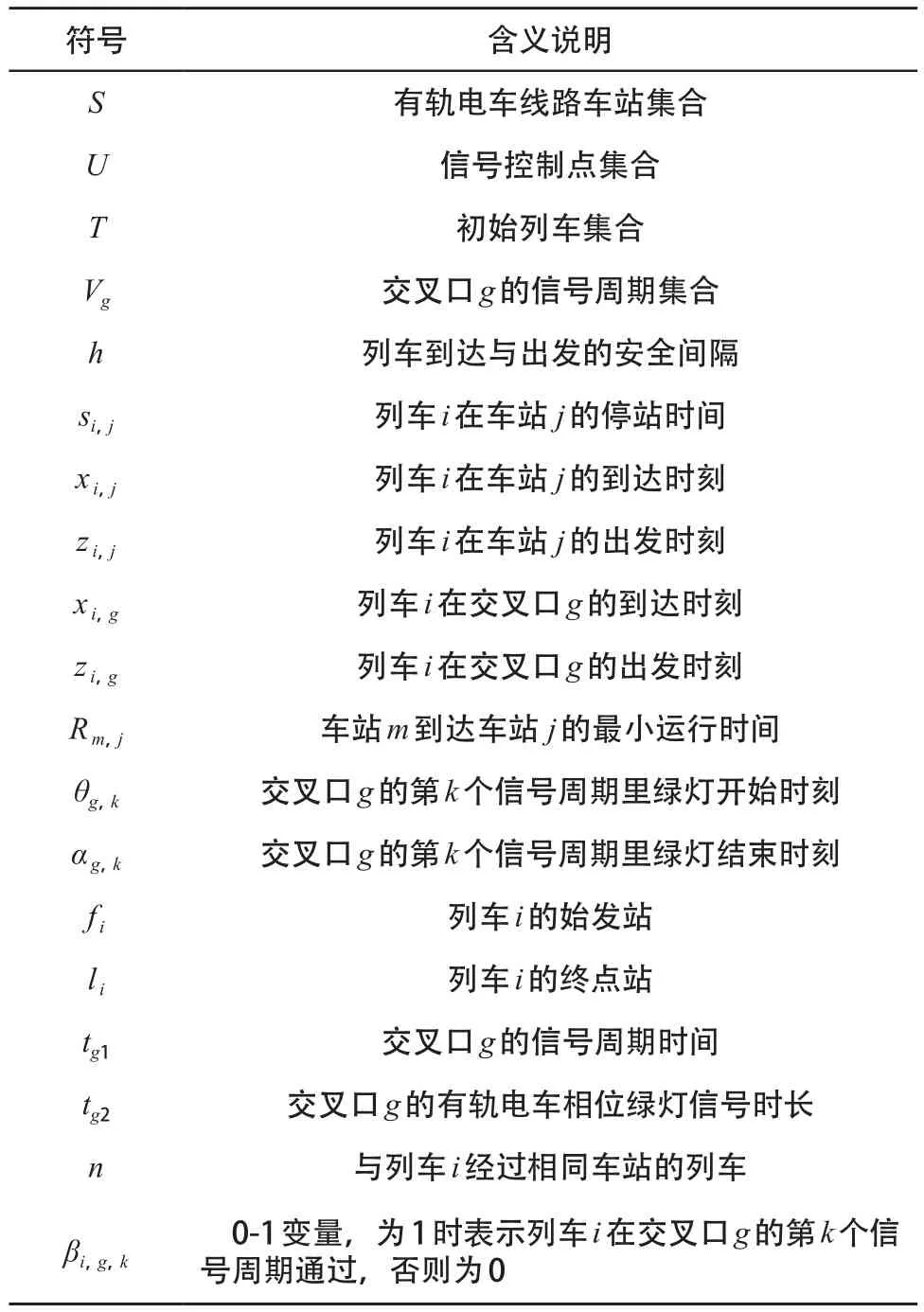
表1 符号说明
(2)交叉口信号时间约束
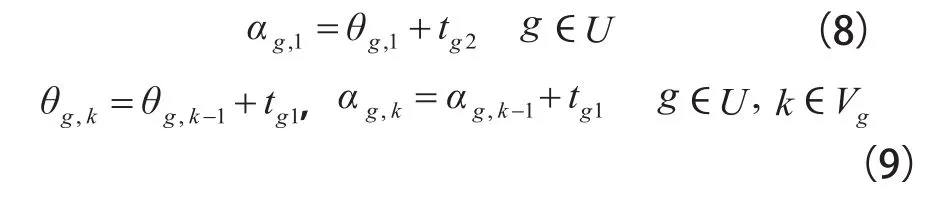
式(8)表示信号控制点的信号周期与绿灯时长的关系,式(9)表示绿灯开始及结束时刻的递推关系。式(8)、(9)中:θg,k为交叉口g的第k个信号周期里绿灯开始时刻;αg,k为交叉口g的第k个信号周期里绿灯结束时刻;tg1表示交叉口g的信号周期时间;tg2表示交叉口g的绿灯信号时长。
(3)交叉口信号控制约束。为表示交叉口信号对有轨电车的约束,引入 0-1 变量,βi,g,k值为 1 时表示有轨电车i在交叉口g的第k个信号周期通过,否则为 0,约束如下:
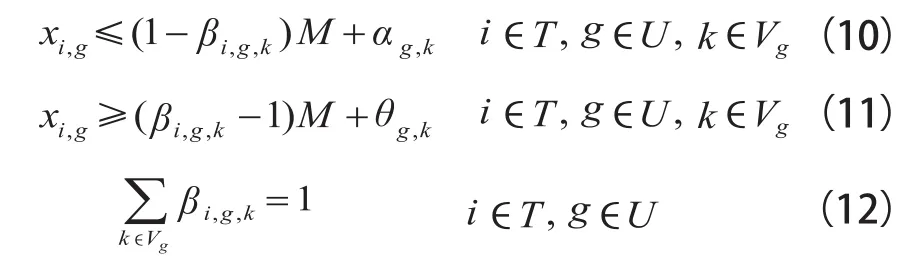
式(10)~(12)中,M为一足够大的正整数。式(10)、(11)表示有轨电车i在交叉口g的第k个信号周期通过需在交叉口的绿灯信号范围内,式(12)表示列车必须且只能选择某一个绿灯周期通过。
运行图反馈优化编制方法相比于直接计算法在理论上更为精确,但当发车间隔不是信号周期整数倍时,模型便不再适用,此时,需用直接计算法进行估计。因此,区间通过能力的理论计算需要 2 种方法的相互结合。
3 仿真技术
微观交通仿真软件 VISSIM 可以将有轨电车在实际运行中通过交叉口、停站、终端折返等过程中的随机性和动态性因素考虑在内,真实再现线路运营实况。因此,为了衡量理论计算的精确性,验证其可操作性,需利用 VISSIM 建立 1 套有轨电车通过能力仿真系统作为理论体系的支撑。
3.1 仿真研究目标
针对半独立路权模式、交叉口固定配时控制方案下的有轨电车线路,通过在仿真系统中设定交通流的仿真参数,建立有轨电车路网模型,进行相关参数设置,在一定的运行规则条件下,对有轨电车在城市道路中的运行过程进行仿真,并设置检测器以检测固定时间内电车通过数量,最终得到实际线路通过能力,对理论计算结果加以验证。
3.2 仿真系统构建
针对具体的有轨电车线路,仿真系统构建流程如图4 所示。
3.2.1 关键基础数据
建立仿真系统所需要的关键基础数据包含 3 类,即几何数据、运营数据、电车运行数据(表 2)。
3.2.2 仿真路网建立
通过 AutoCAD 制图或其他方式获取有轨电车线路底图,以此为基础使用路段和连接器 2 个基本组件绘制路网。根据实测基础数据,重点单独铺设电车运行线路,修改路段属性中的车道数、行为类型等,完成路网搭建。
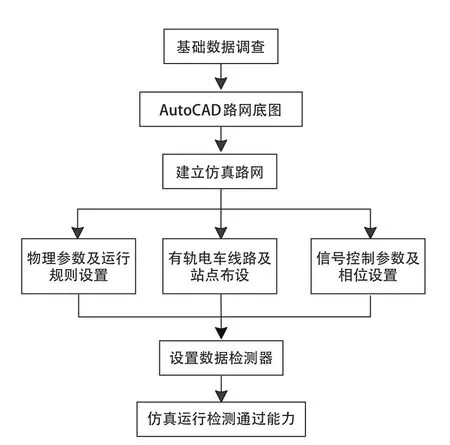
图4 仿真流程图
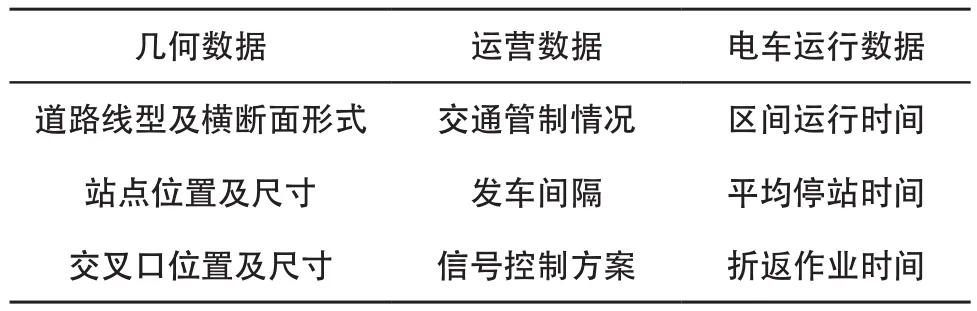
表2 关键基础数据
3.2.3 参数标定
为了建立更符合实际运行情况的有轨电车仿真模型,需要进行相关参数的设置,这主要体现为电车编组模块、期望车速、加减速以及车站停靠时间等参数的标定。
(1)有轨电车模型设置。即使采用相同运行参数,不同长度的有轨电车在经过交叉口或车站时,也会对通过能力计算结果产生影响。因此,在车辆模型分布中,应定义统一的、与实际数据相同的电车 3D 模型。
(2)期望车速设置。有轨电车期望速度对其在运营时段内的通过能力有很大影响,通过调整期望车速分布曲线使得仿真的电车车速和实际车速趋同,最大限度重现实际运行情况。
(3)加减速函数设置。有轨电车进站、停站上下客、离站以及通过交叉口或未遇到红灯相位而停止等现象存在加减速。因此,在仿真中需对其加减速情况和加减速度的大小进行准确标定。
(4)停车时间分布设置。有轨电车停站上下客时间是影响其通过能力的一项重要因素,根据有轨电车停车等待上下客情况可定义其在站点的停车时间分布,包括由平均值和标准差定义的正态分布,和通过极值以及任意数量中间点创建不同形状图表的方法定义的停车时间分布。
3.2.4 优先规则设置
有轨电车有路中式和路侧式 2 种线路布设方式,但由于地理条件等原因,有轨电车会采取多种布设模式相结合的方式。在布设形式改变的过程中,有轨电车轨道铺设可能会占用一定区域的人行道或非机动车道。实际线路中,有轨电车在该区域通行时,采取优先通行信号控制策略,既保证行人和非机动车辆通行安全,同时也不会对有轨电车的通行造成影响。因此,仿真中需要在让行的路段设置电车优先通行规则,更好地还原实际运行情况,保证其通行能力检测结果的精确性。
3.2.5 有轨电车线路、站点布设及运行参数选择
有轨电车在专用道上行驶,需要铺设专用线路。此外,车站数目、位置、类型以及有轨电车长度会对其通过能力产生较大影响,所以,站点也应按实际情况精确布设。
(1)有轨电车站点。根据实测数据,首先确定车站类型,可以为设置在选定路段的车道上的路边站点,也可为设置在紧邻慢车道的 1 条特定路段上的港湾式站点;其次,要在路网上明确站点位置以及有轨电车车站类型及长度,以对有轨电车站点进行精确布设。
(2)有轨电车路线及运行参数选择。有轨电车线路利用 VISSIM 中的公交线路进行铺设,选择相应的有轨电车车型及对应的期望车速;设置发车间隔等运行参数;此外,车辆的停车时间由已设置好的停车分布决定。
3.2.6 检测器及信号配时方案设置
着重研究有轨电车高峰运营时段通过能力,主要运用数据检测器检测规定时间内有轨电车通过量。此外,根据实际基础数据设定信号配时,进行 3D 信号灯设置,至此,完成仿真系统模型的建立。
4 案例分析
根据建立的理论体系,以苏州有轨电车1号线为例,收集线路基础数据,计算理论通过能力,而后对该线路实际运营进行 VISSIM 仿真,验证理论计算结果的可靠性和合理性。
苏州有轨电车 1 号线全线总长 18 km,包含 10 个车站和 14 个交叉口,线路示意图如图 5 所示。
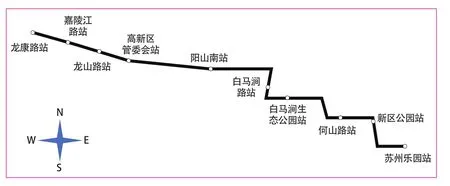
图5 苏州有轨电车1号线线路示意图
苏州有轨电车 1 号线采用人工驾驶的半独立路权模式,线路布设形式为路中式—路侧式—路中式,车站形式有岛式和侧式 2 种,停站时间为 30 s,终端折返站为站后折返形式,折返时间为 90 s,交叉口均采用被动优先控制下的固定配时方案,信号周期均为 120 s,有轨电车相位时长 27 s。电车平均运营速度 45 km/h,交叉口通过速度 30 km/h,转弯及道岔通过速度 15 km/h。
4.1 理论计算
4.1.1 基于直接计算法的通过能力计算
基于给定的有轨电车开行方案(发车间隔为240 s)和线路交叉口信号配时,利用所建立的理论体系,计算得到:交叉口通过能力为 32 列/h,车站通过能力为 66 列/h,折返能力为 40 列/h,区间通过能力为 13 列/h。
4.1.2 基于运行图优化的通过能力计算
根据建立的运行图模型,结合 Lingo 编程规则,设计出的算法流程图如图 6 所示。
算法整体思路为:在定义集合与输入相关参数,满足各种约束以达到列车总旅行时间最小的基础上,不断增大列车开行对数,直到无可行解为止。
结合上述算法,利用 Lingo 软件进行编程,求解得到区间通过能力为 15 列/h。
根据求解得到的有轨电车时刻表与交叉口信号配时优化方案,绘制出有轨电车运行图(图 7),直观地观测出信号被动优先控制策略下有轨电车的区间通过能力。

图6 算法流程图

图7 有轨电车运行图
4.2 实例仿真
为了验证现代有轨电车理论计算的准确性,借助VISSIM 仿真平台对苏州有轨电车 1 号线进行实况仿真,将理论研究与仿真系统得到的通过能力对比分析。
4.2.1 AutoCAD 线路底图绘制、导入及路网的建立
根据线路几何数据绘制苏州有轨电车 1 号线全线线路底图,并导入 VISSIM 中,以此为依据构建有轨电车路网模型。
4.2.2 参数标定及运行规则设置
根据苏州有轨电车 1 号线关键数据,分别对有轨电车的几何尺寸、期望车速、停站时间等参数进行设定。针对有轨电车运行情况,在相应区域进行冲突区域以及运行规则的设置。
4.2.3 运行参数设置
(1)有轨电车专用线及站点设置。首先对有轨电车全线所有站点进行设置,其中站台形式均选用侧式站台,平均停站时间采用正态停车时间分布,均为 30 s。然后对上下行全线进行专用线路设置,其中,为充分体现线路通过能力,发车间隔采用最小值 240 s。
(2)信号配时方案设置。各个交叉口的信号配时方案均采用实际线路的固定信号配时。
4.2.4 实况仿真及数据检测
在运行线路上下行分别设置 8 处数据检测器,在固定仿真时段 3 600 s 内进行仿真,检测通过的电车数量,取检测结果的平均值作为实际线路通过能力。结果显示,基于给定的电车开行方案(发车间隔为 240 s)和线路交叉口实际信号配时,通过仿真得出有轨电车高峰时线路通过能力为 15 列/h。其 3D 仿真界面如图 8 所示。

图8 苏州有轨电车1号线 3D 仿真界面
4.3 对比分析
4.3.1 结果评价
综上所述,利用理论计算和仿真技术,得到苏州有轨电车 1 号线的通过能力如图 9 所示。
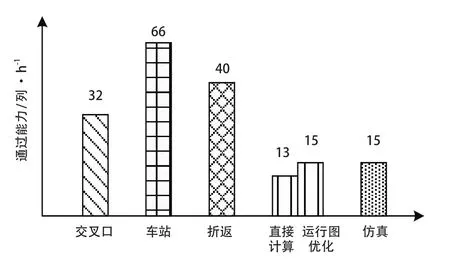
图9 有轨电车通过能力计算结果
由图 9 可知,理论计算所得到的通过能力为 min{交叉口,车站,折返,区间} = 15 列/h,仿真技术所得到的通过能力也为 15 列/h,说明理论计算较为精确。理论计算与仿真技术的结合对有轨电车通过能力进行了更为准确的估计,此外,也发现该开行方案下行车区间为整条线路通过能力的瓶颈。
4.3.2 多次验证
由于发车间隔是决定区间通过能力的一个重要因素,开行方案的不同可能会使线路通过能力发生改变。基于此,多次调整发车间隔,分别在发车间隔为 90 s、120 s、180 s、240 s、300 s、360 s、400 s 和 480 s 情况下,利用理论计算相应开行方案下的通过能力并与仿真结果对比,结果如表 3 所示,再次验证了理论计算的准确性和合理性。
由表 3 可知,90 s 发车间隔时线路瓶颈可能为交叉口;120 s 发车间隔时线路瓶颈可能为交叉口和行车区间;发车间隔大于或等于 180 s 时线路瓶颈可能为行车区间。由此说明,当开行方案不同时,影响通过能力的瓶颈因素会相应发生改变。
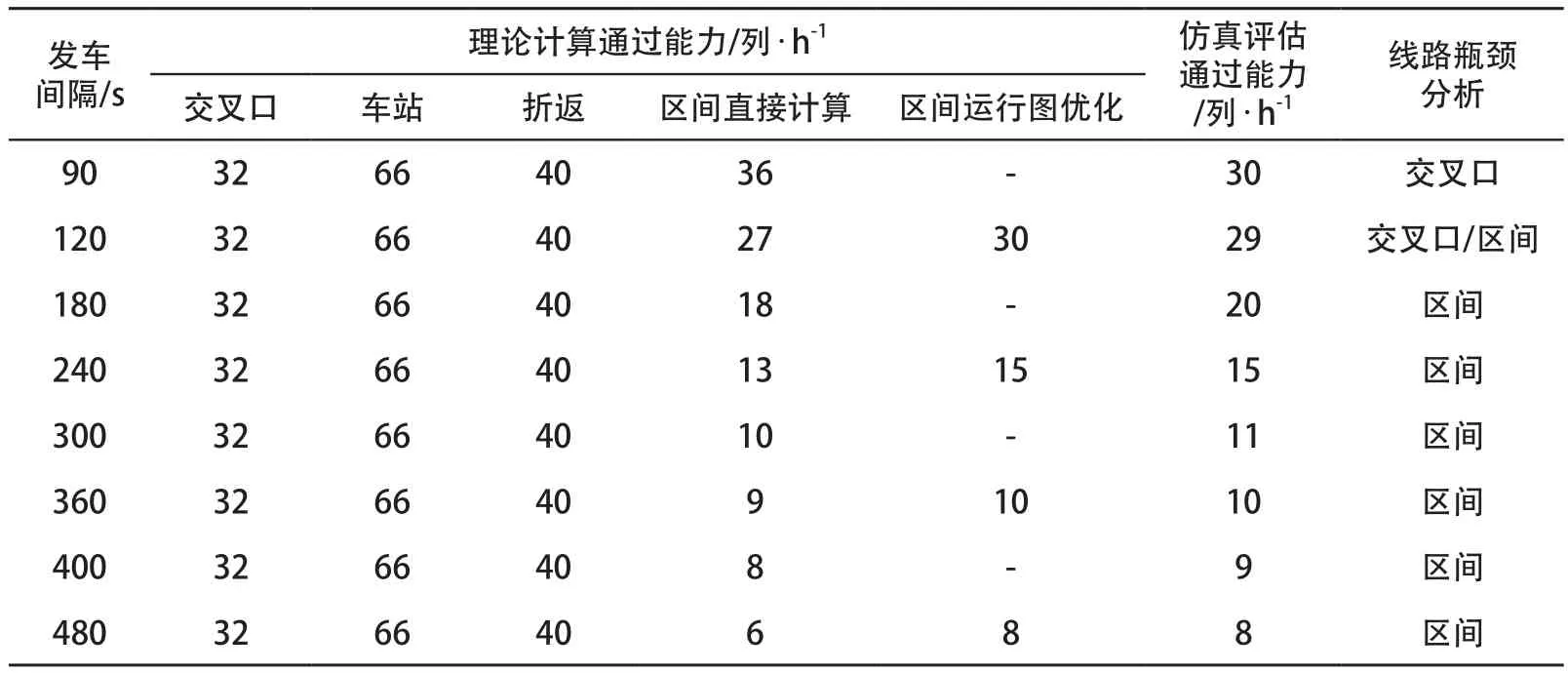
表3 不同发车间隔下理论计算与仿真评估通过能力对比及瓶颈分析
5 结语
本研究以半独立路权模式下的现代有轨电车为对象,从理论计算和仿真技术两方面对有轨电车通过能力进行了全面深入的研究。首先构建理论体系,并以苏州有轨电车1号线为例进行计算,随后建立仿真系统对该条线路进行实况仿真,检测结果与理论计算结果相吻合,验证了理论计算的准确性。文章的研究成果可为现代有轨电车的运营组织提供决策支持。
本研究只针对单一线路进行了研究,但随着现代有轨电车线路复杂程度的提高,对于具有支线的线路或者成网条件下的多条线路通过能力计算,以及对于采用共线或跨线运营模式的线网通过能力计算将是接下来研究的重点与难点。
[1] 丁强. 现代有轨电车交通概述[J]. 都市快轨交通,2013,26(6):107-111.
[2] 彭丰. 半独立路权条件下有轨电车交叉口信号控制仿真优化研究[D]. 北京:北京交通大学,2015.
[3] 李凯,毛励良,张会,等. 现代有轨电车交叉口信号配时方案研究[J]. 都市快轨交通,2013,26(2):104-107.
[4] 刘新平. 新型有轨电车信号系统方案研究[J]. 城市轨道交通研究,2012(5):50-52,60.
[5] 刘立龙,李建成. 基于VISSIM的现代有轨电车交叉口信号优先控制策略研究[J]. 公路与汽运,2014(6):56-58.
[6] 袁江波. 现代有轨电车路口信号优先控制的方案及比选[J]. 城市轨道交通研究,2016(3):51-55.
[7] 吴胜权,王贵国,王艳荣,等. 基于VISSIM仿真系统的有轨电车线路对城市道路交叉口影响评价方法研究[J]. 中国铁路,2014(5):51-55.
[8] 高继宇. 现代有轨电车行车组织设计相关问题分析[J]. 科技信息,2011(32):653-654.
[9] 吴胜权,黄振晖,曹源. 有轨电车路权配置与信号系统选择[J]. 中国铁路,2014(8):97-99.
[10] 张代胜,王坚强,陈荣武. 现代有轨电车运行图编制策略探讨[J]. 铁道通信信号,2016,52(10):39-41.
[11] 张晓倩. 现代有轨电车运行图及车底周转图的研究与开发[D]. 甘肃兰州:兰州交通大学,2015.
[12] 李玉斌. 现代有轨电车运行图调整研究与开发[D]. 甘肃兰州:兰州交通大学,2015.
[13] 江志彬,徐瑞华. 信号被动优先条件下的有轨电车运行图编制优化[J]. 交通运输工程学报,2016,16(3):100-107.
[14] 宋嘉雯. 有轨电车运营模式与运输能力研究[J]. 都市快轨交通,2014,27(2):108-112.
[15] 张海军,胡军红,杨敏,等. 现代有轨电车最小发车间隔及相关指标研究[J]. 南京工业大学学报:自然科学版,2016,38(3):107-113.
[16] 董皓,刘畅,齐健,等. 现代有轨电车折返能力分析与计算[J]. 道路交通与安全,2016,16(3):17-22.
[17] 李江. 交通工程学[M]. 北京:人民交通出版社,2002.
[18] 彭其渊,王慈光. 铁路行车组织[M]. 2版. 北京:中国铁道出版社,2015.
猜你喜欢
教学月刊(小学版)(2021年26期)2021-09-30
汽车与安全(2018年8期)2018-10-26
铁道通信信号(2018年7期)2018-08-29
铁道运输与经济(2018年7期)2018-08-03
铁道运输与经济(2018年3期)2018-03-20
铁道运输与经济(2018年2期)2018-03-02
中国公路(2017年19期)2018-01-23
中国自行车(2017年1期)2017-04-16
中国石油石化(2016年12期)2017-01-17
铁道通信信号(2016年10期)2016-06-01
