
基于开源的四旋翼飞行器
2018-02-26 04:46吴正茂李思海吴勇顾振华
电子技术与软件工程 2018年14期
关键词:开源
吴正茂 李思海 吴勇 顾振华

本文首先介绍了四旋翼飞行器的概念和开源的内涵及发展情况,接着阐述了采用开源的四旋翼飞行器作为实践平台的意义。其次,介绍了四旋翼飞行器的飞行原理,重点设计了基于开源飞控APM的四旋翼飞行器,经调试成功实现了飞机的各种运动。文章最后总结了该实现飞行器的要点,并说明了下一步的研究方向。
【关键词】四旋翼飞行器 开源 APM 调试步骤
四旋翼飞行器(Four-rotor aircraft,orQuadrotor)又叫四轴飞行器或四旋翼直升机,其四个电机和相应的螺旋槳安装在机架上,机架按照“十”字形或“X”字形布局。飞行器通过改变电机转速获得机身的升力,并通过力矩的平衡调整自身姿态,实现飞机的各种运动。四旋翼飞行器是目前高校和企业的研究热点,技术已经相对成熟,并广泛应用于航空拍摄、军事侦察与打击等各个领域。如图1所示。
开源技术利用了人类内心深处分享和帮助彼此的本能,实现了技术的发展。“开源”这一词语正式被使用,是在90年代后期OSI(开放代码促进会)成立时,早期开源的大部分注意力都集中在开源软件上(OSS),但1997年,Bruce Perens(开源定义的创造者,OSI的共同创立者,同时也是一个业余无线电操作员和爱好者)发布了开源硬件认证程序,该程序允许硬件开发者将他们的产品自行认证为开源。开源硬件在开放交换设计的过程中也促进了技术的发展。最近几年,由于开源技术的运用可以大大降低企业信息化建设成本,增加了IT的灵活度,个人开发者、企业用户、IT服务商和IT厂商等都对开源技术表现出了极大地热情。特别是一些互联网企业如GOOGLE在开源应用中尝到了甜头,如Android自2007年以开源形式发布以来,其阵营以爆发式增长,如今已成为市场占有率第一的移动操作系统。随着这些著名企业的示范作用,如今开源技术已经成为企业进行信息化建设的首要选择。随着开源技术的逐步成熟以及企业对开源技术的应用能力逐步提升,开源技术将会爆发更大的力量。
1 引言
开源技术开放、自由和协作的特点对教育信息化、教学模式的改革、学生实践平台的搭建与创新能力的培养也具有很大的促进作用。它可以将理论和实践有机结合,有效解决大学教育与业界实际的衔接问题,还可以增强学生的学习兴趣和内生学习动力。
四旋翼飞行器因为软硬件均开源,使得原本高大上的技术变得入门容易,也有一定的趣味性,而且飞控成熟度高,开发工具齐全,社区建设完善,开发者文档丰富,特别适合飞行器爱好者入门和二次开发,正逐步取代传统单片机开发板,成为飞行器爱好者和电子信息、计算机类学生进一步学习电子、计算机或嵌入式系统应用和实践的平台。四旋翼飞行器采用单片机或ARM处理器控制无刷直流电机,并且通过加速度传感器和陀螺仪的反馈数据进行飞行器的平衡控制和姿态调节。该飞行器平台综合了电子学、电机学、计算机、自动控制原理、空气动力学等多门学科的知识,可以满足学生在硬件设计和算法仿真与实践方面的要求。
目前在四旋翼飞行器的研究领域,开源的APM应用广泛,其升级版本是PX4和PIXHAWKo APM全称ArduPilotMega, Ardu源自Arduino,Pilot意指飞行,Mega代表主芯片为ATMEGA2560,因成本低,资源丰富,多用于DIY和小型产品。而商业公司则多采用PX4。
2 四旋翼飞行器的飞行原理
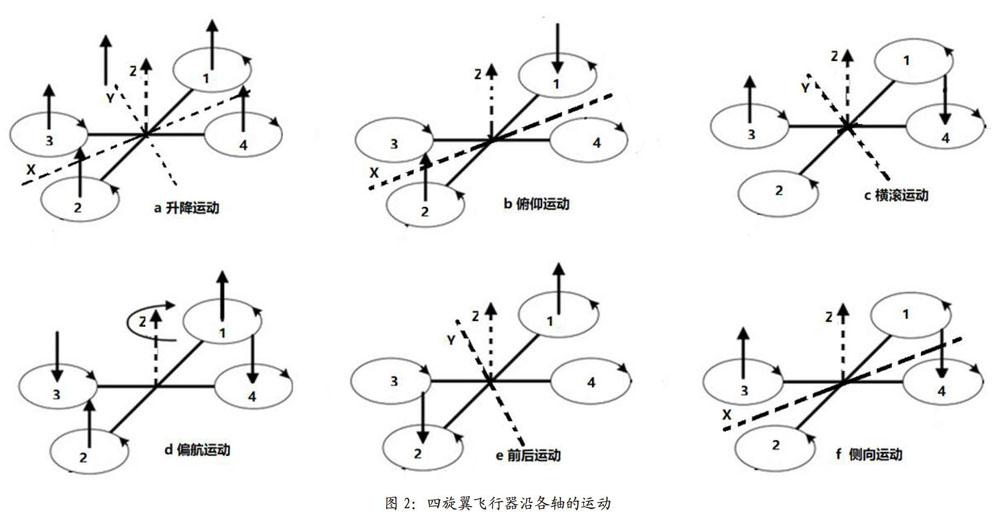
四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统,其中俯仰运动和前后运动耦合,横滚运动和侧向运动耦合。
在图2中,电机1和电机2(安装正桨)作逆时针旋转,电机3和电机4(安装反桨)作顺时针旋转,规定沿Z轴方向运动为升降运动,沿Y轴方向运动称为向前后运动,沿Y轴方向运动称为向左右运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
3 四旋翼飞行器的硬件设计与选型
四旋翼飞行器的硬件主要包括机架、飞行控制器和动力系统。
3.1 四旋翼飞行器的硬件架构
机架采用轴距为450mm的标准机架,材质最好是能防摔的碳纤维,采用“X”布局,其特点是稳定,驱动好,但调参相对复杂。
3.2 APM2.8开源飞行控制器
apm2.8开源飞行控制板上集成了陀螺仪、气压计等相关的传感元件,外接电子罗盘与GPS模块可以满足不同飞行模式下对飞机性能的不同要求。多个电子调速器分别对各自的电机进行控制,以达到平稳输出动力的要求。2.8系列是APM中最新的同时也是最稳定的。主控制器为ArduinoMega2560单片机,时钟主频16MHz,包含15路PWM输入输出口,16路模拟I/O口,54路数字I/O口。板载传感器包括整合三轴陀螺仪与三轴加速度计的六轴惯性测量单元MPU6000,测量三轴角速度、三轴加速度,结合GPS的高度信息,实现飞行器的姿态解算,计算出飞机姿态;高精度数字空气压力传感器MS5611,测量空气压力,用以换算成高度;三轴磁力计HMC5883,测量飞机当前的航向。APM飞行控制器控制系统采用的是双级PID控制体系,分别是导航级和控制级。导航级PID控制就是通过指定的飞行器的姿态参数,包括飞机的预定速度,飞行的预定高度,飞行器的航线路径,主控制器通过控制算法计算出飞机需要的俯仰角、方向角和横滚角,然后提供给控制级进行控制解算。
3.3 动力系统
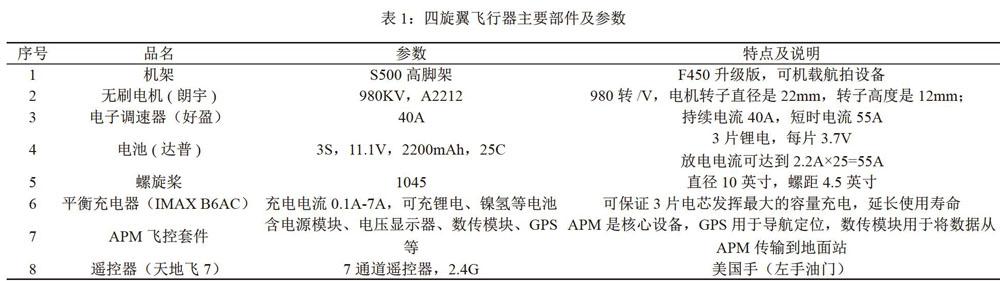
四旋翼飞行器的动力系统主要包含无刷电机、电子调速器、电池和螺旋桨。根据四旋翼飞行器机架的大小,本文选择的是kv值为980的2212无刷电机,配以1045螺旋桨,选择输出电流为40A的电子调速器,配备3S11.1V锂聚合物航模电池,详情见表1。
4 软件加载调试与实现
当硬件设计与安装完毕后,接着是APM飞行控制器的固件加载(写入程序)、调试、设置和监控等所有操作,这些操作都在地面站调试软件(Mission Planner,简称MP)中完成,MP是也是核心的开源软件。
4.1 地面站调试软件Mission Planner简介
地面站MP适用于固定翼,旋翼机和地面车,除了固件加载、调试和参数设置外,还负责飞行任务规划、监测和记录四旋翼飞行器的各项飞行信息,并把这些信息通过电脑显示器直观地显示出来,MP也可以直接发送指令操控飞行器的飞行。地面站与APM飞行控制器通过无线数传模块相连。
4.2 调试步骤
4.2.1 安装地面站调试软件Mission Planner
在安装MP之前,需先下载NetFramework 4.0并安装,然后开始下载MP安装程序包,最新版本的MP可以选择官网下载http://ardupilot.org/ardupilot/index.html.。下载页面中,每个版本都提供了MSI版和ZIP版可供選择,如果是第一次安装使用,建议下载MSI版。
4.2.2 连接USB线,下载APM固件
APM固件下载可以利用无线数传模块或USB完成。从功能上看,数传与下载程序兼具串口功能的USB线别无二致,只是形态上有别而已。二者的技术基础是串口以及基于串口的Mavlink通信。
4.2.3 连接遥控器接收机和USB线,完成APM的遥控校准、加速度校准和罗盘校准
当一个全新的固件下载到APM板以后,需要做遥控输入校准、加速度校准、罗盘校准等,否则,解锁是不能进行的,MP的姿态界面上也会不断弹出红色提示。
4.2.4 完成各类参数的设定
APM飞控的功能切换是通过切换飞行模式实现的,配置飞行模式前同样需要你连接MP与APM,点击Config/Tuning(配置调试)菜单,选择Flight Modes,配置相应参数。只有在稳定模式( Stabilize)、特技模式(ACRO)、定高模式(AltHold)、悬停模式(Loiter)才能解锁。
4.2.5 整理飞机,完成各类安全检查后试飞
详细调试步骤和注意事项可以参考部分航模制作网站。
5 结束语
本文是基于开源技术,其核心是APM飞行控制器和相应的飞行控制程序以及调试软件,设计并制作了了一款结构简单、性能稳定的四旋翼飞行器,该飞行器可在不同操控模式下实现不同飞行模式的飞行。通过MissionPlanner地面控制站,可对飞行器的各个飞行参数进行监控。由于该技术成熟而且软硬件资源丰富,很容易实现,非常适合飞行器爱好者和电子、自动化类专业学生学习实践。另外,该款飞行器的开源性以及上面预留的外界接口模块丰富,这为后续的深入学习研究提供了较好的基础飞行实验平台,如可以升级处理器、加装摄像机实现航拍、根据需要裁剪源代码,修改控制算法、验证控制结果等,具有广阔的二次开发应用的前景。
参考文献
[1]郭嘉凯,开源的力量[J].软件与信息服务,2015(03).
[2]杨静,程文娟,安宁,王浩.基于开源技术的学生实践与创新能力培养[J].计算机教育,2012(03).
[3]韩志风,李荣冰,刘建业,杭义军.小型四旋翼飞行器试验平台设计[J].测控技术,2013 (10).
[4]赵恒,张有光,王俊,张玉玺.跨专业综合实践平台建设初探-以无人机平台为例[J].工业与信息化教育,2016(07): 90-94.
[5] ht tp:∥ardupilot.org/ardupilot/index.html.
[6]鲍凯.玩转四轴飞行器[M].北京:清华大学出版社,2015.
[7]陈海滨,殳国华,四旋翼飞行器的设计[J].实验室研究与探索,2013 (03).
[8]王亭岭,卢杜洋,马跃涛.PIXHAWK开源飞控的多旋翼无人机避障技术研究[J].单片机与嵌入式系统应用,2017 (10):30-32.
猜你喜欢
体育师友(2022年1期)2022-04-17
软件和集成电路(2020年8期)2020-11-28
创新作文(1-2年级)(2019年3期)2019-09-03
软件和集成电路(2019年7期)2019-08-30
办公自动化(2016年18期)2016-08-20
办公自动化(2016年18期)2016-08-20
信息记录材料(2016年4期)2016-03-11
交通科学与工程(2015年1期)2015-12-23
上海理工大学学报(社会科学版)(2015年3期)2015-11-30
中国信息化(2015年12期)2015-03-29
