
智能软体驱动器的跟踪控制器设计
2018-03-15 05:42黄二辉王瑷珲王东云李继朋郭光复
中原工学院学报 2018年1期
黄二辉, 王瑷珲, 王东云,2, 李继朋, 郭光复
(1.中原工学院 电子信息学院 , 郑州 450007; 2.黄淮学院, 河南 驻马店 463000)
近年来,在智能工业化的影响下,工业机器人在市场中占有重要的地位,而且制造技术越来越成熟。然而工业机器人因体积大、不能灵活移动、稳定性低等诸多缺点,越来越满足不了恶劣环境的作业要求,而具有相当强柔性的软体机器人因此登上历史舞台[1]。
虽然软体机器人在复杂的环境中有很好的弯曲性和伸展性,但是软体驱动器具有较高的自由度和非线性等复杂特性,这对智能软体材料的数学建模、跟踪控制器设计造成了极大挑战[2]。智能软体驱动器是构建现代智能软体机器人的基石,它在未来智能材料中有很好的应用前景和广阔的发展空间。然而软体驱动器具有非线性、耦合性强和自身材料不确定性等复杂情况,目前没有一个很好的控制方法来消除这些问题[3]。本文提出了一种软驱动器跟踪控制器的设计方法,为非线性跟踪控制研究提供一定参考。
1 软体驱动器
本文以10 mm的无纤维单腔双向弯曲橡胶软体驱动器为研究对象(图1)。该驱动器具有很好的双向弯曲特性,可以通过供给外部空气来施加正向压力和负向压力以执行软体驱动器的打开或关闭动作,能够保证软体驱动器平稳地抓取物体。
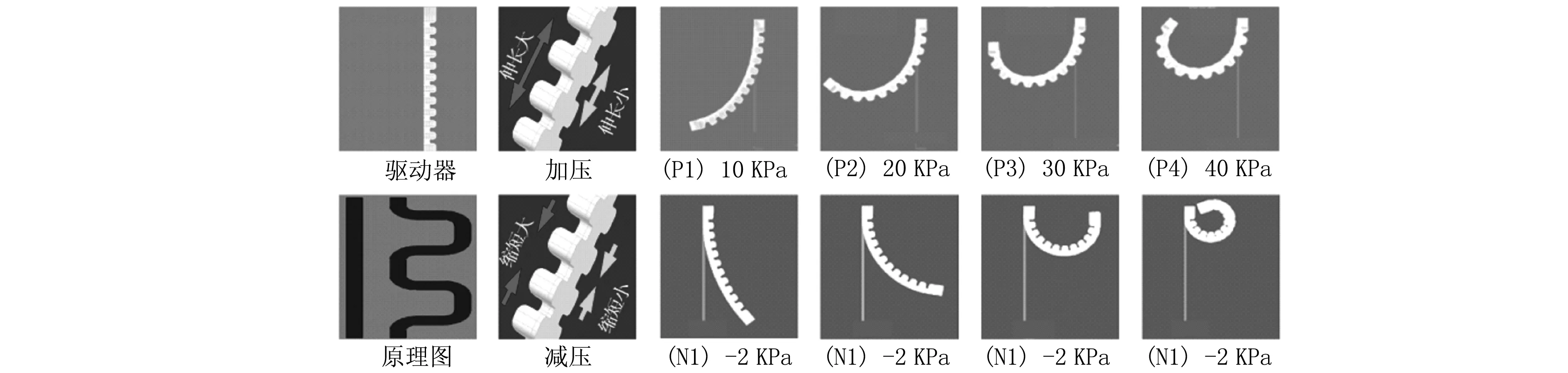
图1 单腔双向弯曲软驱动器
软体驱动器的弯曲角度与输入压力之间的关系可表示为:
(1)

这里π取值3.14,输入压力u的取值为:16≤u≤40
式(1)可以转化为:
(2)
式(2)可以看作输入角度θ和参数γ的函数关系式,这是一个非线性模型,其中
(3)
将表1的参数值带入式(2),得到输出和输入的关系式为:
(4)
从式(4)可以看出,输入和输出呈现出一种非线性关系。
输入压力u的取值范围为-16≤u≤40,且输入压力间隔为0.5,这里采集了112个输入和输出的数据点,通过MATLA软件编程,得到被控对象的输出和输入关系图如图2所示。
2 跟踪控制器的设计
2.1 模型线性近似化
本文采用PID控制方法来设计跟踪控制器,跟踪控制器的系统设计框图如图3所示。跟踪控制器C的设计表达式为:
(5)
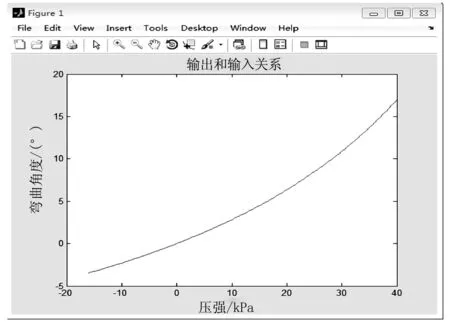
图2 输出和输入关系图

图3 跟踪控制器的系统设计框图
如何得到跟踪控制器的3个控制参数kp、ki、kd是设计重点[4]。本文通过系统辨识工具箱将非线性控制对象拟合成一条拟合度相当高的线性传递函数,用simulink中的参数优化工具箱对3个参数进行优化,得出一组最优的参数。
打开MATLAB中的command window命令窗口[5],依次将输入变量u和输出变量y输到里面,并将其导到工作空间,然后在窗口中输入ident命令打开系统辨识工具箱,见图4。
先通过remove means方法对数据进行处理,并保存到data views里面,每做一次处理,都要将需处理的数据拖放到working data中。然后,将处理之后的数据拉到working data 中,进行selecy range处理,对处理后数据分别进行选取,两次图形选取如图5所示。
点击insert后,将一部分放入到working data中用于建立模型,另一部分放入到validation data中用来验证所建立模型的拟合度是否达到要求。 通过线性化处理生成多个模型如图6所示。
将select range处理之后数据的前半部分拖入到working data,后半部分拖到validation data,点击estimate,会出现一个下拉菜单,点击菜单中process models生成模型传递函数,点击Model output查看拟合度情况。本文辨识出的系统拟合度最高为99.9%,在import models图形中双击拟合度最高的曲线,会出现一组传递函数,被控对象的近似化线性传递函数就是拟合度最高时所生成的函数。
在import models图形中双击拟合度最高的曲线,这时会出现一组传递函数,如图7所示,被控对象的数学模型可以近似表示为

图4 系统辨识工具箱

图5 两次图形选取
(6)
2.2 跟踪控制器的参数优化
通过系统辨识工具箱辨识出被控对象的传递函数,接下来建立加入寻优模块的控制系统,如图8所示。在MATLAB中利用Signal Constraint模块得到跟踪控制器的最优数据[6]。跟踪控制器参数寻优问题的目标是要在Kp、Ki、Kd的可行域空间中寻找某一组参数,在保证参数稳定的前提下,使选定的系统性能指标最优。

图6 通过线性化处理生成模型
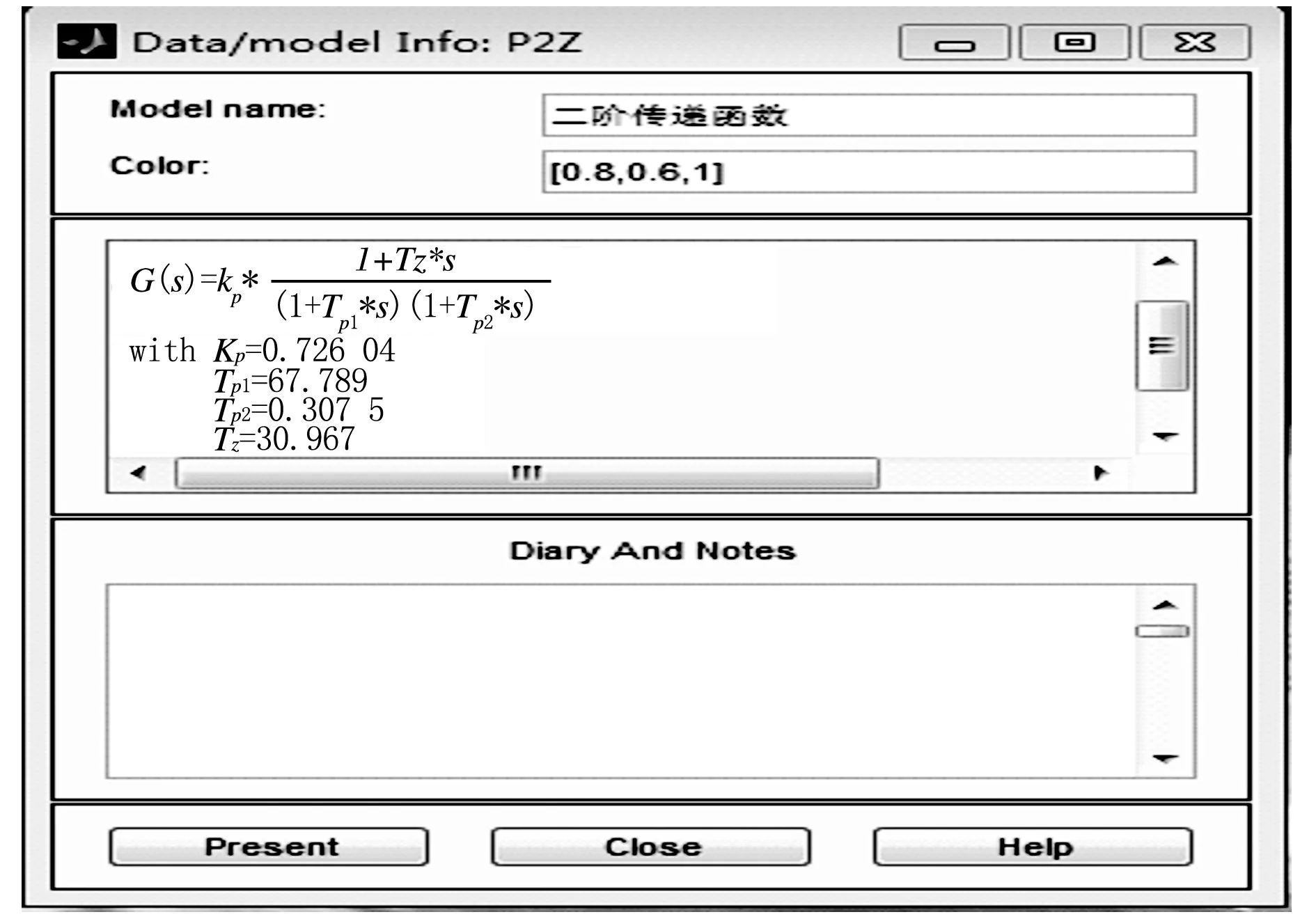
图7 传递函数

图8 加入寻优模块的控制系统
在MATLAB的command Window中对PID跟踪控制器的初始值进行设置:Kp=0.04、Ki=0.01、Kd=0.01。
建立待整定的PID参数与Signal Constraint模块的关联:可选择Signal Constraint模块中Optimization→Turned Parameters命令,点击add按钮,将弹出窗口中显示的位于MATLAB中已进行初始定义的变量Kp、Ki、Kd依次定义为系统将要优化的参数。
完成设置后,点击Signal Constraint模块上的开始按钮,寻优过程将自动执行,得到寻优参数值见图9,即Kp=36.973 9、Ki=16.875 9、Kd=-0.494 7。

图9 参数优化结果
将最优参数带入到跟踪控制器C里面,软体驱动器的跟踪控制器设计为

(7)
通过优化得到的跟踪响应曲线如图10所示,由图10可知,阶跃响应的上升时间很快,只需要1.7 s,到达响应稳态的调节时间很短,误差范围在3%,超调量很小。因此所设计的跟踪控制器跟踪效果较好。

图10 跟踪响应曲线
3 结 语
本文针对研究对象复杂的非线性特性提出了一种跟踪控制器设计方法,即非线性模型线性近似化。通过对跟踪响应曲线分析可知,所设计的跟踪控制器跟踪效果很好,验证了所设计的跟踪控制器的可行性和有效性。
[1] 史震云, 朱前成. 基于智能驱动器的软体机器人系统[J]. 北京航空航天大学学报, 2016, 42(12):2596-2602.
[2] 王华,康荣杰,王兴坚,等.软体弯曲驱动器设计与建模[J]. 北京航空航天大学学报,2017,43(5):1053-1060.
[3] Wang A, Deng M, Wakimoto S, et al. Characteristics analysis and modeling of a miniature pneumatic curling rubber actuator[J]. International Journal of Innovative Computing, Information and Control, 2014, 10 (3): 1029-1039.
[4] 朱发国, 姚玉斌, 陈学允. 发电机组汽门的新型非线性PID控制器设计[J]. 电网技术, 1999, 23(5):24-27.
[5] 陈岚峰, 张亚琴, 程立英,等. 基于数据的MATLAB系统辨识工具箱模型识别[J]. 沈阳师范大学学报(自然科学版), 2013, 31(4):527-530.
[6] 孙庆克, 顾伟, 褚建新,等. 基于Matlab/Signal Constraint工具箱的电动振动台的研究[J]. 计算技术与自动化, 2015(2):38-41.
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
水道港口(2022年2期)2022-07-04
上海交通大学学报(2021年2期)2021-03-02
水泥工程(2020年4期)2020-12-18
军事文摘(2020年24期)2020-11-29
发明与创新·中学生(2019年1期)2019-03-23
中成药(2017年10期)2017-11-16
中国科技纵横(2016年10期)2016-12-01
中国质量与标准导报(2014年12期)2014-02-28
