基于无人机遥感平台的铁路测绘航空摄影若干问题探讨
2018-03-02 07:07肖苏勇
铁道勘察 2018年1期
肖苏勇
(中铁第四勘察设计院集团有限公司,湖北武汉 430063)
近年来,无人机在航空摄影应用方面得以普及,但是对机载测量部分的研究较少。结合无人机机载GPS/BD辅助航摄系统在当阳至远安铁路及长赣高铁测绘的实际应用,对利用无人机作为遥感平台进行铁路测绘航空摄影的若干问题进行探讨,以期能够为铁路乃至公路测绘航空摄影在大比例地形图上的应用提供借鉴。
1 机载GPS/BD辅助航摄系统简介
利用固定翼遥感平台(无人机、轻型机、运输机)搭载框幅量测数码相机,无需架设地面基站,加载机载GPS/BD辅助航摄技术,进行大比例航空摄影(见图1)。
利用安装在飞机上的双频GPS/BD接收机连续观测记录GPS/BD卫星信号,同时获取航摄仪快门打开至最大的脉冲时刻与快速星历事后处理航摄仪曝光瞬间的空间三维坐标,将其视为带权观测值引入摄影测量区域网平差中,采用相同的数学模型来整体确定地面目标点位和相片方位元素,并对其质量进行评定。

图1 无人机机载GPS/BD辅助航空摄影系统
2 小型航摄系统
2.1 遥感平台
机载GPS/BD辅助空三需要测定相机在空中曝光瞬间的3个线元素。因此,在飞机静止时,GPS/BD相位中心与曝光中心存在三个偏移分量u,v,w。飞机在飞行过程中,会产生三个姿态角,在曝光瞬间,这三个姿态角在坐标传递过程中形成一个旋转矩阵R。GPS/BD相位中心与曝光中心的位置关系如图2所示。
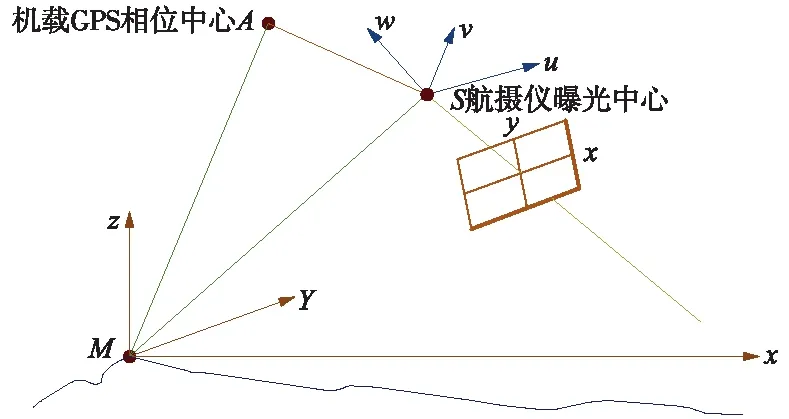
图2 GPS/BD相位中心与曝光中心在空中的位置关系
公式(1)描述了如何将GPS/BD测定的空间位置传递到相机曝光中心。
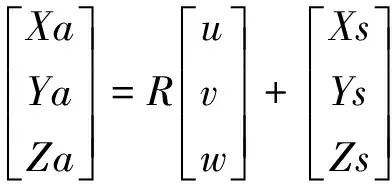
(1)
2.2 传感器
传感器是获得二维像平面坐标的测量元件,其相机内方位元素(f,x0,y0)的稳定以及相机镜头畸变差的有效消除至关重要。考虑到机载GPS/BD辅助空三的需要,相机曝光快门开启到最大时向GPS/BD发送一个高频脉冲(EventMark)并记录到GPS/BD文件,之后通过该时刻内插出每一摄站位置。EventMark时刻的准确性影响到摄站坐标的精度,必须对相机脉冲信号进行标定,使其处于相机快门打开与关闭的中间时刻。
一亿像素级的工业相机在其物理结构上满足上述需要,但还需对其内部控制进行软件修正。本套系统采用的工业相机由AIC-Lover软件进行修正,可满足航摄仪的要求。
2.3 飞行姿态
测绘航空摄影是近似垂直航空摄影(见图3),由于摄影倾角仰俯(航向φ角)和测滚(旁向ω)分量的存在,在一定程度上造成立体模型的高程面扭曲(见图4)。为了使从像方到物方的坐标变换满足测量规范限差的要求,一般要求摄影倾角α小于3°。

图3 摄影倾角
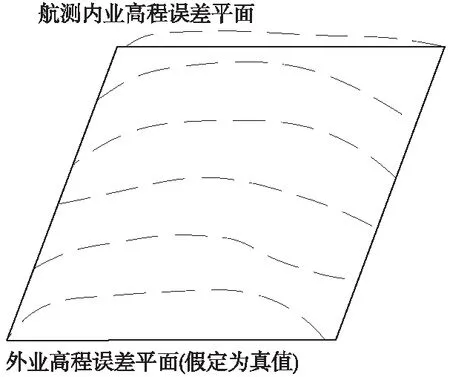
图4 航摄倾角对立体模型高程面的扭曲
为了有效限制摄影倾角对立体模型造成的高程扭曲,必须采用三轴姿态校正装置对无人机航空摄影进行校正(见图5)。

图5 小型三轴稳定座架
2.4 机载GPS/BD辅助空三
采用载波相位差分动态GPS/BD定位技术可以达到厘米级精度并确定GPS/BD天线相位中心的坐标,但坐标值包含有随时间变化的线性飘移系统误差;为获得国家统一坐标系或局部坐标系中的加密成果,需要有一定数量的地面控制点(GCP)。最好在区域的四角布设4个平高点;如果需要逐条航线改正GPS/BD摄站坐标的系统漂移误差,则区域的两端还应布设两排高程控制点或加摄两条带有GPS/BD摄站坐标的垂直构架航线(见图6)。
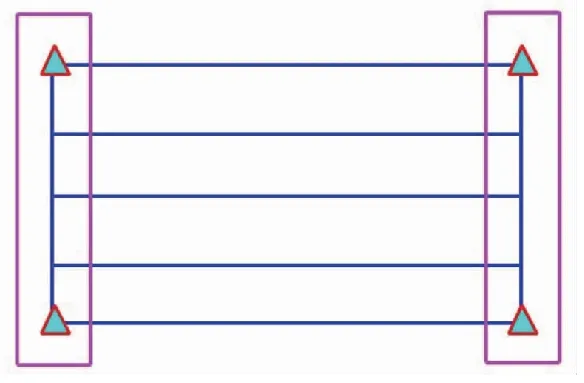
图6 像控布设示意
Imagnation将时间作为测量变量,进行整体平差,将摄影测量拓展到四维空间,配合构架航线,可有效地改正GPS/BD存在的系统误差累积,大幅度提高航测高程精度。
3 应用案例
3.1 案例一
当阳至远安铁路是一条山区铁路,贯通方案长63.3 km,线路曲线半径小,高差起伏大,植被茂密。若采用传统固定翼有人驾驶飞行平台搭载航摄仪的航空摄影方式,在保证地面分辨率的前提下,飞行的安全高度无法保证,且测区中植被茂密,可选的像控点有限。鉴于以上情况,选用无人机机载GPS/BD辅助航摄系统进行航空摄影并布设构架航线,共飞行测段9个,航线21条,共计240 km(由于其像幅较小,大部分采用双航线或多航线)。利用自主研发的Imagnation机载GPS/BD辅助空三系统,共布设28个地面外控点,18个加密检查点。其中,第8测段布点时未按该空三系统要求的布点方式进行,故采用其它空三软件进行处理。空三加密成果如表1。
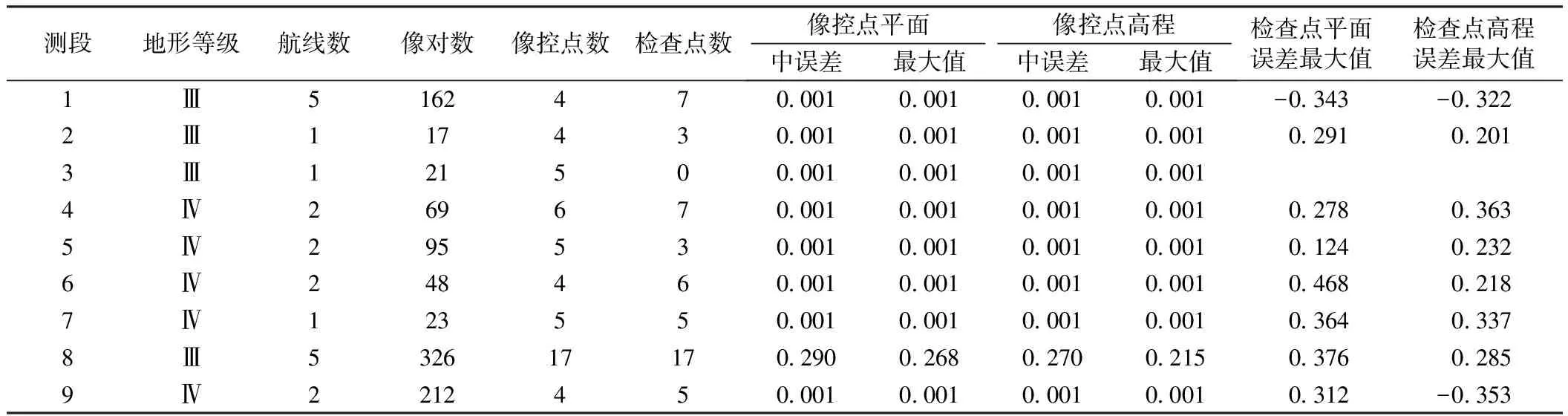
表1 像控点及检查点加密精度统计 m
为检查该项技术的可靠性,在测区中用RTK方式实地测量150个散点(包含地物点和高程点),对所生产的地形图进行精度统计(见表2)。
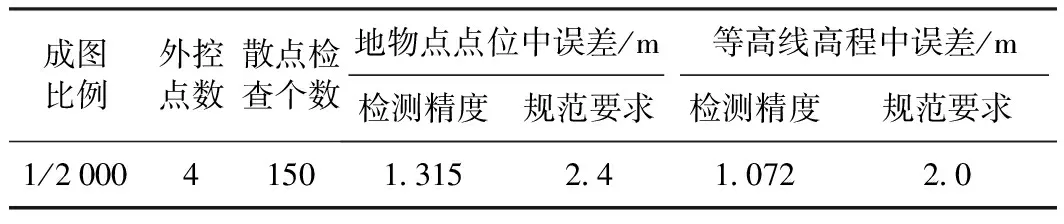
表2 地形图检查点数据统计
3.2 案例二
长赣铁路某段收集的影像资料无法满足成图要求。选用无人机机载GPS/BD辅助航摄系统进行航空摄影,线路方案长119.5 km,采用构架航线,共设计飞行测段10个,航线28条,计280 km(采用双航线的方式)。利用自主研发的Imagnation机载GPS/BD辅助空三系统,地面共布设33个外控点,22个检查点。空三加密成果如表3。
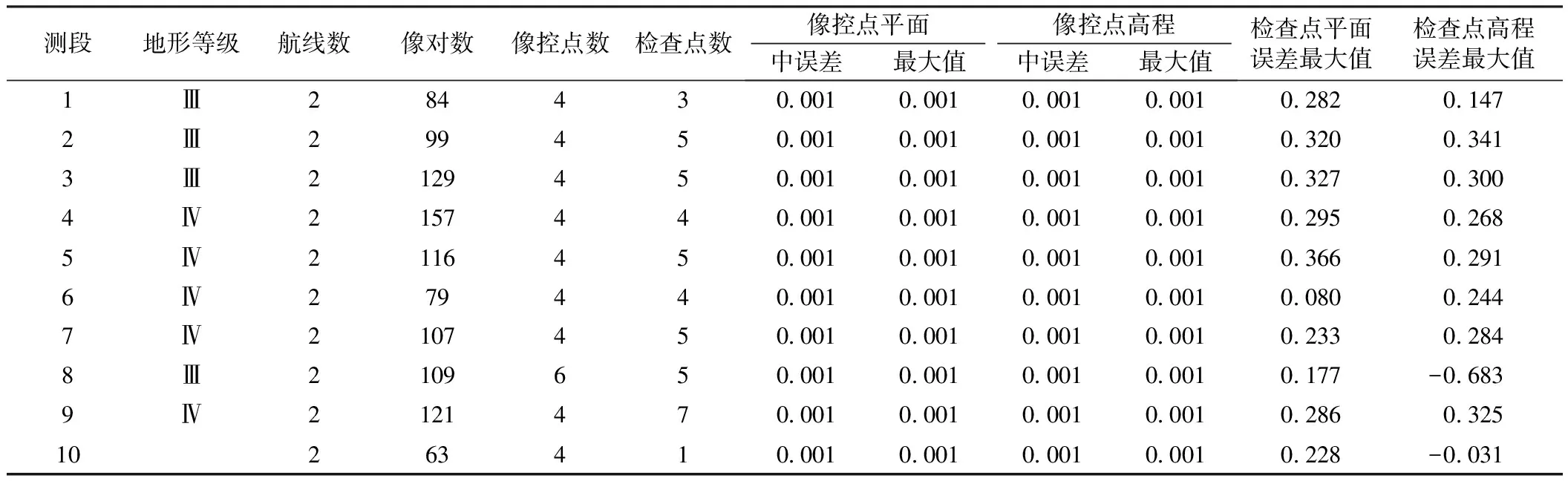
表3 像控点及检查点加密精度统计 m
在测区中用RTK方式实地测量200个散点(包含地物点和高程点),对所生产的地形图进行精度统计(见表4)。

表4 地形图检查点数据统计
若采用传统固定翼有人驾驶飞行平台搭载数码航摄仪的航空摄影方式,在保证地面分辨率的前提下,虽然航线数可相应减少,但外控点测量的工作量会大大增加。按《铁路工程摄影测量规范》数字摄影外控点的布设要求,当阳至远安铁路正线加比较线共113.3 km,外控点布设应为70个左右;长赣铁路某段正线加比较线共119.5 km,外控点布设应为76个左右。而采用无人机遥感平台技术,外控点的布设大为减少:当阳至远安铁路仅布设了28个外控点;长赣铁路仅布设了33个外控点,生产效率大幅提高。从飞行情况看,在保证地面分辨率优于0.2 m的前提下,传统数码航空摄影(数码航摄仪焦距90 mm)飞行相对航高应为3 600 m左右,而且需要有一定跑道长度的机场进行起降;航空摄影时又存在空域管制、手续复杂、对机场和天气条件依赖性较大、成本较高、航摄周期长等问题;而无人机遥感平台技术的航空摄影飞行相对航高仅为1 500 m,只需一空旷场地即可弹射起飞,机动灵活,操作性强,对天气的要求相对较低,航摄周期较短。
4 结论
采用无人机机载GPS辅助航空摄影,可大幅缩短摄影周期;航测外业控制点布设大幅减少,空三加密成果及地形图散点检查精度均满足《铁路工程摄影测量规范》平面及高程要求,降低了测量成本,经济效率得到极大提高,为全面推广该项技术提供了真实可靠的各项生产数据。
[1] 袁修孝,高宇,邹小荣.GPS辅助空中三角测量在低空航测大比例尺地形图成图中的应用[J].武汉大学学报(信息科学版),2012,37(11):1289-1293
[2] 吴巧玲.大比例尺影像航测像控部点方案探讨[J].测绘通报,2009(5):35-37
[3] 石华胜,王守康,高宇.利用轻型机机载GPS辅助进行大比例尺地形图航测[J].测绘通报,2013(7):46-48
[4] 张建军,高宇.平坦地区像控点采用GPS拟合高程的探讨[J].地理空间信息,2008,6(3):21-23
[5] 连镇华.无人机航摄相片倾角对立体高程扭曲的影响分析[J].地理空间信息,2010,8(1):20-22
[6] 吴巧玲,董祥林,高宇.利用高程二次定向提高无人机航测高程精度的探讨[J].测绘通报,2011(7):12-14
[7] 傅长刚.民用数码相机可量测化的探讨[J].地理空间信息,2009,7(6):147-149
[8] 张祖勋,张剑清.数字摄影测量学[M].武汉:武汉大学出版社,1997
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
资源信息与工程(2021年5期)2022-01-15
天津医科大学学报(2021年4期)2021-08-21
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
航空知识(2019年1期)2019-01-11
企业科技与发展(2018年5期)2018-09-10
环球飞行(2018年7期)2018-06-27
计算机应用(2017年1期)2017-04-17
中国非金属矿工业导刊(2015年5期)2015-12-22