
基于功能分析的船用克令吊执行机构构型综合
2018-02-26 07:34郭正强潘宇晨袁雪鹏
装备制造技术 2018年12期
郭正强 ,潘宇晨 ,袁雪鹏
(1.广西科技大学 机械工程学院,广西 柳州 545000;2.广西高校临海机械装备设计制造及控制重点实验室培育基地,广西 钦州 535011)
0 前言
现有工程机械产品,如港作起重机械,其结构简单,操作方便,已广泛应用于港口集装箱等物资的搬运、码垛和运输作业中。以船用克令吊为例,主要为液压式驱动,还存在零部件加工装配要求高、维护保养成本高、寿命不长、漏油等缺点。船用克令吊以直臂式结构居多,为单自由度机构,运动轨迹单一又存在输出欠柔性等问题,另有的伸缩臂式和折臂式克令吊,具有多轨迹输出,但均为简单开链式结构,本身负载能力小,且易受海浪、风等因素影响导致末端执行器产生强烈振动,使得起重货物时易剧烈摇摆,危险程度高,整机稳定性和可靠性不足。这是包括船用克令吊在内的港作起重机械领域长期未能取得突破的一个棘手难题。
现有研究均是在已有起重机机型上进行,基于其结构本体在机构学层面展开的研究鲜为报道。而多自由度可控机构是机械技术与电子技术有机结合的产物[1],具有输出柔性化、刚度高、惯量低、结构稳定性好、承载能力强、动力学性能好等特点,获得了学术界的广泛关注[2-7],但结合工程实际应用的研究成果还较少。
为此,针对这些问题,以港作起重机械中的船用克令吊为结合点,全面分析其工作原理和输出动作要求,通过工作机理的行为表达方法将其转化为工艺动作过程,基于功能分析,结合多自由度可控机构以及并联机构[8],采用胚图插点法[9]完成执行机构的运动链数综合,获得一批新型多自由度可控机构式船用克令吊机构构型。
1 功能求解模型
寻求适合机械产品设计特点的功能求解模型是提高其创新程度和效率的关键。对于机械产品来说,其行为可以理解为各种各样的机械动作[10]。如图1所示为机械产品功能求解模型,即F-E-P-A-M模型。
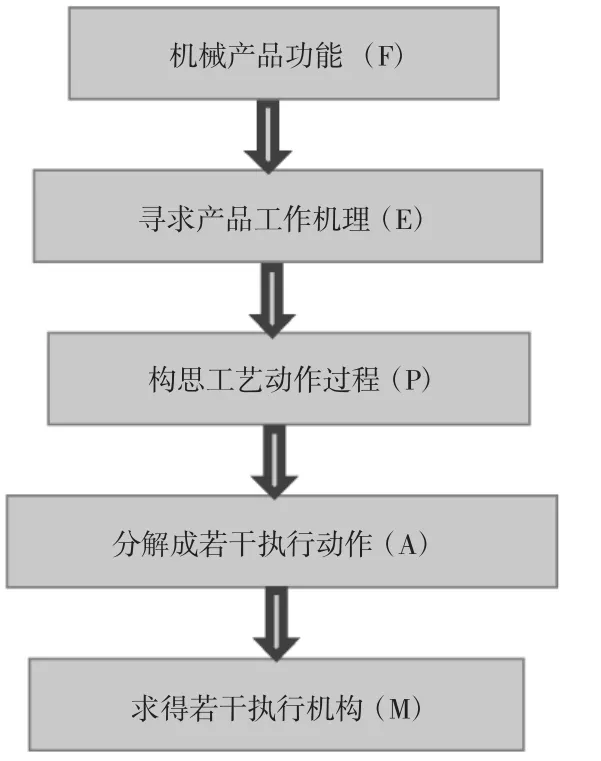
图1 F-E-P-A-M模型
2 传统船用克令吊的功能分析
2.1 船用克令吊的功能
船用克令吊,在船舶上用来装卸货物的一种大甲板机械,不仅能配合港口海岸货物的装卸,也能实现海上的货物交换和跨海跨河大桥、大坝、水库等重要设施的建设,广泛应用于起重船上,是起重船不可或缺的装置。
2.2 工作机理
船用克令吊起吊装置由吊臂、吊绳、吊钩以及回转装置、卷扬机和吊臂液压缸等组成。整个执行机构安装于船舶大甲板上,用以重物的装卸。目前分为直臂式、伸缩臂式和折臂式三大类,以伸缩臂式为例,回转机构安装于甲板上,举升液压缸于回转机构上和主吊臂铰接,用以升降吊臂,伸缩液压缸安装于主吊臂内部,用以伸缩副吊臂,配合卷扬机收放吊钩,整个执行机构的机械臂能实现平面内双自由度的运动输出,如图2所示。
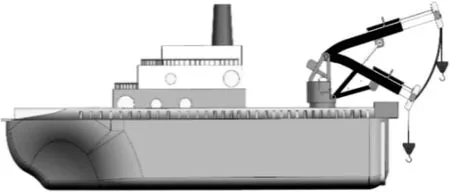
图2 伸缩臂式船用克令吊的工作机理
2.3 工艺动作过程
(1)执行机构随回转装置转到待起吊位置;
(2)举升液压缸和伸缩液压缸驱动,分别调整吊臂升降和副吊臂伸缩;
(3)卷扬机驱动,下放吊钩,执行机构处于待起重姿态;
(4)通过液压缸和卷扬机的联合驱动,吊钩起吊重物;
(5)配合回转机构,将重物移动至指定地点,液压缸收缩,卷扬机下放吊钩,完成重物的下放任务;
(6)通过回转机构回转到下一起吊地点。
2.4 起吊动作分解
船用克令吊的工艺动作过程可分为以下四个步骤,如图3所示。

图3 伸缩臂式船用克令吊工艺动作过程
3 运动链数综合及具体化
由功能分析可知,传统伸缩臂式船用克令吊执行机构具有平面二自由度,采用二组液压缸驱动,分别控制吊臂的举升和收放,配合回转装置可达到平面任意位置。但目前所有类型的船用克令吊均存在液压驱动零部件加工装配要求高、维护保养成本高、寿命不长、漏油等缺点以及轨迹输出单一,动作变化不灵活,缺乏柔性,且均为开链式机构,其承载能力有限,工作稳定性不足。为此结合连杆机构采用胚图插点法进行起重执行机构的构型综合。
根据自由度计算公式(1)对机构杆件数进行扩充,有:

式中:F为机构的自由度;N为杆件总数;PL为低副总数。
以三自由度机构为例,将F=3带入公式(1),可得

考虑执行机构的复杂程度,可令对其展开连杆类配。在运动链中,各种杆型的数目和运动副数目应满足下式:

式中:n2、n3、n4、nn为分别表示二杆副、三杆副、四杆副、n杆副的数目;N为运动链中杆的总数目;P为运动链中运动副的总数目。
由欧拉方程式得:

式中:L为运动链中内环数目。
本文以8杆9副构件为例,将P=9和N=8带入式(4)得:

可求得运动链内环数目为:L=2
按式(2)和式(3)进行连杆类配,其中该运动链中不可能含4副及以上连杆,其结果见表1.

表1 八杆九副运动链的连杆类配方案
由运动链内环数目分析可知,运动链拓扑胚图如图4所示。

图4 运动链拓扑胚图
采用胚图插点法将二度点分配到图4所示胚图中,剔除含刚性子链的结构类型及同构结构类型,可得如图5所示五种运动链。

图5 二回路胚图
将拓扑图中的二度点、三度点分别转化为二副杆、三副杆,并将拓扑图中的线转化为转动副,可得一般化运动链图谱,如图6所示。

图6 一般化运动链图谱
依据设计的平面三自由度连杆机构,其3个驱动元件均固定在水平机架上,以减少电机串联而产生的累积误差及末端运动惯量,增强末端承载力,故选取三副杆作为机架,且输出端应为二副杆,则满足条件的只有图6中(a)种运动链。将其构件具体化可得如图7所示的油电混合驱动执行机构。

图7 8杆9副油电混合驱动式船用克令吊
同理可采用相同方法综合出二自由度的5杆5副、7杆8副、9杆11副以及三自由度的10杆12副构件的所有运动链,具体不在累述。并分别给出相应的一种运动链具体化的船用克令吊机构构型,如图8所示。

图8 可控机构式船用克令吊机构构型
图8所示船用克令吊机构亦可采用多种方式进行驱动,如图8a可采用液压缸和电机联合驱动,图8b、c、d可采用全伺服电机驱动或常规电机和伺服电机混合驱动。可通过修正的Grübler-Kutzbach公式[11]分别对其进行自由度计算,计算结果如下:

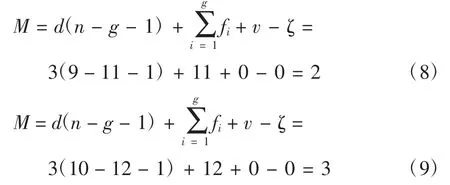
式中:M表示机构的自由度数;d表示机构的阶数;n表示包含机架在内的构件数;g表示所有运动副数;fi表示第i个运动副的自由度数;v表示冗余约束数;ζ表示局部自由度数。
此类可控机构式船用克令吊采用了独特的闭链连杆传动机构,多连杆铰接传动形式,具有多自由度。与传统平面单自由度船用克令吊相比,副臂的有效使用增加了水平方向的作业范围,输出更具柔性化,空间可操作性高,提高了机械臂多形式的运动方式,整机稳定性更高,承载能力更大。且均为外转动副驱动,驱动电机均安装在转台上或基座上,各杆件可制成轻杆,大大减轻了吊臂的重量及运动惯量。
4 结论
以船用克令吊为结合点,全面分析了其工作原理和输出动作要求,通过工作机理的行为表达方法将其转化为工艺过程,基于功能分析,结合多自由度可控机构以及并联机构进行构型综合。以8杆9副式运动链为例,采用胚图插点法完成了其运动链数综合,并通过约束筛选将可行运动链具体化,获得了全新结构的船用克令吊机构,结合此方法给出了一批新型多自由度可控机构式船用克令吊机构构型。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
机械设计与制造(2022年7期)2022-07-27
山东冶金(2022年1期)2022-04-19
石油和化工设备(2020年5期)2020-06-09
农业技术与装备(2020年1期)2020-03-04
制冷(2019年2期)2019-12-09
水上消防(2019年3期)2019-08-20
大陆桥视野·下(2017年8期)2017-09-19
中国航海(2014年1期)2014-05-09
导航定位与授时(2014年2期)2014-04-27
