基于观测分解的一类非线性滤波方法
2018-02-03 09:43宋义轩冯肖亮
科技创新与应用 2018年5期
宋义轩+冯肖亮
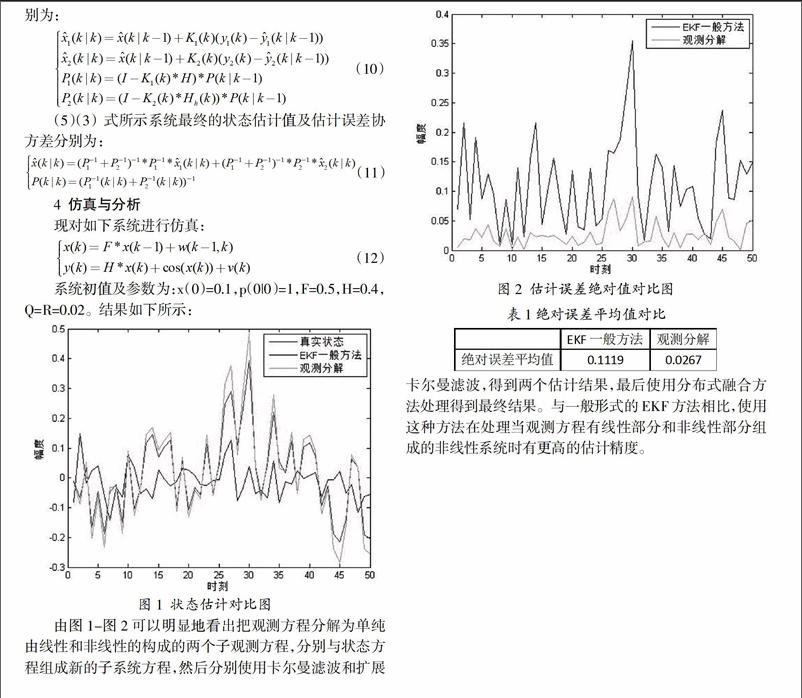

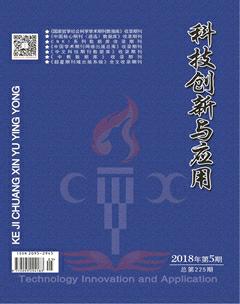
摘 要:文章针对一类观测方程为非线性,状态方程为线性的非线性系统开展滤波方法研究。首先,采用观测分解方法把原系统拆分为线性系统部分和非线性系统部分;然后,分别利用卡尔曼滤波和扩展卡尔曼滤波对新系统进行处理,最后采用分布式融合方法进行估计融合。通过数值仿真将其与直接使用扩展卡尔曼滤波的处理结果进行对比,使用观测分解的新方法有更好的估计精度。
关键词:非线性观测;观测分解;分布式融合
中图分类号:O212 文献标志码:A 文章编号:2095-2945(2018)05-0091-02
Abstract: In this paper, the filtering method for a class of nonlinear systems with nonlinear observation equations and linear state equations is studied. Firstly, the original system is divided into linear system and nonlinear system by the method of observational decomposition. Then, Kalman filtering and extended Kalman filtering are used to process the new system, and the distributed fusion method is used to estimate the fusion. Compared with the results of direct use of extended Kalman filtering, the new method of observation decomposition has better estimation accuracy.
Keywords: nonlinear observation; observation decomposition; distributed fusion
1 概述
隨着人们对卡尔曼滤波理论的深入研究,使其在许多领域中得到了广泛应用[1]。但卡尔曼滤波是线性系统中最优估计理论,而在实际应用的时候系统大多数为非线性系统,为了使用卡位曼滤波理论,首先要对非线性系统进行线性化处理,然后再采用卡尔曼滤波,这种处理非线性系统的方法被称为扩展卡尔曼滤波(EKF)[2]-[4]。但是针对当一类只有观测方程为非线性,状态方程为线性的系统时,一般还是直接对观测方程进行处理,忽略了观测方程中线性部分对在观测方程进行线性化处理时的影响,本文在考虑该影响的基础上,提出一种基于观测分解的一类非线性滤波方法。
参考文献:
[1]Friedland B.Treatment of bias in recursive filtering[J]. IEEE Transactions on Automatic Control, 1969,14(4):359-367.
[2]S.J.Juliet, J.K.Uhlmann. A New Approach for filtering Nonlinear Systems[J].In The Proceedings of the American Control Conference,
Seattle,Washing ton, 1995,1628 -1632.
[3]张宏欣,周穗华,冯士民.渐进扩展卡尔曼滤波器[J].电子学报,2017,45(01):213-219.
[4]王龙,章政,王立.改进扩展卡尔曼滤波的四旋翼姿态估计算法[J].计算机应用,2017,37(04):1122-1128.endprint