大截面近间距双通道管廊矩形顶管施工技术
2018-03-06 02:56季向明
建筑施工 2018年10期
季向明
中亿丰隧道工程股份有限公司 江苏 苏州 215131
1 工程概况
1.1 项目概况
背景工程位于苏州太湖新城友翔路与龙翔路交叉处,为三仓断面形式,其顶管段为友翔路与龙翔路交叉口的正下面,为了在管廊施工的同时不影响龙翔路交通,本段管廊工程采用了双通道矩形顶管法进行施工。顶管工作井位于友翔路上,接收井位于龙翔路西侧,建成后,友翔路与龙翔路管廊将顺利贯通,形成规划中的地下综合管廊的片区(图1)。

图1 现场平面工况
顶管机由工作井始发,穿越龙翔路至接收井,采用2条顶管并行布置,通道全长80.44 m,间距为0.6 m(图2)。
1.2 工作井概况
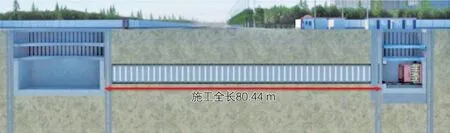
图2 整体顶管示意
工作井长13.9 m,宽10 m,基坑深15.26 m(图3),顶管机进洞口上部标高为-8.21 m,工作井采用单排φ850 mm@600 mm三轴水泥土搅拌桩,有效长度至-26 m形成止水帷幕,内侧采用φ1 000 mm@1 200 mm灌注桩,灌入深度至-31m进行工作井的竖向围护,三轴搅拌桩与灌注桩之间@1 200 mm压密注浆;水平支撑采用2道混凝土支撑及2道钢支撑进行围护,在顶管机出洞洞口处增加双排φ850 mm@600 mm三轴水泥土搅拌桩,加固深度至-17 m,并在最内侧三轴水泥土搅拌桩内插700 mm×300 mm×13 mm×24 mm型钢,密插至-17.5 m。
1.3 接收井概况
接收井长22.85 m,宽21.50 m,基坑深16.10 m(图4)。接收井采用单排φ850 mm@600 mm三轴水泥土搅拌桩止水帷幕,深度至-16.04 m,φ1 000 mm@1 200 mm灌注桩支护深度至-33.60 m;进洞口处三轴水泥土搅拌桩内插700 mm×300 mm×13 mm×24 mm型钢,密插至-17.50 m。
1.4 水文地质概况
1)地质情况。本工程顶管顶进区间主要穿越④层粉质黏土、⑤层粉质黏土夹粉土。
2)地下水分布。第1种类型为孔隙潜水,赋存于上部填土、粉质黏土中,水量不大,其补给来源于大气降水的垂直渗入、河流的侧向补给,排泄以蒸发为主。潜水水位埋深在0.15~3.00 m,标高在1.44~1.83 m,水量较少,年变幅1.00 m左右。第2种类型为微承压水,主要赋存于⑤2层粉土夹粉质黏土层中,富水性中等,主要接受与其相通的含水层的侧向补给及上游潜水的越流补给,排泄主要为人工开采和向下游的侧向径流,水头升降受季节性变化影响。承压水水位标高在0.32~0.47 m,水量一般。

图3 工作井效果图
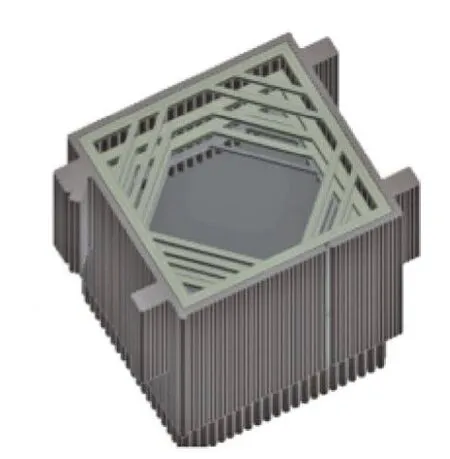
图4 接收井结构示意
1.5 管线概况
1)污水管线:污水管线为混凝土制作管道,其直径为800 mm,底部距离通道顶部约2 m。在通道顶进过程中,可在其位置(顶进方向)前后3 m范围内降低0.01 MPa前方土压力,同时加大此范围内的路面及污水管线的监测频率。
2)高压线:高压线距离地面约8 m。在整个施工过程中,无任何吊装施工任务在此范围,仅有进出车辆从此通过,车辆(包括运输物品)高度不超过5 m。
1.6 顶管机概况
本工程采用了JD5450×4500型土压平衡矩形顶管机,顶管机由53 t的前壳体、30 t的后壳体以及2个10 t的螺旋出土机组成。顶管机前段安装1大4小组合刀盘进行土体切削,总切削率为91.2%。顶管机后顶系统由16个行程3.5 m的千斤顶组成,运行最大油压为31.5 MPa(图5)。
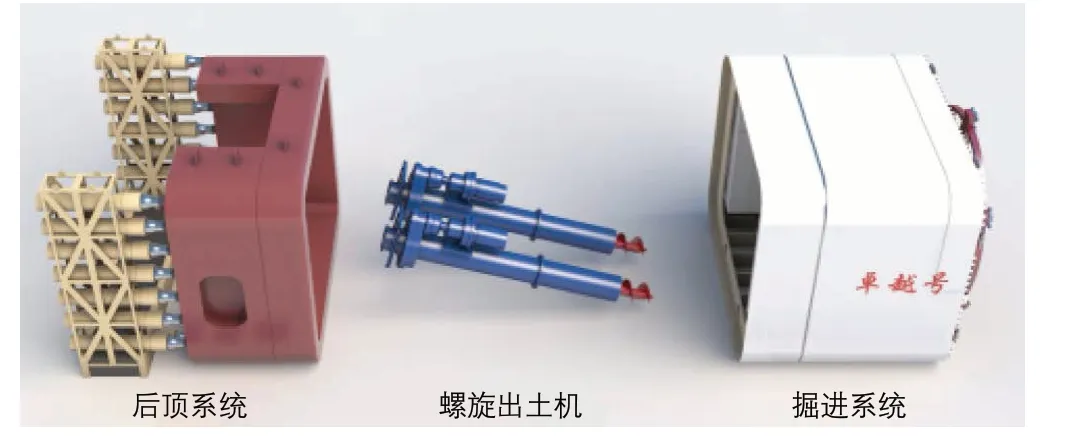
图5 顶管机效果图
2 施工重点、难点分析
2.1 顶管始发与接收的控制
顶管机始发与接收顶进时,由于顶管机与门洞口存在施工间隙,故有可能导致原状土体内的地下水连带泥浆涌入至始发井内,造成土体失稳塌陷及地面塌陷等安全事故。所以控制顶管机出洞及进洞是本工程施工的关键工序之一。
2.2 双排、近间距顶管顶进
本项目顶管工程为双排并行顶管,2条顶管之间净距只有0.6 m,双通道顶管分左右先后顶进施工,由于左线施工对原状土体造成了一定的扰动,在顶进第2条顶管时,2条顶管之间的土体被进一步挤密形成被动土压力。中间层的土压力将产生两部分影响,一是对已经贯通的左线管线形成侧压力,如果不进行控制,将导致已建左线通道偏移,甚至是破裂;二是导致右线顶进时顶管机向外侧偏移,由于土体挤压密实,无法通过油缸及注浆进行纠偏,最终导致顶管机偏移且无法进入预先设定的接收洞口。所以,在二次顶进过程中如何控制侧向土压平衡、降低后施工顶管对已完成左线的管道管节造成的影响是右线顶进施工的控制重点,也是本工程能否实施完成的关键[1-4]。
2.3 顶管姿态控制精度高
顶管机与出洞门洞框间距为10 cm,在顶管顶进过程中,需要严格控制顶管顶进方向与设计轴线的偏差,如何控制顶管的顶进方向及姿态是保证顶管精确出洞的核心和关键。
2.4 下坡顶进施工控制
顶管始发井洞口标高为-9.41 m,接收井接收洞口标高为-9.91 m,高差0.50 m,顶管下坡坡度为0.62%,在顶管顶进过程中,在控制顶管姿态的同时还需要满足该坡度顶进,控制不好将导致顶管机无法进洞接收(图6、图7)。
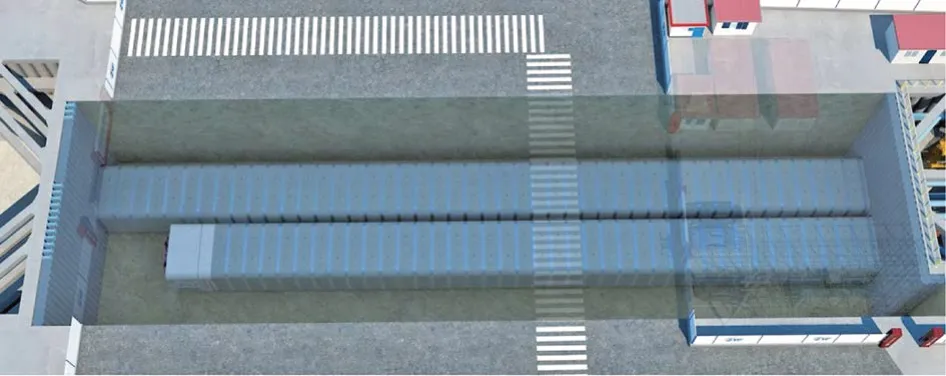
图6 双排并行顶进示意

图7 顶管机坡度示意
3 顶管施工控制措施
3.1 顶管始发与接收控制措施
3.1.1 钢压板橡胶止水帘布的安装
由于洞圈与管节间存在着10 cm的建筑空隙,在顶管进洞及正常顶进过程中极易出现外部土体及触壁泥浆涌入始发井内的严重质量安全事故。为防止此类事故发生,施工前在洞圈上安装帘布橡胶板密封洞圈(图8),橡胶板采用厚12 mm钢压板控制橡胶带的柔性变形,压板的螺栓孔采用腰子孔形式,以利于顶进过程中可随管节位置的变动而随时调节,保证帘布橡胶板的密封性能。为了防止顶管机在进洞口时刮破橡胶止水带,在顶管机机头位置设置导向钢筋,待机头完全进入洞口之后再进行人工割除处理(图9)。

图8 止水帘布、钢压板

图9 机头四角设置导向筋
3.1.2 发射架及顶管机的安装
基座定位后必须稳固、正确,在顶进中承受各种负载后不位移、不变形、不沉降。
发射架共分为3块,在井内拼装完成,通过高强螺栓连接成整体,基座上的2根轨道必须平行、等高。满足轴线等条件后进行加固(图10)。
为保证顶管出洞段的轴线控制,顶管机吊下井后,需对顶管机进行精确定位,使顶管机出发轴线与设计轴线相符。
在顶管机准确定位后,必须进行反复调试,在确定顶管机运转正常后,再进行顶管出洞和正常顶进工作。
3.1.3 洞门水平探孔与仓前压力填充
洞门破除前,对洞口灌注桩里侧SWM工法桩成型止水效果通过断面探孔的方式,观察、判断灌注桩凿除后,SWM工法桩掌子面的效果。钻孔过程中注意避免SWM工法桩内的型钢(图11)。

图10 发射机及后顶系统安装
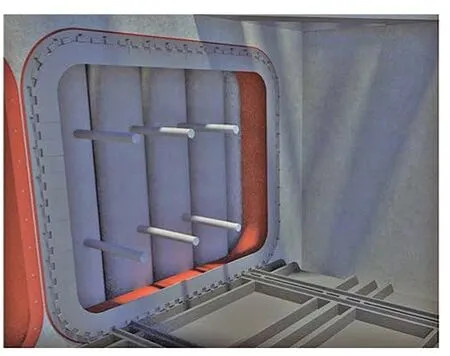
图11 水平探孔
洞门采用人工风镐按“纵向分段,竖向分层”的原则破除。破除完成后将洞口余渣快速清除,帘布止水压板顺直后将机头快速顶进型钢处,刀尖距型钢面5 cm。顶进过程中保证机头铲齿对止水帘布板的无伤害,这是顶管施工中的第一步环节。型钢拔除前务必完成机头土仓内不小于满仓2/3的泥浆填充,保证型钢拔除时前方土体不失稳。避免洞口因型钢的拔除造成沉降。型钢拔出后的型钢缝应立即对其进行注浆填充,上部表面用混凝土压实。避免后期明水渗入顶管顶部带动土体流失造成二次沉降。
3.2 双排、近间距顶管顶进
本项目顶管工程为双排并行顶管,2条顶管之间净距只有0.6 m,双通道顶管分左右先后顶进施工,由于左线施工对土体造成了一定的扰动,在顶进第2条顶管时,两顶管之间的土体被进一步挤密形成被动土压力,中间土体被挤密,导致通道两侧土体密实度不一致,给第2条通道的顶进施工带来了侧向土压不平衡的施工环境。
1)中间层集聚的土压力对已经贯通的左线管线形成侧压力,如果不进行控制,将导致已建左线通道偏移,甚至是破裂。
2)中间层集聚的土压力的增加会导致右线顶进时顶管机向外侧偏移,由于中间层挤压密实,无法通过油缸及再注浆进行纠偏,最终导致顶管机偏移无法进入预先设定的接收洞口。
3)顶进过程中的土压不平衡造成了机头顶进姿态的不稳定,控制难度增大。
通过分析,为了减弱被挤密土体对2条顶管产生的侧向压力的影响,给顶管机机头靠近已完成通道的一面进行设备改造——增加1道取土装置。在机头增加1道取土装置后,顶管机在顶进过程中,可将内侧挤压土进行扩大取土,让中间土层先形成一条施工间隙,从而使中间被动挤压土改变为主动释压土,抵消土体对机头和成型通道的挤压力。
3.3 顶管施工姿态控制
本工程矩形顶管机方向分为“两段一纠偏”,顶管机姿态测量采用“两段两姿态、五位一体”的方法,即顶管机内5个位置的控制点,反映出顶管机前、后段的姿态等情况。
3.3.1 测量控制点的引测
施工控制点从基坑外侧地面引测至基坑内。井内测量控制点分别位于井内后靠位置及结构内边墙体上。
3.3.2 顶管机内靶台的安装
顶管机内靶台的安装分为前、后纠偏段。其中纠偏前段安装3个靶台,靠近顶管机胸板左右位置各安装1个,前纠偏段尾部安装1个。纠偏后段安装2个靶台,可分别安装在后纠偏段的前、后位置。为避免靶台被施工现场遮挡,靶台安装在顶管机中间上部位置。
3.3.3 姿态的测量
姿态的测量主要通过全站仪,对顶管机机头靶台三维坐标的测量,再根据顶管机(管节)与内部靶台的空间位置关系、靶台与设计顶进轴线的关系,确定顶管机(管节)的姿态(趋势)。
通过全站仪进行五位一体的测量控制,计算出顶管机前壳体姿态偏位角、旋转角。主要测量计算得出数据:
1)纠偏前段姿态的测量主要包含3个方面内容:顶管机轴线的偏差、顶管机高程的偏差、顶管机的旋转角度。
2)纠偏后段姿态的测量主要包含2个方面内容:顶管机轴线的偏差、顶管机高程的偏差。
3)顶管机整体的顶进里程。
通过测量出靶台的空间三维坐标即得出相对应的顶管机的空间三维坐标,再将顶管机的空间三维坐标与设计的轴线相比较,得出空间中顶管机与设计轴线的偏差。顶管机姿态数据控制应做到“实时监控、勤测勤纠”。测量数据需实时转化为顶管机的具体姿态,以指导顶管机施工。为此,普通的计算方法在时间上不满足实时顶进的需求,而数据计算一般采用编程的方法,可快速计算出顶管机的姿态。考虑到手机APP的方便及界面程序的简易,本工程采用卡西欧5800P及java编程(编译成APP)手机APP程序进行姿态计算,测量的过程即为姿态计算的过程。测量员通过计算结果得出的顶管机的偏移数据可反映至监控室,从而对顶管机进行实时的纠偏控制处理(图12)。

图12 顶管机测量示意
3.3.4 侧向纠偏的控制
对施工过程中的管节进行侧向水平测量,画出管节的趋势线路图,计算出实际顶进曲线和设计轴线的偏差量,利用纠偏油缸进行弥补辅助纠偏。纠偏量不宜过大,应控制在2 cm之内。纠偏后趋势与顶进管节设计趋势同步对应,缓慢回收。
3.3.5 外力辅助纠偏措施
机头内部预先设置8个泥垫装置,孔径50 mm。当顶进过程中设备发生位移、旋转、偏差等最不利工况,前面措施不能满足纠偏要求时,利用高压泥泵通过预留泥垫装置向机头外侧注入配合比适中的混合土,给机头一个反向的推力,使机头回位到设计轴线中(图13)。

图13 机头内泥垫装置示意
3.4 下坡顶进的控制措施
3.4.1 发射架起始坡度控制
发射架搭设时,使发射架的搭设起始坡度与管道设计坡度(0.62%)相一致,并使机头下行开始顶进时就形成初始坡度。
3.4.2 千斤顶放压顶进控制措施
顶管机进入加固区后,通过控制后端千斤顶,将后顶系统的下部千斤顶进行放压顶进,从而避免机头在加固区产生上浮趋势。在正常顶进时,液态浆注浆时控制压力始终小于前方土体顶进土压力,避免浆液进入前方土仓造成螺旋机打滑不出泥现象,导致机头整体上浮。
4 结语
通过多种技术措施的控制与调整,顶管左、右线顺利贯通,顶管机进洞偏差均控制在1 cm以内,顺利进洞进行接收(图14、图15)。采用顶管法进行综合管廊过道路施工,成功解决了管廊施工与交通通行的矛盾,也为后续类似工程提供了借鉴。

图14 左线顶进接收
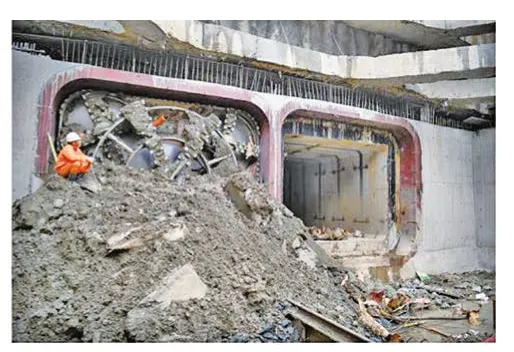
图15 右线顶进接收
猜你喜欢
河北水利(2022年4期)2022-05-17
现代仪器与医疗(2021年5期)2021-12-02
建材发展导向(2021年13期)2021-07-28
科海故事博览(2021年27期)2021-01-02
科学与财富(2018年10期)2018-06-09
中国铸造装备与技术(2017年6期)2018-01-22
建筑与装饰(2016年7期)2016-10-19
中国塑料(2015年6期)2015-11-13
中国水利(2015年12期)2015-02-28
四川党的建设(2014年9期)2014-08-23