基于单目视觉的飞机着舰参数测量方法
2018-02-25 02:39陈兆飞李强雷彪张琪马翰飞郭炳
电子技术与软件工程 2018年7期
关键词:特征提取
陈兆飞 李强 雷彪 张琪 马翰飞 郭炳

摘要 视觉测量技术是基于计算机视觉理论发展起来的一种新的测量技术。本文首先对固定场景下摄像机高精度测量技术进行了深入的分析,然后给出了目标上已知位置的合作标识点的提取和跟踪方法,最后利用即有的监控摄像机实现了基于单目视觉的飞机着舰位置、姿态和轨迹的数据获取,通过飞行试验验证,该测量方法及数据精度满足实际应用要求。
【关键词】视觉测量 飞机着舰 合作目标 特征提取 轨迹测量 位姿测量
1 概述
空间运动目标的运动参数是反映其飞行状态的重要数据。空间运动目标的三维姿态参数的测量对武器试验鉴定、交会对接、卫星编队飞行、飞行器试验测量、事故分析、工业设计等意义重大。在很长的时间内,对运动目标的位置姿态和轨迹测量并没有引起人们太多的重视,但随着人们对运动物体研究的深入,对运动目标的位置姿态和轨迹测量逐渐成为人们研究的热点问题。运动目标的位置、姿态及轨迹的测量对于我们分析运动目标的性能具有很重要的意义。
飞机目标数据测量有多种方法,包括无线电遥测、激光测量、光电经纬仪、高速摄像机等,其中基于可见光的图像测量方法在近几年得到了长足发展。双目摄像测量方法因其测量精度高、实时性好,在很多场景中得到广泛的应用,但在不少特殊场景中,限于摄像机的安装位置、数量和复杂性的要求或利用既有的单一监视设备,需要采用单目视觉测量完成对运动目标的特定阶段的飞行参数和运动轨迹的测量,且测量精度仅受限于目标的成像分辨率,性价比高,具有较好的应用前景。
本文的研究内容正是在固定场景下,使用既有的监视设备,利用机身原有的合作特征点,通过单目摄像测量算法,完成高速、近距离飞机着舰过程中飞行参数的定量获取,进而构建了一套完整的测量系统。本课题的研究成果已经应用于某飞机着舰参数测量系统中,具有较好的实际应用价值。
2 系统组成及原理
2.1 系统组成
基于单目视觉的飞机着舰参数测量系统能够完成飞机着舰末段,在着舰点附近的的飞行参数测量。限于摄像机的安装位置、数量和复杂性的要求,考虑到测量物距变化范围不大,单台固定焦距的摄像机可以满足视场、景深等需要。
本系统能够利用即有的监控摄像机实现飞机着舰位置、姿态和运行轨迹的测量。使用飞机跑道一侧现有的一台摄像机,通过选取若干控制点,对摄像机的内外参数进行标定。飛机着舰前摄像机伺服转台固定不动,同时焦距不变,调整其视场和焦距覆盖整个飞机着舰区域,使飞机在整个着舰引导过程中都处在该摄像机的视场中。
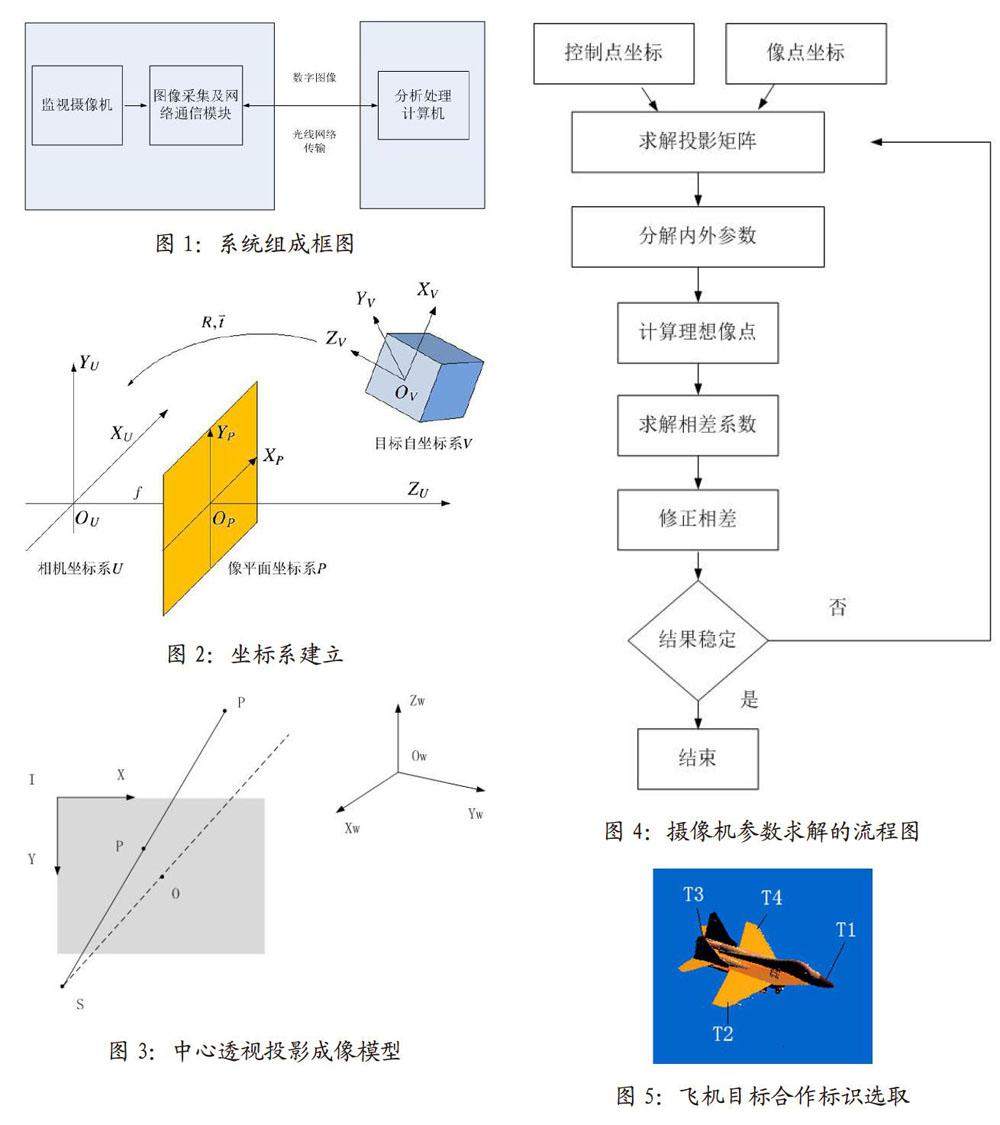
在飞机着舰过程中,摄像机对飞机的着舰过程进行记录,通过提取飞机图像上机身上的的特征点,经过本系统处理之后,即可得到飞机坐标系与着舰坐标系的位置关系,也就得到了需要测量的数据,这样就完成了对飞机着舰参数的测量。系统组成框图如图1所示。
在本系统中,用于着舰图像分析的飞机图像由数字摄像机提供,高分辨率数字图像首先通过数字摄像机及网络通讯模块进行数据采集、接口转换处理,然后通过千兆网线传输至图像分析处理计算机进行分析、解算,得到着舰图像分析数据。
2.2 单目视觉测量原理
2.2.1 坐标系建立
首先对本文使用的坐标系设定进行定义,文中主要涉及到如下四种坐标系着舰坐标系、飞机坐标系(V坐标系)、像平面坐标系(P坐标系)以及像机坐标系(U坐标系),其设定关系如图2所示。
着舰坐标系坐标原点定为飞机着舰理想点,以跑道中心线为X轴,跑道平面向上为Z轴,跑道面为XY平面,Y轴由右手法则确定。
飞机坐标系的作用是提供一个与像机成像过程无关的、对飞机的三维结构信息进行描述的坐标框架。飞机坐标系以水平状态下质心为原点,指向机头为X轴正向,指向左翼为Y轴正向,向上为Z轴正向。
像平面坐标系是指以像机的主光轴与像平面的交点为原点建立的2D坐标系,本文设定像平面坐标系的x轴与图像的列方向平行,而y轴与图像的行方向平行,如图所示。
像机坐标系指的是以像机的光心为原点建立的3D坐标系,其z轴为像机的主光轴方向,x、y轴分别与像平面坐标系P的x、y轴平行。
2.2.2 成像模型分析
单目摄像测量求解飞机位置姿态的方法,需要事先标定获取摄像机的内外参数,才能得到摄像机坐标系与跑道坐标系之间的位姿关系,通过求解得到飞机坐标系与摄像机坐标系之间的位姿关系,这样即可转换得到飞机坐标系与跑道坐标系之间的位姿关系。
基于控制点标定像机的过程是:首先构造若干空间坐标己知的控制点,然后使用待标定像机采集控制点图像,再根据“空间控制点一一摄像机参数一一图像点”间的关系求解摄像机参数。本文中采用中心透视投影叠加非线性镜头畸变的成像模型,如图3所示。
3 基于控制点的摄像机参数标定
在进行着舰参数测量时,像机采用固定焦距和固定视场。摄像机标定主要是给出摄像机内、外参数,摄像机标定功能包含事先标定功能和实时标定功能。
在事先标定中,在跑道上设置若干个有效控制点,这些控制点要在图像上清晰可见,用全站仪获取这些控制点的坐标,当摄像机在完成扫描观察并稳定不动后,在飞机降落前拍摄一幅图像,标定子系统能够根据视场内特征目标的分布情况,用人机交互方式提取若干已知跑道坐标系下坐标的特征点线对应的像点,控制点和摄像机自身的坐标输入至系统中,进而依据共线方程组和畸变模型以迭代的方式高精度地求解得到后续数据处理所需的摄像机内、外参数。
实时标定与事先标定的原理和过程基本相同,但它是针对飞机着舰挂到目标索瞬间的图像进行处理。用人机交互方式,提取该幅图像下若干未被飞机遮挡,着舰坐标系下坐标己知的部分特征点对应的像点,旨在消除摄像机参数扰动可能对测量精度造成的影响。
4 飞机特征点高精度提取
在解算飞机着舰参数之前,需要提供飞机上结构尺寸为己知的4个点的坐标,在已经存储下来的飞机着舰图像中,通过提取这4个机身上的控制点,经过解算就得到了飞机在相平面坐标系中的二维坐标,將相平面坐标转换为着舰坐标,即可得到飞机在跑道坐标系中的坐标。
飞机合作控制点选取的原则是,标志点在飞机下滑着舰过程中尽量不要被机身遮挡,且相互间的距离尽量拉开,使得标志点在机体上均匀分布于飞机棱角边缘,便于进行人工或自动识别提取。飞机标定点的确定:机体共提取了机头、机尾和翼尖4个有效标定点,如图5示。
在机身控制点的提取过程中,首先采用人机交互的方式选定机身上己知的4个特征点,作为初始值,根据当前一帧目标位置预测目标当前特征点的位置,用最小二乘相关检测当前目标亚像素位置,将目标当前位置输出,并做为下一帧的目标初值。处理流程如图6所示。
为了验证本算法,我们使用飞机模型模拟飞机的着舰过程,并使用本算法对模型机上的特征点进行高精度的提取和跟踪,通过大量实验验证,该方法切实有效。图7为模型机特征点的提取和跟踪效果图。
5 飞机着舰参数解算
单目测量方法是利用透视成像的基本原理,在一定约束条件下通过,迭代求解二次非线性方程的近似解,进而求出像机与目标之间的相对位置关系。如图8所示。
假定目标上设置四个目标点A,B,C,D成正八边形布置,目标点在目标坐标系的坐标位置己知,正八边形的边长己知,每一个目标点大小尺寸己知,摄像机光学镜头的焦距f己知,摄像机的内外参数已标定完好。
6 试验效果与分析
6.1 测量效果
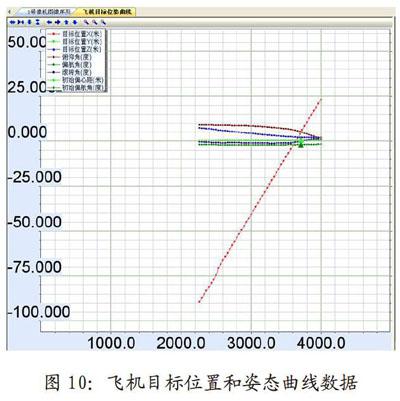
经过本系统处理后,将飞机的三维坐标、俯仰角、偏航角、滚转角、偏心距、偏航角和运动轨迹等数据绘制成曲线,可用来辅助判断飞机在着舰末段飞行轨迹是否异常,从而对飞行进行评估。处理之后的飞机着舰轨迹和位姿测量数据如图10所示。
6.2 精度分析
6.2.1 偏心距误差
偏心距测量精度与摄像机标定、镜头误差、时间定位误差、特征点位置提取精度等因素有关。摄像机标定误差与特征点结构尺寸误差和图像提取误差有关,由于标定是在静态条件下实施,其误差可以得到较好的控制。可以保证偏心距±0.2m的测量精度。
6.2.2 偏航角误差
对偏航角的测量精度,我们进行了仿真计算。仿真结果:飞机偏航角误差:0.12度。考虑到实际上各种不可预计因素,偏航角的测量精度可以达到±0.20。
我们在实验室搭建了仿真环境,使用模型机模拟飞机挂到目标索的飞行状态。像机以水平视角观察飞机,飞机头、尾、双翼尖共取4个特征点,特征点提取精度:1像素。
表l给出了本系统对仿真飞行测量数据与测量真值的初始偏心距、偏航角的结果比较,其误差均达到了指标要求。
表2给出了本系统对仿真飞行测量数据与测量真值的相对点的位置和姿态相减,得到运动轨迹上的所有点的偏心距、偏航角均差来比较测算结果。其误差达到了指标要求。
通过大量仿真飞行试验验证,本系统可以做到偏心距的误差不超过±0.2米,偏航角的误差不超过±0.20,因此该测量方法切实有效,数据精度满足实际应用要求。
7 总结
本论文以基于单目视觉的飞机着舰参数测量的实际需求为依托,研究在单目观测图像序列下自由三维目标的结构和运动参数的反演问题。获取观测目标的位置、姿态和轨迹等参数,在军事目标侦察、测量中具有重要的推广意义。
参考文献
[1]姜广文.基于可控旋转的像机高精度标定技术[J].光学学报,2010.
[2]冷大炜,基于单目视觉的三维刚体目标测量技术研究[c].清华大学博士论文,2011.
[3]于起峰.测量点目标运动参数的单目运动轨迹交会法[J].中国科学,2009 (12).
[4]晁志超,单目摄像机激光测距传感器位姿测量系统[J].光学学报,2011(03).
[5]王鲲鹏,基于目标特征点比例的单站图像定姿方法[J].应用光学,2009 (06).
[6]于起峰,用光测图像确定空间目标俯仰角和偏航角的中轴线法[J].国防科技大学学报,2008.
[7]邸慧,靶场图像预处理和目标运动单像机测量方法研究[C].国防科学技术大学博士论文,2007.
[8]张剑清.摄影测量学[M].武汉大学出版社.2009.
猜你喜欢
电子制作(2019年15期)2019-08-27
电子制作(2018年19期)2018-11-14
自动化学报(2017年11期)2017-04-04
中国生物医学工程学报(2017年6期)2017-02-10
广西科技大学学报(2016年1期)2016-06-22
计算机工程(2015年4期)2015-07-05
制造技术与机床(2015年10期)2015-04-09
机电信息(2015年3期)2015-02-27
机械工程师(2015年10期)2015-02-02
噪声与振动控制(2015年4期)2015-01-01