基于树莓派的无人机环境监测反馈系统
2018-02-25 02:39张玄王猛杜文乐
电子技术与软件工程 2018年7期
张玄 王猛 杜文乐

摘要 针对地面人员难以进入观测和耗费大量人力的区域,其环境实时监测与信息采集费时费力,设计出一款基于树莓派的无人机实时环境监测反馈系统至关重要。利用四轴无人机的稳定性和负载能力,搭栽树莓派核心处理器,借助Opencv库进行图像处理,以摄像头作为实时数据采集模块,以无线串口的信息交换方式进行实时数据的监测,以SMTP协议发送邮件作为数据回传,为地面人员提供及时、准确的环境监测信息。判断一定环境范围内的交通堵塞、人员聚集以及突发自然灾害等情况。
【关键词】图像处理 环境监测 无人机 树莓派
由于一些地区或场合的特殊情况,地面人员难以直接进行人眼观测,而且长时间监测费时费力,传统的环境监测在无人机方面的研究,莫过于进行遥感操作,而由遥感操作得到的图像判读、解译后获得的往往是对地物的大致估计,会和实际情况有出入,所以还应加强对地面环境信息的直接采集和数据的主动回传。四旋翼无人机由于其成本低、体积小、便于使用和维护的稳定设计特点为系统设计提供可行性的前提条件。树莓派通过GPS获取位置信息从而控制摄像头采集地面图像,并进行处理识别,然后将处理结果通过邮件回传到手机等终端。树莓派的快速处理回传构成完整的网络,实现环境实时监测。
1 系统总体设计
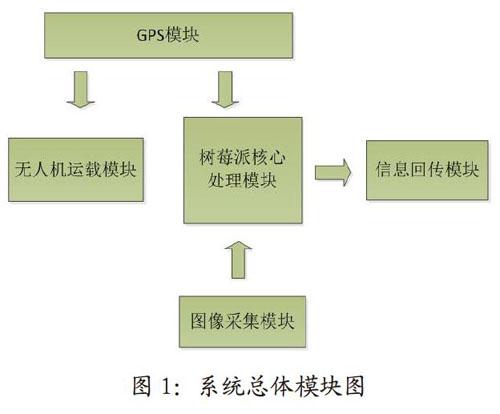
整体由树莓派核心处理模块、无人机运载模块、图像采集模块、GPS模块、信息回传模块组成。系统开始工作时,将指定地点的位置信息输入无人机APM飞控芯片和树莓派,通过手持遥感控制无人机起飞,无人机搭载树莓派与摄像头按飞行计划到达指定位置。当无人机到达指定位置时,树莓派控制摄像头进行图像信息的采集,然后对模板图片和采集照片进行图像对比处理,判断当前环境是否异常,并将结果通过3G网络向终端发送邮件实现数据回传,系统总体模块如图1所示。
2 系统硬件设计
2.1 整体硬件模块
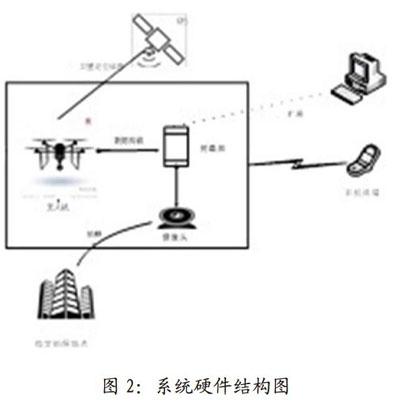
系统硬件结构主要由树莓派、摄像头、四旋翼无人机等组成。如图2所示。
树莓派属于核心处理模块,通过电压5V电流2A的锂电池供电,固定在无人机上;摄像头采用山狗相机通过USB接口连接在树莓派上;无人机充当运载设备,主要工作为运载设备从地面到达指定拍摄位置;APM芯片控制无人机的定高、定点飞行;华为上网卡通过USB连接在树莓派上提供网络环境。下面详细介绍一些主要硬件系统。
2.2 树莓派
设计使用的树莓派型号为3代B型,其系统基于Linux,是一个只有银行卡大小的微型电脑。树莓派3B搭载ARM Cortex-A5364位四核处理器,主频1.2Ghz,板载1GB内存(LPDDR2),树莓派3B有着丰富的外部接口,可连接诸多外围设备,诸如摄像头、GPS、舵机、键盘等,其CPU为ARM构建,该板卡可以像普通开发板一样作为算法运行模块,也可以同普通电脑一样,作为一台PC使用,体积更小,功耗更低,树莓派开发板具备足够的运算能力和充足的外部扩展接口,它有4个USB2.0接口,可连接驱动USB摄像头、USB-3G上网卡等设备,支持HDMI高清视频输出。有Python、C等程序语言的编译环境。
2.3 摄像头
SJCAM SJ6 LEGEND是一款运动相机,采用联咏96660主控芯片,支持1080P/30帧高清拍摄,1200万像素拍照,2 0英寸高清显示屏,7片高清光学玻璃镜头,高达1700的取景角度,入境画面更多,适合航拍,HDMI高清输出,它具有高清图像,高数据容量,树莓派可通过摄像头的USB接口提取并处理图片。
2.4 四旋翼无人机
四旋翼无人机与固定翼无人机相比具有体积较小、成本低、操縱灵巧、可以垂直升降等优势,采用APM2.8开源飞控,配合mission planner地面站软件可以在飞行过程中随时监测飞行姿态,自动调整空中参数,便于操控,也可以预先写入飞行计划,让无人机按照指定路径飞到目的位置,完成监测任务并自主返航。
3 软件系统设计
3.1 程序概述
程序设计主要包括通过串口获取GPS信息作为触发信号,控制摄像头获取一帧图像、图像处理、邮件回传等。利用树莓派获取指定位置的GPS信息后控制摄像头延时3s待无人机稳定后拍照;邮件回传主要利用Smtpliblib模块在服务器中的Python中提供处理邮件系统的接口,通过调用smtplib库使用SMTP协议进行简单的封装,从python脚本发送邮件信息。在这之前还需要通过QQ邮箱开启smtp/pop设置,获取配置邮件客户端字符码,从而能够使其在LINUX系统下发送邮件。
3.2 图像处理算法
图像压缩:根据实际需求,缩小图像使其更加清晰平滑。当图片被有损压缩时,组成图片的像素点减少,将有大量肉眼不可见的细节丢失,简化细节,从而提高python的运行速度,减少因处理图片而占用的内存。
图像分割:图像分割是把图像通过不同的划分标准来划分成若干个特定的、或者有特殊性质的区域,基于本项目.实地拍摄图像均为航拍图像,按照标志划分为不同区域,例如操场、教学楼、活动区等,通过图像分割将这些区域从一张图片上分割出来,并且单独进行对比监控,当发生异常情况时,可以迅速将其检测出来。
图像对比:本设计采用灰度直方图,用来描述图像灰度值的分布,其计算代价较小,图像对比可以对图像进行平移、旋转、缩放等,并且被广泛地应用于图像处理的各个领域。当两张图片拥有相同灰度,而颜色却不相同时,灰度值直方图会将他们视为同样的物体,存在的差异也将无法检测,基于这种情况,我们进一步选择颜色直方图进行检测。颜色直方图可以准确的识别出图片上任何颜色差异,比如火灾、车辆、气候等人眼可见的变化。通常伴随着色彩的突变,轮廓的变化事实上也是色彩区域发生变化,通过颜色直方图,我们统计颜色出现的区域,便可以将突变的色彩准确查找出来,也就是检测出了图像的异常。
判定结果分析:判定图像异常的临界值和无人机的稳定性有关。无人机实际运作中首先需要飞往一个地方,记录下当前的坐标以及拍摄并选取其中一张环境无异常且图像清晰的图像作为模板图,无人机第二次定点飞往同样的坐标再次拍摄实时图像与模板图对比匹配,判定是否有异常。无人机定点飞行能力以及在天空中保持平衡的能力均影响到临界的取值,临界值需要无人机大量飞行实验后才能得到一个较为准确的值。本文中的临界值设定为80%,处理结果如图3所示。
4 结论
本设计基于树莓派的无人机环境监测反馈系统,利用无人机的灵活方便和树莓派的强大处理能力,通过拍摄实际图像场景,运用该系统进行自主识别和检测,经过多次实验验证了该系统的功能实现、信息发送速度和传输范围、系统的稳定性等性能。解决了人们想实时快速了解周边环境区域内的交通状况、人员聚集情况以及突发(自然)灾害等问题。但是GPS的定位精度影响了系统的处理速度,有待改善,以及图像处理的速度也可以进一步改善。
参考文献
[1]张青,陈昌伦,吴狄,遥感技术在环境监测领域中方法运用研究[J].绿色科技,2015 (03):235-236.
[2]尤好,张新鑫,张朝晖,基于OpenCV和树莓派的运动检测[J].电子技术,2017 (02): 59-61.
[3]何春,一种基于直方图的图像二值化算法[J].宜宾学院学报,2016 (12):53-55.
猜你喜欢
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
科教导刊(2016年27期)2016-11-15
人间(2016年26期)2016-11-03
电气化铁道(2016年4期)2016-04-16
现代电子技术(2015年18期)2015-09-16
河南科技(2014年1期)2014-02-27