
低空多旋翼无人机无线电干扰技术
2018-02-26 04:46廖有幸李振华
电子技术与软件工程 2018年14期
廖有幸 李振华

摘要 概述了低空多旋翼无人机的危害,分析了低空多旋翼无人机的控制及导航信号特征,根据干扰距离和干扰门限等指标计算了干扰信号功率强度,进行了外场试验,验证了无线电干扰的反制效果。
【关键词】旋翼无人机 干扰 遥控 导航
1 引言
近年来,以民用消费级无人机为代表的低空多旋翼无人机的不受控生产、使用、扩散和无序发展,使得此类目标市成为国家公共安全的非传统空中威胁,对公共安全形成了巨大威胁。
民用消费级无人机通常价格低廉、操作简单、容易获取,并且升空突然性强、发现处置困难。近年来,随着无人机计算机的发展,其载荷能力、续航能力均有较大程度的提高,无人机类型也呈现多样化趋势,用途也越来越广,使用方式也是多式多样。但是另外一个方面,一旦此类飞行器被不怀好意的人掌握,其造成的威胁也是显而易见的,我国已多次发生过低空多旋翼无人机扰乱正常航班的事件。
未来,多旋翼无人机反制技术必将在公共安全领域发挥重要作用。常规的导弹、火炮等防空武器都面临费效比低、使用有限制等问题。相比之下,利用无线电干扰反无人机是最实用、性价比最高的方法,受到了各国的关注。
2 目标性分析
目前所有的民用消费级无人机都需要用到卫星导航和遥控链路实现定位、控制、图传等功能。消费级无人机使用了无线电技术,就可以通过无线电进行干扰,扰乱其遥控链路和卫星导航,从而达到使无人机失控或折返的目地。
市场上具备遥控、拍照、摄像功能的高性能无人机产品如大疆品牌、零度品牌、早期固定翼遥控无人飞机等。其中,大疆品牌无人机占据市场主要份额,它的很多关键技术指标、通信方式在业界产品己形成行业标准,在无人机违规使用的相关报道中,大部分涉及该品牌产品。
经调研,目前无人机遥控信号主要工作在2.4GHz在和5.8GHz的ISM频段,频率范围:2400MHz~2483MHz和:5725MHz~5850MHZ。
主要采用的方式有以下几种:
(1)使用跳频扩频(FHSS)链路控制无人机,测控距離:1~5km;
(2)使用Wi-Fi控制无人机,测控距离:100~2000m:
(3)使用蓝牙控制无人机,测控距离:60~80m;
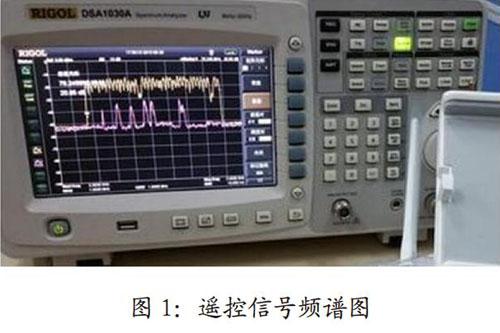
以大疆精灵3为代表进行对象分析,大疆精灵3遥控信号工作在2.4GHz,采用了扩频一调频相结合的技术体制,遥控器配对之后,在工作带宽内以1Oms的间隔快速跳频,频点范围涵盖整个2.4GHzISM频段。
将频谱仪频率范围设置在2.4GHz~2.5GHz之间,可以在频谱仪上看到快速扫描的信号,打开maxhold功能,经过一段时间的累积,就能清楚的看到遥控信号的频率分布范围:以2.44GHz为中心,共占据了78MHz的带宽,如图1所示。
几乎所有的消费级无人机都使用GPS来获取位置信息,也有部分型号支持GLONASS、BD2等导航信号,信号频段主要覆盖1560MHz~1610MHz。
3 处置方法
通过以上的目标特性分析可知,可以通过对低空旋翼无人机的遥控链路和卫星导航进行干扰,进入失控状态,触发无人机自身的保护机制,使之迫降或返航。
假设遥控信号的频率范围是2400~2485MHz,干扰者不知道跳频信号参数,就只能用噪声覆盖全部调频带宽,即黄色区域。而遥控信号带宽较窄,功率集中,功率电平比干扰信号总功率小的时候,依然不受干扰影响,如红色区域。对于采用跳频的遥控器,窄带干扰效果不好,只能使用宽带噪声干扰信号,覆盖整个跳频带宽。
遥控链路包括2.4GHz和5.8GHz两个频率点。这两个频点属于公开频段,市场上绝大部分消费级无人机使用这两个频率作为遥控和图传频率。消费级无人机遥控发射机的功率通常为毫瓦级,以大疆精灵3无人机为例,其2.4GHz遥控频段发射功率为23dBm。遥控器配置普通发射天线,增益约3dB,无人机接收天线增益也为3dB,设遥控器距离飞机100米,则2.4GHz接收器收到的功率电平最大为:
23(遥控器发射功率)+6(收发天线增益).(32.45+20xlg(0.1*2400》(电磁波自由空间衰减)=-51dBm
以遥控接收器抗干扰门限JSR=12dB为例计算干扰功率:
接收器接收的最大功率电平:Ps=-51dBm,
信号频率:f=2400MHz,
接收天线增益:G=3 dB.
干扰距离R=lKm,
干扰起效时,干扰等效辐射功率需满足
J-[32.45+20xlg(fxR)]+G-JSR≥Ps
计算可得,干扰距离lKm时,2.4G遥控链路干扰等效辐射功率需满足:J≥55dBm。
4 试验验证
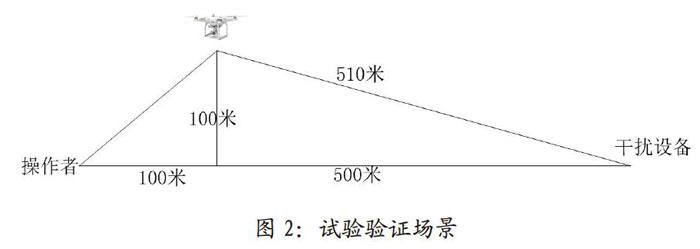
使用开发的干扰设备验证了干扰效果。使用精灵3无人机,操控者控制无人机起飞后悬停,飞行高度约为100米左右,无人机地面投影距操作者100米,干扰设备距无人机投影500米。具体试验场景如图。分别对无人机的遥控信号和导航信号进行干扰。如图2所示。
验证结果:
(1)干扰遥控信号时,无人机上指示灯由绿色闪烁变为黄色闪烁,几秒钟后,无人机返回起飞点。
(2)干扰导航信号时,无人机上指示灯由绿色闪烁变为红色闪烁,无人机能操控,不能稳定悬停。
(3)干扰遥控信号和导航信号时,无人机上指示灯由绿色闪烁变为红色闪烁,无人机不能操控,不能稳定悬停。
5 结束语
如图3所示,通过干扰试验,验证了无线电干扰效果,说明了对低空多旋翼无人机实施无线电干扰可以使无人机迫降或返航,中断图传信号,达到有效反制的目的。
参考文献
[1]艾洪昌,王春生,我国民用无人机管理现状探析[J],管理观察,2015,3(07):191-192.
[2]何煦,对低空小型无人机的对抗方法研究[J].中国新通信,2016,8(04):147-149.
[3]何中翔,李鹏程等,针对多旋翼无人机的高效压制技术[J].电子信息对抗技术,2017,32(03): 42-47.
[4]施林,刘伟,基于卫星导航欺骗干扰的无人机管制技术[J].指挥信息系统与技术,2017,8(01): 22-26.
