基于双目视觉技术的车轮接触面损伤检测方法
2018-02-25 02:39胡广胜王菁董绪琪尚军营
电子技术与软件工程 2018年7期
关键词:检测
胡广胜 王菁 董绪琪 尚军营
摘要 伴随着我国高铁铁路的迅猛发展以及高速列车车速的不断提升,高速列车的行车安全问题也广泛受到关注。其中车轮踏面对高速列车行进中的安全问题以及高速列车车速的提升都有关键影响,目前使用最广泛的人工观察安全检测容易出现观察不到位、漏检以及耗时严重等问题,已经不能满足目前我国高速列车迅速发展的现状。而伴随着高速铁路的迅速发展,计算机人工视觉领域近年来也有较大突破与进展,其中双目视觉系统也被广泛应用于不同条件下的人工视觉系统中。利用双侧成像方法对车轮踏面进行拍摄,根据拍摄图像以及双目视觉系统,重新构建车轮踏面的三维立体信息,由此判断踏面擦伤故障,且较之人工检测可以全方位的对车轮踏面进行检测并且大幅度提升检测效率。
【关键词】双目视觉系统 车轮踏面擦伤 检测
1 引言
至2016年末我国高铁运营里程己达2 2万公里,较08年翻了近32倍,预计2020年达到3 8万公里的运营里程。在高速铁路迅速发展的同时,高速列车的安全检测也成为重中之重,传统的高速列车检测方法为人工检测,通过肉眼对每辆进站列车或者新造列车进行观测,判断其是否存在故障或者安全隐患。这种检测方式存在着许多弊端:
(1)由于列车的结构原因,许多部位人眼无法直接观测到,导致列车许多部位无法检测;
(2)通过人眼观测的方式长时间作业,容易造成疲劳作业,对观测结果精度产生影响,出现故障漏报的可能;
(3)这种传统的检测方式极为耗时,大幅度降低作业效率,提升人工成本。为避免传统检测方式的种种弊端,我们引入计算机视觉系统进行高速列车的安全检测。
随着计算机视觉和人工智能的发展,应运而生许多可用于实际生活生产的理论系统,其中双目视觉系统就是模仿人眼成像并利用计算机相关知识而产生的一套可以让计算机通过成对的二维图像信息来认知三维环境信息的系统,计算机通过双目视觉系统获得了感知三维环境中物体集合信息(如形状、位置、运动姿态等),以及进一步对它们进行描述、存储以及识别的能力。通过这种能力,我们可以利用计算机对车轮踏面进行图像采集,并对采集后的图像进行分析与计算,从而建立出车轮踏面的三维信息环境,根据踏面的三维信息中的高度信息来判断踏面是否有擦伤故障,并在终端屏幕显示故障图像、故障信息以及存储检测报文,有检测人员在终端进行故障研判。通过该系统可以大幅度提升检测人员的作业效率以及故障精度的提升。
2 车轮踏面擦伤故障
目前我国高速铁路主要运行车辆为动车组,动车组的主要构成部分有:车体、转向架、车辆连接装置、制动装置、车辆内部设备、牵引传动系统、辅助供电系统。
其中转向架为支撑车体并使之在轨道上运行的装置,也称为行走部分。转向架的主要组成为:
(1)轮对轴箱装置(轴箱与轴承装置是联系构架和轮对的活动关节);
(2)弹性悬挂装置(转向架在轮对与构架之间和构架与车体之间,设置悬挂装置);
(3)构架(转向架的基础,把转向架各零部件组成一个整体);
(4)轴箱定位装置(约束轮对与构架之间的相对运动机构);
(5)牵引装置(车体与转向架的连接装置):
(6)回转阻尼装置(抑制高速转向架蛇形运动);
(7)抗侧滚装置(抗侧滚扭杆);
(8)制动装置(复合制动,即电制动+空气制动)。
轮对为转向架中重要的部件之一,又是影响车辆运行安全的关键部件之一。轮对主要有车轮、车轴、制动盘、齿轮箱等组成。动车组车轮通常采用整体车轮,它包括踏面、轮缘、副板等部分。车轮与钢轨的接触面称为踏面。由于车轮在轨面上滑行,而把圆锥形踏面磨成一块或数块平面的现象叫做踏面擦伤。造成踏面擦伤的原因有:
(1)车轮材质过软;
(2)制动力过大;
(3)制动缓解不良;
(4)调车溜放时单方面使用铁鞋;
(5)同一轮对两轮直径相差过大。
车辆经过长期运行后会产生踏面擦伤故障,列车在踏面擦伤的情况下运行会引起车辆振动过大、加速车辆震动过大以及破坏钢轨的现象。从而对车辆的行车安全造成隐患,且被破坏的钢轨可能对其他行进车辆造成安全隐患。所以对踏面的安全检测极为重要。由于踏面本身的构成结构,其与车体之间空隙仅为18mm,
很难通过肉眼对踏面的全部部分进行观察,所以采用双目视觉系统结合外部硬件技术对踏面进行计算机检测。
3 双目视觉故障检测系统
3.1 双目视觉系统概论及数学原理
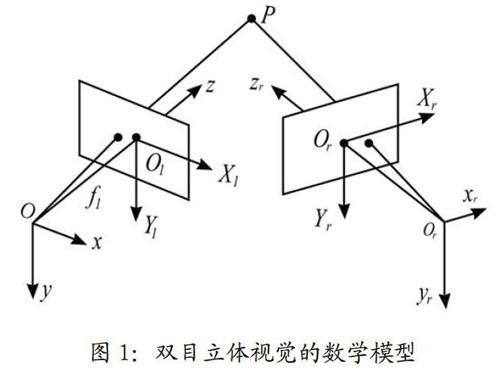
双目视觉又称双目立体视觉,是基于视差原理,用同一被测物体的多幅图像来获取物体的三维几何信息的方法。在机器视觉系统中,双目视觉一般由双摄像机从不同角度同时获取被测物体的两幅数字图像,或者由单摄像机在不同時刻从不同角度获取被测物体的两幅数字图像,然后基于视差原理即可恢复出被测物体的三维几何信息,重建被测物体的三维形状与位置。从目前机器视觉理论的发展情况来看,双目立体视觉在机器视觉研究中发挥着越来越重要的作用。
双目立体视觉是基于视差原理测量被测物体的景深信息,由三角法原理进行三维信息的获取,即由两个摄像机的图像平面和被测物体平面三者构成一个三角形。己知两个摄像机之间的位置关系,便可以获得两摄像机公共视场内物体的三维尺寸及空间物体特征点的三维坐标。
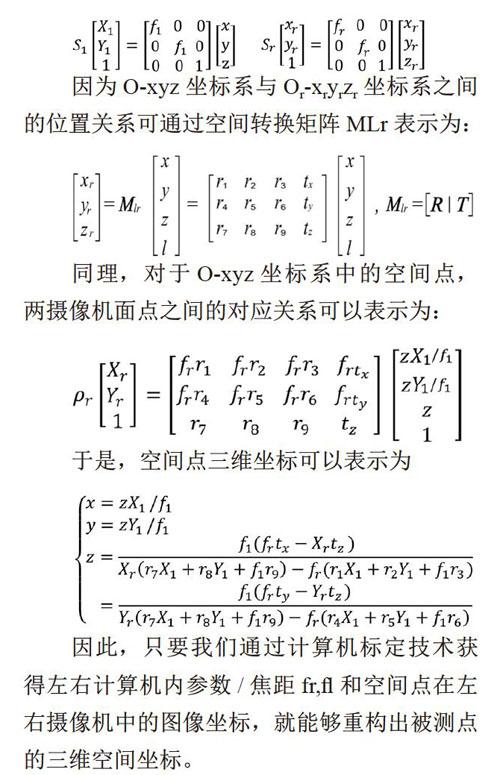
因此,只要我们通过计算机标定技术获得左右计算机内参数/焦距fr,fi和空间点在左右摄像机中的图像坐标,就能够重构出被测点的三维空间坐标。
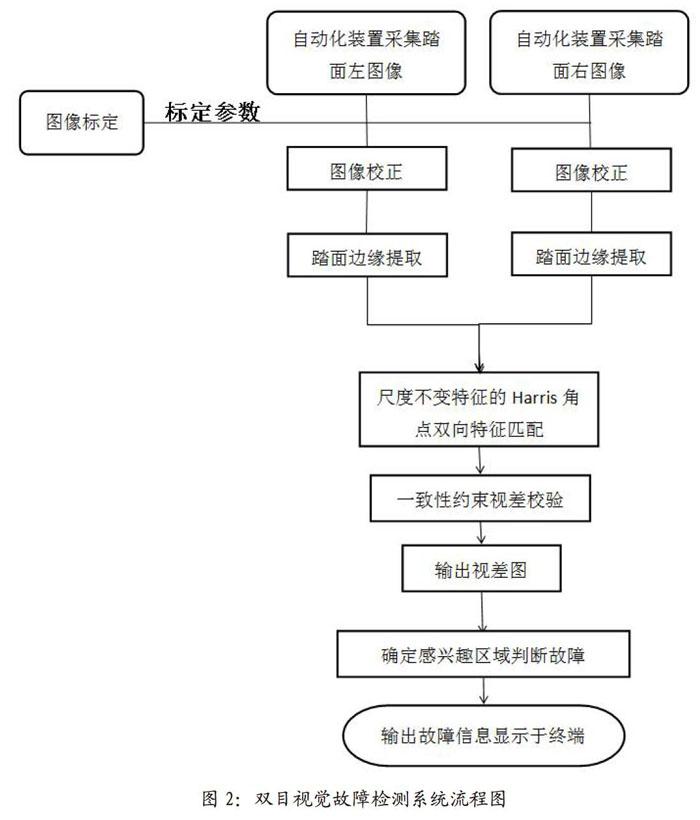
3.2 双目视觉故障检测系统流程
双目视觉系统先根据张定友标定法进行相机内参标定,再由硬件设备采集成对的踏面图像,并对图像进行校正、边缘提取、特征匹配取得踏面视差图(包含踏面三维环境信息)。在视差图像上对踏面特征进行检测,识别是否存在擦伤故障,并向终端输出故障信息,如图2所示。具体步骤为:
(1)图像获取,有两组摄像机分别对踏面进行同时拍摄,从而获取踏面的图像对;
(2)根据获取的成对的踏面图像经过双目视觉系统预处理生成踏面的视差图像;
(3)在视差图像上确定感兴趣区域,其中感兴趣的区域为车轮损伤的区域;
(4)二值化处理,将视差图像的感兴趣区域和非感兴趣区域进行二值化处理,形成灰度值为O或255的分布图效果,得到二值化图像;
(5)实时判断,系统根据得到的二值化图像的形态学特征、擦伤的大小特征、边缘特征,从每张踏面图像中分析存在的擦伤;如系统认定存在隐患,进行报警,及时通知工作人员。
3.3 踏面擦伤故障识别
下面通过踏面擦伤故障实例,来详细说明其标定、定位、和故障识别算法。
首先通过硬件设备拍摄标定相機内参用的棋盘格图片。拍摄后的成对图像如图3所示。
通过张正友标定法分别对左右摄像机进行标定计算左右摄像机内参,计算结果如图4所示。
根据两侧摄像机的标定结果(摄像机内参)对含有踏面擦伤故障进行检测,确定故障区域。
图5为自动化硬件双目摄像头装置拍摄到的踏面擦伤故障图片,首先对图片做预处理,使图片内容简化突出。图6为对原图像进行预处理后的图像。然后定位图中的踏面大致区域,利用双目视觉系统算法以及张正友标定法计算得到的双侧摄像机内参数对图片进行识别。计算出踏面平面上的距离差值,找出同一平面中高度略低于周边的部位,根据其形状和深度判定为踏面擦伤故障。
如图7所示,经过对原图像进行预处理后,图像上的噪声减少并突出了图像中的踏面擦痕,经过双目视觉系统计算后,可以得出图像中每个像素点的高度信心,通过对高度信息的对比,找出该平面中不处于同一平面的高度位置,并计算其形状与面积大小后最终确定踏面擦伤的位置与大小。
4 结论
在某些应用场景,机器视觉比人类的生理视觉更具优势,它更加准确、客观和稳定。在有了成熟的图像识别技术之后,加以人工智能的支持,计算机就可以自行对获得的图像、视频信息进行分析和判断,发现异常情况直接报警,带来了更高的效率和准确度。本文利用硬件设备拍摄照片并利用双目视觉系统对图片中的踏面擦伤故障进行识别检测,相比于传统的故障检测方法,其优点有:第一,大幅度提升工作效率与准确率。第二,故障识别也增加了更多的图像处理手段,增加算法的灵活性。因此,本文采用的基于双目视觉技术的车轮踏面擦伤检测故障识别方法,具有更强的适应性、灵活性、可靠性。帮助我们更好的完成更多的任务。
参考文献
[1]胡广胜,贤业飞,孙福庆,李艳,基于彩色图像处理的高速列车快速检测方法(中车青岛四方机车车辆股份有限公司,山东青岛266111).
[2]智研咨询发布的《2017-2022年中国高速铁路建设市场深度监测及未来前景预测报告》
[3]柴雪松,杨凤奎,罗林.轨道视频检查系统[J].中国铁路,2001(06): 59-60.
[4]白明,庄严,王伟.双目立体匹配算法的研究与进展[c].控制与决策,2008,23(07).
[5]顾超,基于目标轮廓特征的识别及列车转向架故障检测[D].苏州:苏州大学,2014,17 (25).
猜你喜欢
中国设备工程(2022年12期)2022-07-11
中学生数理化·七年级数学人教版(2021年6期)2021-11-22
中学生数理化·七年级数学人教版(2021年6期)2021-11-22
中学生数理化·七年级数学人教版(2021年6期)2021-11-22
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
中学生数理化·七年级数学人教版(2019年9期)2019-11-25
中学生数理化·七年级数学人教版(2019年9期)2019-11-25
中学生数理化·七年级数学人教版(2019年12期)2019-05-21
中学生数理化·七年级数学人教版(2019年12期)2019-05-21