一种多层特征融合的人脸检测方法
2018-03-12 01:45王成济罗志明钟准李绍滋
智能系统学报 2018年1期
王成济,罗志明,钟准,李绍滋
(1. 厦门大学 智能科学与技术系,福建 厦门 361005; 2. 厦门大学 福建省类脑计算技术及应用重点实验室,福建 厦门361005)
人脸识别技术作为智能视频分析的一个关键环节,在视频监控、网上追逃、银行身份验证等方面有着广泛的应用。人脸检测是人脸识别的基础关键环节之一,在智能相机、人机交互等领域也有着广泛的应用。人脸检测是在输入图像中判断是否存在人脸,同时确定人脸的具体大小、位置和姿态的过程。作为早期计算机视觉的应用之一,人脸检测的相关研究可以追溯到1970年[1]。由于真实场景中人脸的复杂性和背景的多样性,人脸检测技术在复杂场景下还存在着许多挑战。
近年来深度卷积神经网络(CNN)使图像识别、目标检测等计算机视觉任务取得长足进步[2-4]。目标检测问题可以看作两个子问题的组合:目标定位问题和目标分类问题。目标定位问题主要确定物体在图像中的具体位置,目标分类问题将确定目标相应的类别。受ren等[4]提出的区域候选框提取网络(region proposal network, RPN)的启发,Huang等[5]和Yu等[6]认为用于解决图像分割问题的框架同样适用于目标检测问题,它们对于图片中的每一个像素点都判断该像素是否属于人脸区域以及当属于人脸区域时相对于人脸区域边界坐标的偏移量(当前像素点与人脸边界在空间坐标上的相对偏移)。UnitBox[6]将用于图像分类的VGG16[7]网络改造为全卷积神经网络(FCN)[8],在pool4特征层的基础上预测像素点的分类得分,在pool5特征层的基础上预测人脸区域内像素点坐标的偏移量。UnitBox[6]首次使用重叠率评价人脸区域内像素点坐标偏移量回归的好坏,重叠率损失函数将人脸区域内每个像素点的上下左右4个偏移量当作一个整体,利用了这4个偏移量之间的关联性。Yu[6]认为用于预测人脸区域内像素点坐标偏移量的特征需要比预测人脸分类的特征有更大的感受野,所以他们仅利用了pool5层特征预测坐标偏移量,在预测每一个像素点的分类得分时UnitBox使用椭圆形的人脸区域的标注,在测试时在分类得到的得分图上做椭圆检测,然后提取检测出的椭圆的中心点对应的矩形框作为最终检测结果。在实验中我们发现在使用椭圆标注训练得到的得分图像无法拟合出标准的椭圆,尤其当多个人脸区域有重叠时,无法分开多个人脸区域。实验中还发现,使用pool5层的特征虽然有很好的感受野但在处理小人脸时会因为感受野过大造成小人脸区域内坐标偏移量回归不准确,影响最终检测结果。
基于以上工作,本文使用矩形的人脸区域标注,摈弃了UnitBox[6]后处理中的椭圆检测的部分, 转而使用非极大值抑制算法过滤大量重复的矩形框;当两个人脸区域重叠率超过非极大值抑制算法的阈值时,以前的非极大值抑制算法只能够保留一个人脸会造成漏检,为了避免这个问题,本文根据矩形框的重叠率对预测矩形框的得分加权降低非最大矩形框的置信度,然后使用置信度阈值来过滤矩形框,这样当两个人脸检测出的矩形框重叠率大于制定阈值时也不会直接过滤掉, 避免漏检。在特征的感受野过大的问题上,本文重新探索了不同卷积层在人脸检测任务中的重要性,同比较不同大小感受野的特征组合方法对准确率的影响, 发现结合pool4层的特征和pool5层的特征能同时处理大人脸和小人脸。
1 相关工作
人脸检测大致可以分为3个部分:候选框提取、图像分类、边框坐标回归。传统方法采用滑动窗口提取候选框,然后使用Harr_[9]、SIFT[10]、HOG[11]等手工提取的特征结合SVM[12]、boosting[9,13]等机器学习算法对候选框进行分类。这种穷举的策略虽然包含了目标所有可能出现的位置,但是缺点也是明显的:1)基于滑动窗口的区域选择策略没有针对性,时间复杂度高,窗口冗余;2)手工设计的特征对于多样性的变化并没有很好的鲁棒性。
为了解决滑动窗口计算复杂度高的问题,出现了利用图像中的纹理、边缘、颜色等信息的基于区域候选框的解决方案[14-15],这种方案可以保证在选取较少窗口的情况下保持较高的召回率。这大大降低了后续操作的时间复杂度,并且获取的候选窗口要比滑动窗口的质量更高。Ross B. Girshick等[2]提出的RCNN框架,使得目标检测的准确率取得极大提升,并开启了基于深度学习目标检测的热潮。Fast RCNN[3]方法利用特征图提取候选框极大地降低了基于深度学习目标检测方法的时间复杂度。Faster R-CNN[4]方法更进一步,首次提出了自动提取图片中区域候选框的RPN网络,并将传统的提取候选框的操作集成到特征学习网络中,使得目标检测问题可以达到end-to-end。CascadeCNN[16]使用3个独立的卷积神经网络分级过滤候选框。DDFD[17]首次将全卷积神经网络[8]成功地应用于人脸检测问题中。
2014年J. Long等[8]提出全卷积神经网络(fully convolution network, FCN)并成功地应用在图像分割任务中,直到现在FCN依然是图像分割的主流框架。全卷积神经网络(FCN)与卷积神经网络(convolution neural network, CNN)的主要不同是FCN将CNN中的全连接层通过卷积层实现,并使用反卷积操作得到与输入同样大小的输出,因此网络的输出由原始CNN的关于整张图像上的分类结果变成了FCN中关于整张图像的像素级的分类,也就是输入图像的每一个像素点都对应有一个分类的输出结果。FCN是直接对像素点进行操作,在经过一系列的卷积和反卷积的操作后得到与原始输入图像同样大小的中间结果,最后经过softmax操作输出类别概率。FCN的主要网络是在现有的AlexNet[18]、VGGNet[7]和ResNet[19]等用于图像分类的CNN网络模型上增加反卷积操作来实现的。DenseBox[5]在文献[15]基础上将人脸区域坐标回归问题视为在特征图的每一个像素位置预测这个像素坐标相对于人脸区域边界坐标的偏移量的问题,然后使用类似图像分割的方法来处理,并采用了l2损失函数作为坐标回归的损失函数,UnitBox[6]认为同一个像素的4个偏移量之间是相互关联的,为了体现这种关联性提出了使用重叠率损失函数,通过不断优化预测人脸矩形框与真实人脸矩形框的重叠率,使得最终预测的矩形框与真实矩形框的重叠率不断增加。
2 算法框架
本节主要介绍整体算法流程,如图1所示。在训练阶段有3个输入:RGB的训练图片、单通道的区域像素分类标签和四通道的人脸区域内像素点坐标偏移标签。经过FCN网络后有两个输出:第一个是像素级分类得分的概率图,判断该像素点是否属于某个人脸区域;另一个是1个4通道的像素点坐标偏移图,4通道的像素点坐标偏移图中的4个通道分别对应每一个像素值与离它最近的人脸区域的上下左右4个边框坐标的偏移量。最后使用交叉熵损失函数和重叠率损失函数指导网络训练,我们使用联合训练。标签形式见2.1节,网络的具体细节见2.2节。每一个像素都需要计算交叉熵损失,但仅仅对包含在标注的人脸区域内的像素点计算重叠率损失。在测试阶段输入图片经过训练好的FCN模型输出每一个像素点的分类得分和人脸区域内像素点坐标偏移量,对每一个得分大于阈值的像素点我们从对应四通道坐标偏移图取出该像素点相对于离它最近的人脸区域边界坐标的偏移量,假设像素点 p(xi,yi)的预测得分si大于阈值且预测的坐标偏移为则像素点 p(xi,yi)的预测矩形框坐标为使用 NMS算法过滤重复检测的矩形框,得到最终检测结果。
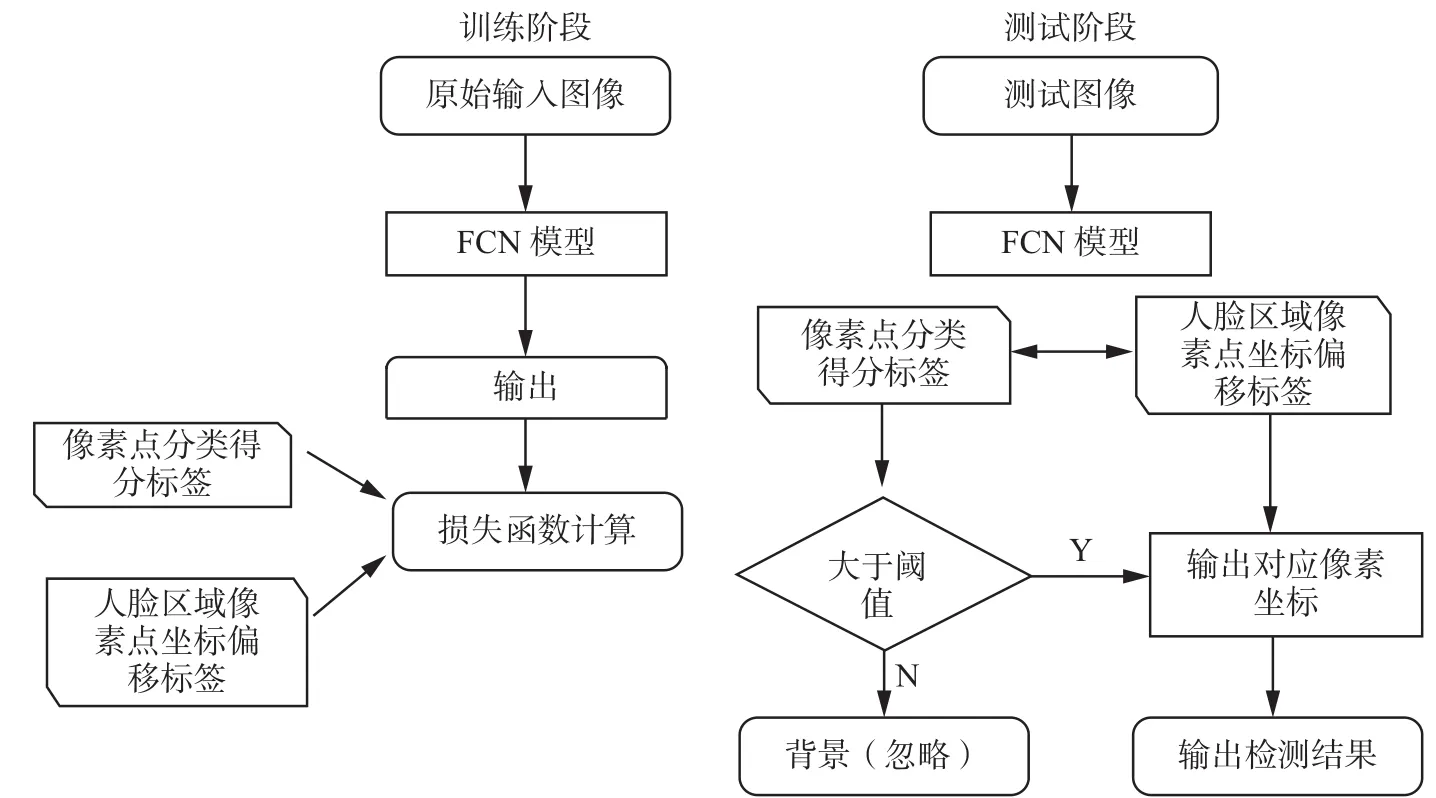
图 1 算法流程Fig. 1 Algorithm procedure
2.1 训练标签的制作
训练标签如图2所示。
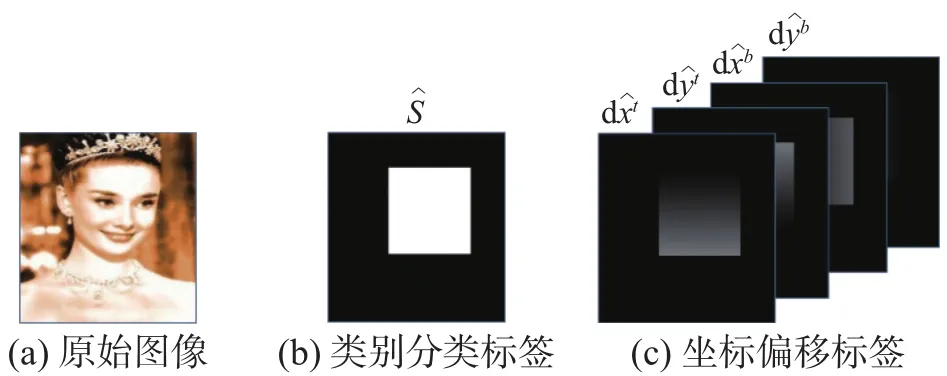
图 2 训练标签Fig. 2 Ground truth
对于每一张训练的图像,将图像上每一个人脸标注的矩形区域,以1填充,其他区域填充0,作为每一个像素点的人脸置信度得分。假设像素点p(xi,yi)包含在某个人脸区域中,假设这个人脸区域左上角坐标为pt(xt,yt),右下角坐标为pb(xb,yb),则像素 点 p(xi,yi)的标签向量形式:
2.2 多级特征串联
网络模型结构如图3所示,使用的是去掉了全连接层和softmax层的VGG16网络[7]作为模型共享的特征提取网络。在共享的特征提取网络的基础上,在pool4特征层后添加了两个独立的卷积层sc_conv4和bbx_conv4,每一个卷积层包括32个3×3的卷积核,并保持特征图分辨率大小不变,在pool5特征层后同样添加了含有32个3×3的卷积核的卷积层bbx_conv5。因为pool4特征层的分辨率是输入的1/16,为了得到与输入同样大小的输出,对sc_conv4和bbx_conv4分别做了步长为16的反卷积操作,将sc_conv4和bbx_conv4两个特征层的分辨率放大16倍并保持特征维度不变,对bbx_conv5使用反卷积放大32倍使分辨率与输入相同。sc_conv4层输出的特征首先被放大16倍,输入到含有32个3×3卷积核的卷积层和1个卷积核大小为1×1的卷积层,最后输入到sigmoid激活函数得到每一个像素点的类别分类得分。为了得到预测的4维坐标偏移图,将反卷积后的bbx_conv4和bbx_conv5两个特征层串联后经过连续两层含有32个3×3卷积核的卷积层得到4维人脸区域内的坐标偏移图。
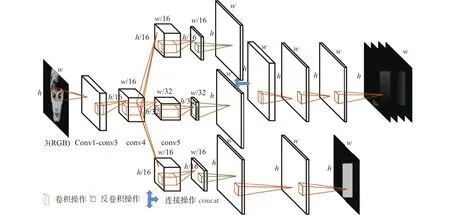
图 3 模型结构Fig. 3 Model structure
在卷积神经网络中pooling层主要起降低分辨率的作用,越往后特征层的分辨率会越小,也越能够提取出抽象的语义信息,但越抽象的特征细节信息丢失越多,在处理像素级分类任务时仅使用高层抽象的特征会导致边缘部分分类不准确。但是若完全依靠前面层的特征,虽然能够提高对人脸区域边缘的像素点的分类能力,但是由于浅层特征的抽象能力不够使得整体上分类结果不准确。文献[8,20]的研究表明通过融合不同的特征层能够显著提升网络的效果,FCN[8]中的实验也证明融合不同特征层特征的有效性,主要融合方式有FCN-32、FCN-16、FCN-8。UnitBox[6]认为人脸区域边框回归需要抽象的语义信息,所以仅使用了pool5层的特征用于处理边框回归任务,但实际实验中表明融合pool5和pool4两个特征层的特征能显著提升结果。
本文的模型共享特征层后对于不同的任务添加了多个3×3的独立卷积操作,像素级分类得分的标签是[0, 1],而人脸区域内坐标偏移量的标签是[0,+w](这里的w代表所有标注人脸区域的宽或高的最大值),pool5特征层的分辨率是输入的1/32,pool4是输入的1/16,使用与输出同样数量的卷积操作会丢失大量信息,不仅不会帮助模型训练反而会将前面学习到的错误结果放大降低网络的性能,而使用更多的卷积操作虽然会增加模型的表达能力但也会增加模型的时间复杂度。
3 损失函数设计
人脸检测问题可以看作两个子问题的组合:人脸区域定位问题和图像分类问题。图像分类是对整张输入图像分一个类别,而图像分割是标注图片每一个像素到对应类别的任务,本文将人脸检测问题中的图像分类问题看成人脸区域分割问题。当将图像中的每一个像素都分配一个对应的候选框,那么人脸检测问题可以分解为图像分割问题和候选框回归问题两个子问题,分别对应候选框得分和候选框回归。每一个像素的分类得分也是这个像素对应预测矩形框的得分。本文使用多任务联合训练,主要包括人脸区域分割任务和人脸区域内像素点坐标偏移回归任务。针对分类任务我们使用的是交叉熵损失函数 Lce,人脸区域的坐标偏移量回归使用重叠率损失函数 Liou,为了使两个损失函数在训练的过程中的梯度保持在同一个量级上,我们引入了一个权值λ,使得最终的损失函数L为

3.1 交叉熵损失函数
像素级分类问题是要得到每一个像素输入属于每个类别的概率,人脸检测问题是二分类问题,即人脸与非人脸。本文使用sigmoid激活函数实现从特征空间到[0, 1]概率空间的映射,得到每一个像素分类得分的概率,然后使用交叉熵损失函数指导网络训练。sigmoid激活函数为

式中的 wjx+bj表示在激活函数前的卷积核大小为1×1的卷积层。假设像素点 p(xi,yi)被预测为人脸的概率为 pfi,则非人脸的概率为1 −pfi,若该像素点在人脸区域内该像素点的标签 gi=1,否则 gi=0。具体的交叉熵损失函数为

3.2 重叠率损失函数

l2损失函数为

重叠率损失函数为


图 4 重叠率Fig. 4 Intersection-over-union
4 基于加权得分的非极大值抑制方法
非极大值抑制方法(non-maximum suppression,NMS)是目标检测中常用的后处理方法,当算法对同一个目标检测出多个重叠率较高的框,需要使用NMS来选取重叠区域里分数最高的矩形框(人脸的概率最大),非极大值抑制方法采用的是排序—遍历—消除的过程,在这个过程中检测出来的矩形框的得分不变,在一定程度上会影响算法性能。N.Bodla等[21]发现在排序阶段对重叠率高于阈值且得分较低的预测框的得分进行加权,再过滤掉得分低的矩形框能有效解决非极大值抑制算法导致的漏检问题。
受文献[21]的启发,我们在非极大值抑制的过程中使用两次遍历和消除过程,在第一次遍历过程中,当两个框的重叠率大于时,将得分较低的窗口的得分乘以一个权值,然后根据加权后的得分过滤掉低于的窗口,完成后再次使用没有加权的非极大值抑制方法得到最终检测结果。在实验过程中,测试了两种不同的加权方法:线性加权和高斯加权。两种加权方法的具体计算:当两个窗口交并比小于 α,则得分低的窗口的得分要乘以权值weight。
线性加权为

高斯加权为

5 实验与结果分析
为了验证方法的有效性,我们使用Wider Face数据集[22]的训练集训练,并在FDDB数据集[23]和Wider Face数据集[22]的验证集上评测结果,并与当前领先的算法进行比较,此外本文还比较了使用不同加权方式的非极大值抑制方法的性能。
5.1 实验数据
FDDB人脸评测[23]平台的测试集有2 845张图片,共有5 171张标注人脸,范围包括不同姿态、不同分辨率、不同遮挡情况的图像。评测指标是检测出的矩形区域和标注区域的重叠率,重叠率大于等于0.5表示检测正确。
Wider Face数据集[22]是由香港中文大学公开发布的人脸检测基准数据集,包含训练集、验证集和测试集3部分,是现有FDDB数据集中标注的图像数量的10倍。共包含3.2万张图像,39.3万张手工标注的人脸,平均每张图像有12个标注的人脸。Wider Face数据集中的人脸姿态、大小、遮挡情况变化多样,数据集以小人脸为主且人脸区域的分辨率偏低。整个Wider Face数据集中的图像分为61个事件类别,根据标注人脸的大小,数据集中的人脸检测任务分为3个难度等级Easy、Medium、Hard,所以有3条评测曲线。
5.2 实验设置与结果分析
本文使用的训练数据来自Wider Face[22]的训练集,总共有12 880张图像,统一将训练图像的宽和高用ImageNet[24]上的图像均值填充为32的倍数,测试时同样对图像填充为32的倍数。训练是以标注的人脸区域中心周围占整个人脸区域3/5的区域为正样本,该区域关于标注的人脸区域中心对称。其他像素点设为负样本。由于原始的UnitBox[6]论文没有公布测试模型和源代码,在本文中我们复现了UnitBox[6]代码作为比较对象。在使用多任务联合训练,由于人脸区域分类的损失和人脸区域边框回归的损失函数不在同一个数量级上,本文对分类损失赋权0.001。训练是在WiderFace训练集上训练,每次使用一张图像,使用Adam算法[25]在整个数据集上迭代训练30轮,本文使用加权的非极大值抑制算法做后处理。
图5中比较了本文的算法与原始UnitBox[6]算法在FDDB数据集上的性能,同时对比了另外7个经典的人脸检测算法:DDFD[17]、CascadeCNN[16]、ACF-multiscale[26]、Pico[27]、HeadHunter[28]、Joint-Cascade[29]、Viola-Jones[9],实验表明本文的多级特征串联能明显提升算法性能。本文的方法在共享的卷积层和串联的特征层后都添加了卷积层,同时本文单独对pool5层的特征添加同样的卷积层作为对比实验(UnitBox-refine)。从图5 中可以看出,仅仅在pool5层输出的特征后添加卷积操作的结果为0.859,而在结合pool4和pool5层特征后再添加卷积操作的结果为0.906,说明仅仅对单层特征进行多次卷积和池化操作不能有效提升检测结果。
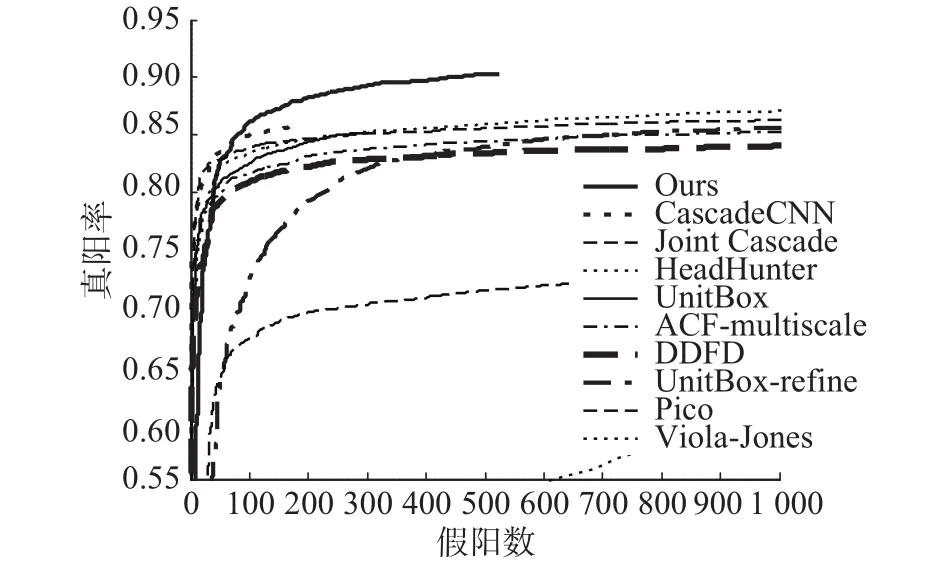
图 5 FDDB数据集ROC曲线Fig. 5 ROC Curve on FDDB dataset
同样的,在WiderFace数据集的验证集上测试比较了本文算法与其他领先算法的性能。图6展示了本文算法在WiderFace验证集的Easy、Medium和Hard三个难易程度上的性能曲线。还对比了多个先进的人脸检测算法:LDCF+[30]、Multiscale Cascade CNN[22]、Faceness-WIDER[31]、ACF-WIDER[26],在Easy难度上本文算法比LDCF+[30]高0.5个百分点,在UnitBox[6]的基础上提高了9个百分点,在Medium难度上取得了0.737的检测结果,在Hard难度上比UnitBox[6]提升了9.8个百分点。图7展示了本文算法的部分检测结果。
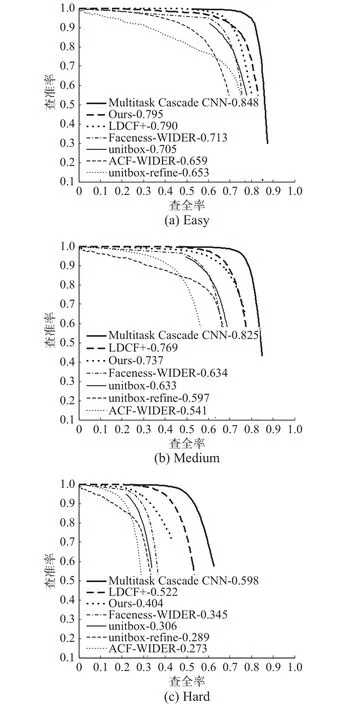
图 6 WiderFace验证集上的准确率-召回率曲线Fig. 6 Percision-recall curve on Wider Face Val set
表1比较了加权得分的非极大值抑制方法和不加权的极大值抑制方法的后处理结果,这里高斯加权中使用的方差sigma=0.5。可以看出在FDDB数据集中使用高斯加权和线性加权获得的提升一样,在WiderFace数据中使用高斯加权的提升明显大于线性加权,说明高斯加权的方法更适合于小人脸检测问题。在图8中我们展示了部分不同的NMS方法的处理结果。
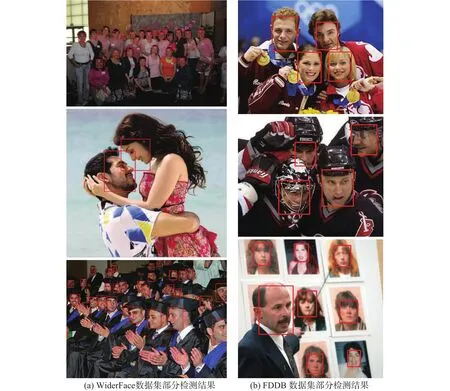
图 7 检测结果Fig. 7 Detection results

表 1 NMS对比实验准确率Table 1 The accuracy of contrast experiment

图 8 不同NMS的后处理结果对比Fig. 8 The comparesion of NMS methods
6 结束语
目标检测和图像分割问题是计算机视觉中两个重要的基本问题, 本文的人脸检测方法试图将解决图像分割问题的算法框架尝试应用于人脸检测问题。在前人的基础上本文探索了不同的特征串联方法对人脸区域坐标回归的影响,通过实验发现并不是特征组合得越多结果越好,本文使用pool4和pool5两个特征层的特征取得了很大的提升。在后处理阶段,本文通过比较分析不同的非极大值抑制策略的性能,发现通常使用的不加权的非极大值抑制方法虽然高效,但会在一定程度上影响目标检测方法的性能。本文在人脸区域分类问题和人脸区域内像素点坐标偏移量回归两个问题实际上是分开处理,在今后的研究中如何发现并使用这两个问题之间的关联性是一个很重要的研究思路。本文虽然使用加权得分的方法在一定程度上缓解了非极大值抑制方法检测算法的影响,但没有得出一般性的结论,这个问题同样值得深入研究。
[1]ZAFEIRIOU S, ZHANG Cha, ZHANG Zhengyou. A survey on face detection in the wild: past, present and future[J]. Computer vision and image understanding, 2015, 138:1–24.
[2]GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Columbus, OH,USA, 2014: 580–587.
[3]GIRSHICK R. Fast R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision. Santiago,Chile, 2015: 1440–1448.
[4]REN Shaoqing, HE Kaiming, GIRSHICK R, et al. Faster RCNN: towards real-time object detection with region proposal networks[C]//Proceedings of the 28th International Conference on Neural Information Processing Systems.Montreal, Canada, 2015, 1: 91–99.
[5]HUANG Lichao, YANG Yi, DENG Yafeng, et al. Dense-Box: unifying landmark localization with end to end object detection[J]. arXiv preprint arXiv: 1509.04874, 2015.
[6]YU Jiahui, JIANG Yuning, WANG Zhangyang, et al. Unit-Box: An advanced object detection network[C]//Proceedings of the 2016 ACM on Multimedia Conference. Amsterdam, The Netherlands, 2016: 516–520.
[7]SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[C]//Proceedings of the International Conference on Learning Representations. Oxford, USA, 2015.
[8]LONG J, SHELHAMER E, DARRELL T. Fully convolutional networks for semantic segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA, USA, 2015: 3431–3440.
[9]VIOLA P, JONES M. Rapid object detection using a boosted cascade of simple features[C]//Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Kauai, HI, USA, 2001, 1: I-511–I-518.
[10]LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International journal of computer vision,2004, 60(2): 91–110.
[11]DALAL N, TRIGGS B. Histograms of oriented gradients for human detection[C]//Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Diego, CA, USA, 2005, 1: 886–893.
[12]OSUNA E, FREUND R, GIROSIT F. Training support vector machines: an application to face detection[C]//Proceedings of the 1997 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Juan,Argentina, 1997: 130–136.
[13]FRIEDMAN J, HASTIE T, TIBSHIRANI R. Additive logistic regression: a statistical view of boosting (with discussion and a rejoinder by the authors)[J]. The annals of statistics, 2000, 29(5): 337–407.
[14]ZITNICK C L, DOLLÁR P. Edge boxes: locating object proposals from edges[C]//Proceedings of the 13th European Conference on Computer Vision. Zurich, Switzerland,2014: 391–405.
[15]UIJLINGS J R R, VAN DE SANDE K E A, GEVERS T,et al. Selective search for object recognition[J]. International journal of computer vision, 2013, 104(2): 154–171.
[16]LI Haoxiang, LIN Zhe, SHEN Xiaohui, et al. A convolutional neural network cascade for face detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA, USA, 2015: 5325–5334.
[17]FARFADE S S, SABERIAN M J, LI Lijia. Multi-view face detection using deep convolutional neural networks[C]//Proceedings of the 5th ACM on International Conference on Multimedia Retrieval. Shanghai, China, 2015: 643–650.
[18]KRIZHEVSKY A, SUTSKEVER I, HINTON G E. ImageNet classification with deep convolutional neural networks[C]//Proceedings of the 26th Annual Conference on Neural Information Processing Systems 2012. Lake Tahoe,Nevada, USA, 2012: 1097–1105.
[19]HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al.Deep residual learning for image recognition[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, NV, USA, 2016: 770–778.
[20]HARIHARAN B, ARBELÁEZ P, GIRSHICK R, et al. Hypercolumns for object segmentation and fine-grained local-ization[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA, USA,2015: 447–456.
[21]BODLA N, SINGH B, CHELLAPPA R, et al. Improving object detection with one line of code[J]. arXiv preprint arXiv: 1704.04503, 2017.
[22]YANG Shuo, LUO Ping, LOY C C, et al. Wider Face: A face detection benchmark[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Las Vegas, NV, USA, 2016: 5525–5533.
[23]JAIN V, LEARNED-MILLER E. FDDB: A benchmark for face detection in unconstrained settings[R]. UMass Amherst Technical Report UMCS-2010-009, 2010.
[24]DENG Jia, DONG Wei, SOCHER R, et al. ImageNet: A large-scale hierarchical image database[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Miami, FL, USA, 2009: 248–255.
[25]KINGMA D P, BA J L. Adam: A method for stochastic optimization[C]//Proceedings of International Conference on Learning Representations. Toronto, Canada, 2015.
[26]YANG Bin, YAN Junjie, LEI Zhen, et al. Aggregate channel features for multi-view face detection[C]//Proceedings of the 2014 IEEE International Joint Conference on Biometrics (IJCB). Clearwater, FL, USA, 2014: 1–8.
[27]MARKUS N, FRLJAK M, PANDZIC I S, et al. A method for object detection based on pixel intensity comparisons organized in decision trees[J]. CoRR, 2014.
[28]MATHIAS M, BENENSON R, PEDERSOLI M, et al.Face detection without bells and whistles[C]//Proceedings of the 13th European Conference on Computer Vision.Zurich, Switzerland, 2014: 720–735.
[29]CHEN Dong, REN Shaoqing, WEI Yichen, et al. Joint cascade face detection and alignment[C]//Proceedings of the 13th European Conference on Computer Vision. Zurich,Switzerland, 2014: 109–122.
[30]OHN-BAR E, TRIVEDI M M. To boost or not to boost?On the limits of boosted trees for object detection[C]//Proceedings of the 23rd International Conference on Pattern Recognition (ICPR). Cancun, Mexico, 2016: 3350–3355.
[31]YANG Shuo, LUO Ping, LOY C C, et al. From facial parts responses to face detection: A deep learning approach[C]//Proceedings of the IEEE International Conference on Computer Vision. Santiago, Chile, 2015: 3676–3684.
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
少儿美术·书法版(2021年9期)2021-10-20
小学生必读(低年级版)(2021年5期)2021-08-14
现代电子技术(2021年1期)2021-01-17
红领巾·萌芽(2019年8期)2019-08-27
上海大学学报(自然科学版)(2018年5期)2018-11-02
动漫星空(2018年9期)2018-10-26
电脑知识与技术(2018年35期)2018-02-27
中国与非洲(法文版)(2017年10期)2017-11-23
自动化学报(2017年11期)2017-04-04