南极航空地球物理调查GPS 数据后处理方法试验
2018-03-03 05:58王帮兵王旭琦孙波蔚林哲郭井学崔祥斌
极地研究 2018年1期
王帮兵 王旭琦 孙波 蔚林哲 郭井学 崔祥斌
(1浙江大学地球科学学院,浙江 杭州 310027;2中国极地研究中心,上海 200136)
0 引言
极地冰盖在全球气候系统中扮演着重要角色,其冰量变化和物质平衡状态对于全球海平面变化具有决定性影响,进而影响全球气候系统[1-2]。在全球气候变暖的大背景下,对极地冰盖的监测和预测具有重要的科学意义,地球物理探测是极地现场考察中最重要的技术手段,并已取得巨大成功[3]。然而极地严酷的自然环境(低温、冰雪覆盖、夏季时间短等不利条件)严重制约着地面科考测量工作的开展,使得极地航空地球物理考察成为最有优势和发展潜力的研究方向[4]。但是航空测量的装备投入、运行维护成本、技术支持保障等费用惊人,非一般国家国力能够承担。随着我国综合国力的增强,经过多年努力,中国成为继美、英、德之后,第 4个拥有极地航空地球物理科学考察能力的国家,在 2015—2016年度中国第 32次南极科学考察期间,完成东南极伊丽莎白公主地(Princess Elizabeth Land,PEL)区域18条测线的飞行探测任务,获得一大批珍贵的科学数据,吸引了全世界关注的目光。
极地航空地球物理平台搭载了多种探测设备,包括高精度航空重力仪、高精度航空磁力仪,大功率航空雷达以及温度、照相、激光测距等设备;一个航次飞行可以同时完成多方法、大范围探测任务。所有测量设备中,最为基础和关键性的配套设备是GPS定位系统,主要用途包括:(1)飞机上至少安装一台4通道GPS系统,与IMB(惯导系统)模块一起提供飞机飞行姿态信息,为航空重力仪、航空磁力仪等地球物理设备提供校正和补偿等关键数据;(2)为各机载地球物理设备提供统一的时钟同步和授时,确保所有设备采集的数据按GPS时钟同步记录、存储,便于后期统一处理并得到各测点数据对应的精确位置。因此,后处理工作的首要目标就是解算GPS数据,为快速飞行的飞机(对应顺序得到地球物理测点位置)提供精确的定位信息。
航空地球物理数据后处理的难点在于:(1)飞机上集成的探测设备众多,各方法数据需要分别处理; 处理后的GPS精确定位数据需要分别与各方法对应测点探测数据匹配连接,工作量极大。(2)不同设备的采样率差异大,导致不同方法数据量差异大; 而GPS数据按0.5 s时间采样,需要通过插值等处理来适应不同探测方法的差异性采样率,确保该方法每个物理测点的物理量值都有相应的位置坐标。由于这是国内首次开展极地航空地球物理探测,所有工作都是全新的任务,需要通过试验不断摸索、总结解决问题的思路和方案,其中 GPS定位数据处理和物探数据的匹配连接成为航空地球物理数据后处理工作中的一项基础且关键性的研究内容。本文针对中国第32次南极科考航空地球物理探测定位测量的目标需求,通过实验对比方法,评估GPS后处理方法和软件的效果,在试验基础上开发相应的软件完成GPS数据和各地球物理方法数据的匹配连接,进而总结极地航空地球物理GPS后处理流程和方法,对于极地航空测量及工程应用具有现实指导意义和参考价值。
1 方法技术
1.1 研究区域及现场工作布置
2015年11月—2016年4月中国第32次南极考察期间,以中山站附近的俄罗斯冰盖机场为起点,完成18个航次的航空地球物理探测任务。飞行范围覆盖东南极伊丽莎白公主地(PEL)区域,项目命名为ICECAP2。为了最大程度地优化飞行测线布置,经过多轮国际专家论证,采用扇形飞行测线布置。图1为设计飞行测线,项目实施过程中,根据科研目标调整了部分飞行计划,包括飞越Dome A、连接Vostok冰下湖、与ICECAP测线对接等更长距离的目标探测,验证了雪鹰601良好的机械性能和优异的极地探测适应能力,并获得了一大批珍贵的航空探测数据。在飞机转场过程中也同时进行不间断测量,使得ICECAP2航空探测数据与整个南极探测数据连接成一个有机整体,可以充分利用国际前期探测成果和深冰芯资料,大大提升了本次航空探测数据的科研价值。
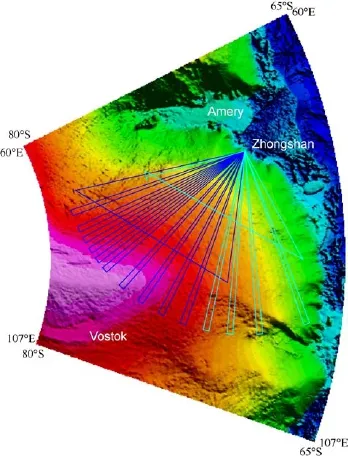
图1 中国第 32次南极科考航空测量计划飞行测线(ICECAP2)Fig.1.The designed survey line of ICECAP2 in 32nd CHINARE
雪鹰601机载航空地球物理平台分为两大部分:GT-2A航空重力测量系统和美国德克萨斯大学奥斯汀分校地球物理研究所(UTIG)开发的ELSA系统(主控测量系统)。GT-2A重力测量系统独立工作,ELSA系统将航空雷达、航空磁力仪以及IMB、温度、照相、激光测距等设备通过 National Instruments(NI) PXI数据采集系统进行集成,通过统一的软件操控界面同时控制各传感器数据采集过程,包括采集参数设置、数据采集过程操控和数据质量监控、数据存储和备份等。为了配合航空地球物理设备协同工作,雪鹰 601飞机上安装了一台 JAVAD DELTA 4通道GPS测量系统,提供飞机位置以及飞行姿态(俯仰和侧转)信息(图2a)。所有4路GPS数据直接合并存储到 GT-2A数据文件中用于航空重力仪数据后期处理; 另分流其中1路GPS数据连接到主控测量系统(ELSA),为航空雷达、航空磁力仪、激光测距仪、照相、温度测量等集成设备提供统一的定位、授时信息。该通道GPS数据以及各传感器探测数据以数据文件形式分别独立存储,需要通过后期处理再将定位信息与各传感器数据连接起来,形成包含物理测点位置信息的地球物理探测数据集,用于进一步的数据处理和数据解释。因此后期数据处理的第一步工作是对 GPS数据进行处理,得到精确的位置信息数据。

图2 极地航空探测系统GPS系统安装位置.a)飞机上GPS天线位置,共4个天线,分别位于机翼以及机身顶部位置;b)机场地面GPS基站,天线及其三脚架置于工作仓顶部Fig.2.Mounting site of GPS in polar airborne survey system.a) positions of GPS in plane,which has four antenna,locating in both wings and the top of the fuselage respectively; b) base GPS station on airport,with its antenna and tripod mounted on the top of working cabin
由于 GPS定位数据在航空测量中至为关键,飞机上另外搭载一台Ashtech ProFlex 800高精度GPS同时工作作为备用。为了配合GT-2A重力测量,需要设置地面参考站记录静态GPS数据用于后续重力数据处理。地面站也采用双机同时工作模式,其中一台数据作为备用。在冰盖机场设置了2台Ashtech ProFlex 800高精度GPS作为静态参考基站(ZGN11和ZGN21)(图2b),要求参考基站GPS至少保证起飞前15 min开机,飞机降落半小时后再关机,在飞机飞行阶段以0.5 s采样率连续观测。
1.2 GPS数据后处理方法
GPS系统的广泛应用极大地提高了地球物理测量定位效率,然而常规单点定位(伪距测量)难以满足航空地球物理定位精度要求,RTK技术的高探测精度仅局限于几十公里范围内,难以满足大范围航空测量的定位要求。精密单点定位技术(Precise Point Positioning,PPP)是继RTK技术后又一次技术革命[5-18]。精密单点定位技术只需要精密轨道和钟差信息(IGS等组织提供的实时或事后数据)[19-22],可在全球任何地点获得全球ITRF框架下一致的厘米级定位精度。另外,PPP采用单向通讯、独立定位的模式,具有不受基线长度限制,作业方便自由,数据处理相对简单、可灵活选用实时处理或事后处理等优点,大大提高了 GNSS精确定位的灵活性,是目前极地航空地球物理考察首选的GPS后处理方法。
PPP后处理主要有两种途径: 在线处理和软件处理两种方式。国际上一些著名研究机构如美国NASA喷气动力实验室(JPL)的APPS[23]、澳大利亚Geoscience Australia的AUSPOS[24]、加拿大Natural Resources Canada的Precise Point Positioning(CSRS-PPP)[25]、美国 NGS 的 OPUS[26]等提供GPS数据在线处理(online)服务,用户通过网页界面(或 FTP)直接提交 GPS测量数据,网站完成处理后以报告形式将处理结果返回用户指定的邮箱。在线处理的优点是对用户要求低,不要求用户必须具有GPS和PPP背景知识,只需要用户按要求的文件格式提交待处理的GPS数据即可。缺点是处理过程和处理方法不透明,用户只能被动接受处理结果。
软件处理是指用户自己安装相应的PPP软件并处理GPS数据。优点是用户全程参与并掌控处理过程。可以按自己的设想和需求选择处理方法、修改参数设置,以期得到最佳处理效果。缺点是要求用户具有较好的测绘知识背景,熟悉GPS和PPP原理。另外需要用户自己提前准备与待处理GPS数据日期对应的精密轨道和钟差数据。PPP数据处理软件主要分为 3类:(1)研究型,主要用于PPP技术研究和开发。如NASA Jet Propulsion Laboratory(JPL)开发的 GIPSY,Massachusetts Institute of Technology(MIT)开发的 GAMIT/GLOBK/TRACK等。(2)商业软件,主要由测绘或GPS厂商随仪器销售的商业软件,如Bernese、Trimble Business Center、RTNet、GrafNav/GrafNet等。(3)开源软件,是指源代码公开的 PPP处理软件,适合于用户学习和二次开发,如日本东京海洋大学Tomoji Takasu开发的RTKLIB[27]、德克萨斯大学奥斯汀分校Applied Research Laboratories开发的GPSTk[28]都是很好的PPP开源软件。
PPP技术的巨大优势使其成为航空测量首选GPS后处理方法,然而PPP应用于极地航空地球物理测量还处于试验探索阶段:(1)极地特殊的地理和自然环境以及航空探测的特殊性决定了极地航空地球物理考察具有自身的特点。极地冰盖探测目前首选的方法组合是大功率深冰探测雷达,与航空磁力仪和航空重力仪组成极地冰盖探测“三剑客”。以后随着探测目标差异和研究对象不同,飞机上搭载的航空探测设备也会有所差异,方法和仪器差异会要求处理技术和处理软件不断地调整和更新。另外,PPP技术应用于极地航空地球物理探测时间较短,处理技术方案还没有完全定型,需要通过大量试验来摸索、优化解决方案。(2)对航空地球物理探测而言,进行PPP处理得到精确的定位数据只是航空地球物理数据处理工作的一小步。由于搭载的探测设备较多,各种方法设备的采样率差异大。如何将GPS后处理结果与各种不同采样率的地球物理数据连接并形成带定位信息的地球物理数据集是最为困难和繁琐的工作,这将直接影响极地航空地球物理数据后处理工作的效率和效果。因此本文主要针对以上两个方面进行方法试验,通过试验对比和软件开发实践,探索和总结极地航空地球物理GPS后处理的优化解决方案。
2 GPS后处理试验结果分析
2.1 ICECAP2数据体系结构和命名规则
雪鹰601一次飞行可以完成约2 000 km的多地球物理方法测量任务,采集得到几十 GB的海量数据。ICECAP2航空测量原始数据是按方法和飞行航次分别存储: 首先按方法建立相应的文件夹,然后在每种方法文件夹中再按飞行航次建立子目录。其中,CMG目录存储重力数据,HICARS2存储航空雷达数据,ELSA目录存储了除重力和雷达数据外所有ELSA得到的数据(包括磁力仪、温度、光学照相、激光测距等),MAG_ZGN为冰盖机场磁力仪日变站数据,MAG_ZHS为中山站磁台站数据(备用)。
由于 GPS定位数据在航空测量中至为关键,无论机载还是地面站都采用双机工作模式,其中一台作为备份(数据备用)。JVD 用于存储机载JAVAD得到的4路GPS数据,PFX用于存储冰盖机场两个静态参考基站的GPS数据,ASH用于存储飞机上备用GPS的测量数据。在每种方法的子目录中按航次命名飞行测线,如F04表示第4次正式飞行测线,TF03表示测试飞行03线(用于仪器状态测试和采集参数试验)。GPS数据后处理主要面向PFX目录的静态基站数据和JVD目录的飞行测量数据。
2.2 参考站位置坐标确定
GT-2A航空重力仪测量重力值高度依赖于GPS系统,除了飞机上不同部位安装的4个GPS天线和 IMB惯导系统测量飞行姿态,还需要在航测过程中同时开启两台静态参考站(reference station)进行连续观测。重力数据后处理时需要导入其中一台参考站 GPS数据进行联合处理。GT-2A航空重力数据后处理工作前,需要提前获得参考站的准确位置坐标并输入到 GT-2A数据处理系统中。
获取参考站准确位置坐标有多种途径,比较简便有效的方法是架设好两台静态参考站后,启动GPS连续观测超过6 h以上,然后处理GPS数据得到参考站准确位置坐标。采用GT-2A数据处理软件推荐的AUSPOS网站在线处理方式处理。AUSPOS是Geoscience Australia提供的免费在线GPS数据处理网站,AUSPOS基于IGS全球网络及其数据产品。AUSPOS只处理静态 GPS数据,并对数据长度、采集时间有限制。用户只需通过网页提交RINEX文件和联系邮箱,不太长的时间内,处理结果报告会返回用户指定的邮箱。
选择 F04和 F09两个航次的 ZGN11和ZGN21参考站GPS数据提交到AUSPOS网站进行坐标解算,从表1可看出,F04测量时间超过14 h,F09测量时间超过11 h,都远超过6 h。表1还显示出AUSPOS用到的南半球15个卫星参考站及其站名,主要分布在南极洲、南大洋和澳大利亚。精密轨道和钟差信息使用的是IGS事后数据(IGS final)。
表2给出的是 ZGN11和 ZGN21参考站用AUSPOS处理得到的精确位置坐标,精度误差精确到毫米,经纬度误差最大6 mm,高程误差稍大,最大在15 mm左右,能够满足航空重力测量参考站的位置坐标定位精度要求。

表1 参考站坐标解算用到的飞行测线以及卫星参考站信息Table 1.The information of flight lines and reference stations in coordinate calculating for static base stations

表2 AUSPOS解算的参考站坐标及其精度误差Table 2.The coordinates and position uncertainty of base stations calculated by AUSPOS
2.3 GPS后处理软件对比与精度评价
PPP处理方法和软件较多,可从静态和动态两个方面进行对比。
2.3.1 静态对比
针对ZGN11参考站F04线静态数据(2015/12/27),尝试使用澳大利亚 AUSPOS、加拿大 Natural Resources Canada的 Precise Point Positioning(CSRS-PPP)在线处理以及 RTKLIB软件处理结果进行对比。
AUSPOS和CSRS-PPP只需要按照规定的格式上传GPS待处理数据(RINEX格式),很快处理报告返回到用户指定的邮箱中,报告中包含处理结果点的经纬度和高程坐标以及精度误差估计。从表3可看出,AUSPOS和Canada PPP在线处理都达到毫米级的处理精度,能够满足航空地球物理处理精度要求。

表3 ZGN11(F04)不同方法坐标解算结果及其精度误差Table 3.The comparison of coordinate calculation results and positional uncertainty in ZGN11(F04) among different processing methods
同时下载安装日本东京海洋大学Tomoji Takasu开发的RTKLIB处理系统。处理前查阅F04线的飞行计划和工作日志,将工作日期、开始/结束时间登记在表中,然后利用工具软件计算出DOY(年积日)和GPS week(GPS周),然后到IGS、NGS、JPL、CODE、MIT等网站下载对应时间的星历和时钟产品备用。RTKLIB处理时输入项为待处理的GPS数据以及对应的星历和时钟数据。RTKLIB数据处理选项较多,其中Setting1选项设置对处理精度影响较大。
1.Positioning Mode: Single(单点 定 位)、DGPS/DGNSS(差分方式)、PPP Kinematic(PPP 动态测量)和PPP Static(PPP静态测量)是4种常用的方式。
2.Frequencies/Filter Type: 滤波类型可以选择Forward、Backward以及Combined,实践证明Forward和Backward方式在两端会需要一段时间收敛(精度误差),Combined可大幅提高定位精度。
3.Rec Dynamics/Earth Tides Correction:固体潮改正 OFF 、Solid、Solid/OTL,建议至少选择Solid,当选择Solid/OTL则需要在Files页面中输入OTL文件(大洋改正)。
4.Elevation Mask: 该设置用于屏蔽低角度卫星。
表3最后一列是RTKLIB采用Combined和5度Elevation Mask的PPP Static处理结果,可以看出采用合适的处理参数RTKLIB具有比在线处理更高的精度。
2.3.2 动态对比
动态测量选择飞往冰盖内陆的F04航次作为试验对象。仍采用RTKLIB软件进行处理。选择Single(单点定位)和PPP Kinematic进行对比。由于 F04测线较长,为了清晰对比细节差异,选择冰盖机场附近的小范围对航迹进行放大显示。图3是F04线用伪距、PPP处理的航迹对比结果。其中图3a是整个飞行测线轮廓,图3b、c是冰盖机场附近包含一段起降航迹的伪距和 PPP处理结果对比图,从图中可看出,在20 m间距的网格中,伪距测量航迹(图3b)虽然能看出飞机运动的轨迹,但航迹点有明显的跳跃。而PPP处理结果(图3c)则非常光滑连贯。对停机坪位置进行局部放大(图3b、c中蓝框)得到图3d和图3e,按照网格间距(网格间距 1 m)对飞机停靠点位置作粗略评估,伪距测量(图3d)的误差至少在6 m以上,飞机回停机坪的轨迹跳跃极大,无法清晰显示飞机运动轨迹,也无法分辨飞机起飞和降落后停靠点的准确位置。PPP处理结果(图3e)则可明显分辨出降落后与起飞前停靠点位置的差异,起飞前精度误差在50 cm以内,返回停靠后精度误差<20 cm,说明PPP处理具有较高的精度,能够满足航空地球物理探测的定位要求,而且随着观测时间长度的增加,收敛性越来越好。
2.4 定位数据与地球物理数据的匹配连接
如2.1节所述,ICECAP2不同方法数据分散在不同的目录文件中,处理后的GPS精确定位数据需要分别和不同的目录下、分散在多个文件中的地球物理探测数据连接才能形成有位置信息的地球物理测量数据集。匹配连接的难点在于:(1)ICECAP2的 GPS数据和不同物探方法的数据分散在不同的目录中,而且每种方法数据的属性信息(如测线号、日期、采集时间、记录顺序号、物理测量值等)分散在多个数据文件中。UTIG约定了非常复杂的文件格式,有些是文本文件,有些是二进制文件,要与GPS点匹配必须同时打开多个文件读取信息。(2)虽然UTIG为了处理方便,定义了ct、xds、bxds等一系列标准文件格式,不同方法采样率差异极大; 而GPS采用统一的0.5 s采样。后处理工作的最大困难就是如何让 0.5 s采样的 GPS数据和采样率差异极大的各种地球物理数据匹配连接。
为了解决 GPS数据与航空物探测量数据匹配连接的难题,在阅读大量仪器说明文档的基础上,开发了相应的极地航空地球物理数据后处理接口软件,用来解决ICECAP2数据后处理工作中GPS数据和各种地球物理测量数据连接的问题。软件设计思路如下。
1.设计 GPS文件输入接口,用以读取经过PPP处理的GPS数据文件。接口支持文本文件或GPS标准格式(如RINEX格式)。
2.设计物探数据文件输入接口,能够同时打开bxds数据文件以及ct、xds等配置文件。这一过程采用智能匹配,通过 UTIG标准约定关键字智能识别仪器型号和采集参数。
3.匹配连接 GPS和物探方法数据,输出带定位信息的地球物理数据文件。这一过程相对复杂,针对不同的物理方法采用不同处理和输出方法。
航空磁力仪、温度、激光测距仪等一个测点只有一个物理数据。首先从物理测点的多个配置文件中找到测点对应的采集时间,然后搜索 GPS数据文件,找到与该点时间最近的 6个样点,采用插值处理得到物理点对应的经纬度坐标。最后将测线号、测点顺序号、日期、采集时间、经纬度、高程和物理测量值等列按测点顺序以文本文件输出。

图3 F04线不同方法处理结果对比.a) F04线飞行航迹; b)—e)冰盖机场附近局部放大航迹(图b、c分别是伪距和PPP处理的航迹;图d、e是停机坪位置放大图,分别对应图b和图c中的蓝框部分)Fig.3.Comparison of processing results in flight line F04.a) flight track of line F04; b)—e) zoom-in track map from Fig.a;b),c) track maps of pseudo-range and PPP respectively; d),e) zoomed map of parking apron,which limited by the blue box in Fig.b and Fig.c
相机是每个测点生成一张照片(图像文件)。采用磁力仪等设备得到测点处的经纬度坐标。然后将测线号、测点顺序号、日期、采集时间、经纬度、高程、相片图像文件的路径及文件名等以文本文件输出。其中相片路径及文件名提供一个地址索引,用于引导相关软件直接读取照片图像。
与磁力仪、重力仪等一个测点只有一个物理数据不同,航空雷达每一测点对应3 439样点数据(从浅到深),雷达数据还需要进行滤波、偏移、叠加等处理来突出有效信号并压制干扰以及可视化等。因此采用标准格式输出有利于导入到其他专业软件进行进一步处理。为此,选择地震、雷达软件常用的SEG Y格式作为航空雷达数据输出的标准格式。首先从物理测点(道)的多个配置文件中将测线号、日期等信息写入SEG Y卷头对应的位置,然后从输入文件中找到测点对应的采集时间,搜索GPS数据文件,通过插值处理得到该道集的经纬度坐标,并写入到对应道头的坐标信息字节中。再从雷达数据文件中复制该道数据(3 439样点数据)放在道头后面。依次重复写入道头坐标信息、复制道数据,直至将所有道都写入到SEG Y文件中。输出的SEG Y文件包含完整的设备信息、采集参数、测点(记录道)坐标信息以及道数据,可以使用其他软件进行进一步处理和解释。
3 结论和讨论
GPS数据后处理是航空地球物理数据后处理过程中首要和关键性的环节,直接决定了测量数据的位置精度。ICECAP2是中国首次开展的极区大范围航空地球物理科学考察,机载设备众多,多设备协同工作成为后期数据处理难点所在。本课题针对现状和目标需求,通过试验对比评价不同GPS数据处理方法效果,并开发了相应的处理软件,用以解决GPS数据和多种地球物理数据的匹配连接问题。主要结论如下。
1.试验结果表明: 无论就野外施工还是后期资料处理而言,PPP都是极地航空地球物理GPS数据处理最理想的方法。在线处理和软件处理都能满足极地航空地球物理测量的精度要求,用软件自处理精度更高。可以根据需要选择合适的处理方法或处理软件。
2.GPS数据和地球物理测量数据连接是极地航空地球物理数据后处理工作中难度较大且繁琐的工作,通过开发相应的处理转换接口软件,可大大减少工作量。通过标准化的输出接口,扩展了数据的通用性,便于进一步处理和解释。
由于这是首次处理中国极地航空地球物理数据,碰到了很多困难和障碍,只能通过大量试验摸索经验,寻找合适的方案和技术。在试验基础上,对 ICECAP2项目GPS后处理过程和方法进行总结,GPS数据后处理过程可分为两个关键步骤: GPS数据的 PPP处理(包括静态和动态处理)以及GPS数据和地球物理数据的匹配连接。PPP处理是得到精确位置坐标的基础,GPS数据和地球物理数据的匹配连接是极地航空地球物理数据后处理工作的关键性步骤。
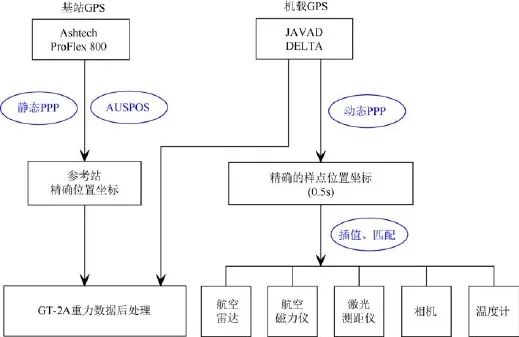
图4 极地航空地球物理GPS后处理工作流程图Fig.4.Flow diagram of GPS post processing in polar airborne geophysical expedition
根据后处理过程和方法总结形成初步的工作流程(图4)。流程图只是针对ICECAP2项目所搭载的几种设备后处理工作流程和处理方法进行概括,列出关键步骤以及所使用的处理方法。未来根据工作需要可能会增加更多的探测设备,工作流程也需要不断地完善和补充,但总体处理思路和框架的搭建,对后续工作具有指导意义。
试验前期大量数据处理工作都是手工完成,工作量极大。为了提高效率,减小数据处理的工作量,迫使我们开发了相应的数据处理软件,并极大地节省了人力、提高了效率。但目前软件功能还相对单一(只针对 GPS数据和地球物理数据的匹配连接问题)。希望在未来的工作中不断补充、完善和扩展功能,并最终推出集GPS数据和多地球物理数据处理一体化的平台,形成多功能、可扩充、标准化的中国极地航空地球物理数据处理解决方案。
致谢项目实施过程中得到中国第 32次南极考察队全体队员,特别是固定翼飞机作业队张体军处长及全体同仁的支持和帮助,也得到美国UTIG的Jamin Greenbaum,Laura Lindzey,以及CMG公司的 Helen Tuckett博士的热心帮助,在此一并表示感谢。
1 Alley R B,Clark P U,Huybrechts P,et al.Ice-sheet and Sea-level Changes[J].Science,2005,310(5747): 456—460.
2 Budd W F,Jacka T H.A review of ice rheology for ice sheet modelling[J].Cold Regions Science and Technology,1989,16(2): 107—144.
3 Plewes L A,Hubbard B.A review of the use of radio-echo sounding in glaciology[J].Progress in Physical Geography,2001,25(2):203—236.
4 Fretwell P,Pritchard H D,Vaughan D G,et al.Bedmap2: improved ice bed,surface and thickness datasets for Antarctica[J].The Cryosphere,2013,7(1): 375—393.
5 Zumberge J F,Heflin M B,Jefferson D C,et al.Precise point positioning for the efficient and robust analysis of GPS data from large networks[J].Journal of Geophysical Research: Solid Earth,1997,102(B3): 5005—5017.
6 李征航,黄劲松.GPS测量与数据处理[M].2版.武汉: 武汉大学出版社,2010.
7 李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉: 武汉大学出版社,2009.
8 赵兴旺,王胜利,刘超.GNSS精密单点定位理论与方法[M].合肥: 中国科学技术大学出版社,2015.
9 张小红,刘经南,Forsberg R.亚分米级精度的动态单点定位在航空测量中的应用[C]//中国全球定位系统技术应用协会第八次年会论文集.北京: 中国全球定位系统技术应用协会,2005.
10 张小红.动态精度单点定位(PPP)的精度分析[J].全球定位系统,2006,31(1): 7—11,22.
11 Ge M,Gendt G,Rothacher M,et al.Resolution of GPS carrier-phase ambiguities in Precise Point Positioning(PPP) with daily observations[J].Journal of Geodesy,2008,82(7): 389—399.
12 罗海英,李强,于海亮.基于Waypoint8的GPS精密单点定位研究[J].全球定位系统,2009,34(3): 21—25.
13 邱中军,陈景平,房颖,等.精密单点定位及其精度分析[J].测绘工程,2011,20(6): 35—37.
14 范士杰,刘焱雄,张健.PPP与GAMIT/TRACK在地震监测中的应用[J].测绘科学,2013,38(2): 184—186.
15 张建龙,徐爱功,张兆南,等.RTKLIB软件静态精密单点定位精度测试与分析[J].全球定位系统,2014,39(1): 37—41.
16 丁慧君,罗端,卢兵.基于RTKLIB的精密单点定位研究[J].城市勘测,2014,(5): 22—25.
17 Héroux P,Kouba J.GPS precise point positioning using IGS orbit products[J].Physics and Chemistry of the Earth,Part A: Solid Earth and Geodesy,2001,26(6—8): 573—578.
18 Gao Y,Chen K Z.Performance analysis of precise point positioning using Rea-time orbit and clock products[J].Journal of Global Positioning Systems,2004,3(1—2): 95—100.
19 Teferle F N,Orliac E J,Bingley R M.An assessment of Bernese GPS software precise point positioning using IGS final products for global site velocities[J].GPS Solutions,2007,11(3): 205—213.
20 Kouba J,Héroux P.Precise point positioning using IGS orbit and clock products[J].GPS Solutions,2001,5(2): 12—28.
21 Bertiger W,Desai S D,Haines B,et al.Single receiver phase ambiguity resolution with GPS data[J].Journal of Geodesy,2010,84(5):327—337.
22 李辉,李建文,朱建华,等.星历精度对动态GPS精密单点定位的精度影响分析[J].测绘科学,2012,37(3): 186—187.
23 APPS.Free online GPS data processing from NASA Jet Propulsion Laboratory[EB/OL].http://apps.gdgps.net/.
24 AUSPOS.Free online GPS data processing from Geoscience Australia[EB/OL].http://www.ga.gov.au/scientific-topics/positioningnavigation/geodesy/auspos.
25 Precise Point Positioning,free online GPS data processing from Natural Resources Canada[EB/OL].(2016-12-13).http://www.nrcan.gc.ca/earth-sciences/geomatics/geodetic-refernce-systems/tools-applications/10925#ppp.
26 OPUS.OPUS: Online Positioning User Service[EB/OL].(2017-10-10).https://www.ngs.noaa.gov/OPUS/.
27 Takasu T,Yasuda A.Evaluation of RTK-GPS Performance with Low-cost Single-frequency GPS Receivers[C]//International Symposium on GPS/GNSS 2008.Tokyo,Japan: Tokyo International Exchange Center,2008.
28 GPSTk web site[EB/OL].(2017-10-04).http://www.gpstk.org/bin/view/Documentation/WebHome.
猜你喜欢
小哥白尼(趣味科学)(2022年5期)2022-08-15
奥秘(2022年6期)2022-07-02
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
水泵技术(2021年3期)2021-08-14
今日农业(2020年20期)2020-12-15
能源(2018年10期)2018-12-08
小学阅读指南·低年级版(2017年1期)2017-03-13
能源(2016年10期)2016-02-28
中国惯性技术学报(2015年1期)2015-12-19