
基于Vissim仿真的有轨电车应急方案设计
2018-03-16 08:43高永博DENGJunWANGGAOYongbo
物流科技 2018年2期
邓 君,王 娥,高永博 DENG Jun,WANG E,GAO Yongbo
(1.中交城市轨道交通设计研究院有限公司,湖北 武汉 430100;2.兰州交通大学 交通运输学院,甘肃 兰州 730070)
0 引言
随着对环境问题的日益重视,有轨电车因为节能减排受到了广泛的关注。但由于有轨电车也会遭遇突发事件,如轨道占用、车辆故障、交通事故等,导致运营中断、道路拥挤、排队等待,从而严重干扰乘客的正常生活。快速有效地应对突发事件,为乘客提供救援服务,对有轨电车系统的持续性运营至关重要。应急管制方案又称应急计划,是针对城市轨道交通可能发生的突发事件和重大事故,为保证迅速、有序、有效地开展应急与救援行动,降低事故损失而预先制定的计划或方案。应急管制方案设计的目标是使得乘客尽快撤离,提高车辆通行能力,对拥堵情况采取疏散措施,降低对城市常规交通出行需求的干扰程度。本文提出的方法是对应急车辆和有轨电车都实行优先控制策略。
1 控制逻辑
突发事件下交叉口的信号优先控制对象为应急车辆、有轨电车和社会车辆,本文主要研究突发事件下的应急车辆和有轨电车运行控制方法,如果检测器检测到车辆为应急车辆,则进行时间估计进而决定使用那种优先策略进行信号控制;如果不是应急车辆,那么开始检测是否为有轨电车,如果是有轨电车,则根据到达时间、消散时间等来判断信号状态,选择控制策略,具体控制逻辑流程如图1所示:
2 模型构建
2.1 车辆到达时间估计
假设当突发事件发生以后,会产生交通拥堵现象,本文模型的构建就是对拥堵情况进行疏散。当有轨电车车辆即将到达交叉口时,布置在交叉口上游的检测装置被触发,控制机发送优先请求信号。在正常情况下,应急车辆到达交叉口的时间估计为:

式中:LEV为应急车辆到交叉口停车线的距离;VEV为应急车辆的平均速度。
有轨电车到达下一个站点需要的时间为:

式中:t1为有轨电车到达交叉口停车线所需要的运行时间;t2为有轨电车通过交叉口需要的时间;t3为有轨电车通过交叉口,并且到达下一有轨电车站点的行程时间。
2.2 车辆消散时间估计
所有排队车辆全部消散所需要的时间:

2.3 选择控制策略
对于本文的信号优先感应控制策略需要布设检测器才能有效实现。如图2所示,检测器1和检测器2检测有轨电车,检测器3和检测器4检测应急车辆。检测器1(驶出检测器)检测车辆驶出检测区域,到停车线的距离大约为5~10米;检测器2(驶入检测器)检测车辆驶入检测区域,到停车线的距离大约为80~100米;检测器3,4的位置和检测器1,2的位置一样,有轨电车车长为l,检测器2到停车线的距离为L,有轨电车的平均速度为V,则:

图1 控制逻辑图
式中:V()t为t时刻,在优先车辆所在的车道上,处于排队状态的车辆数;S为车道饱和流率。


图2 交叉口检测器布置图
当车辆到达交叉口时,如果检测器检测到应急车辆,则交通信号控制机发送优先请求,给予绝对优先信号。对于应急车辆来说,为保证应急车辆到达交叉口停车线之前其他车辆及时消散,tEV必须大于等于tD。此时采取其他车辆变换车道给应急车辆让行的方式或者直接切换到应急车辆相位,使得应急车辆尽快通过交叉口。
对于有轨电车而言,优先控制策略的选择,要根据检测到有轨电车时交叉口的信号状态来确定:
(1)绿灯延长:当有轨电车在绿灯相位内未到达,延长绿灯时间,从而允许有轨电车通过。若t1≤g剩,则不延长绿灯时间;若t1>g剩,则延长绿灯时间。g剩为当前相位绿灯剩余时间,Δt为绿灯延长时间:

由于绿灯时间延长使原本需要等待下个绿灯周期的车辆迅速及时的驶离交叉口。其车均延误为:

式中:Dij为第i相位第j进口道上车辆减少的延误;qij为第i相位第j进口道上车辆到达率;sij为第i相位第j进口道上车辆离开的饱和流率;ri为第i相位有效的红灯时间。
人均延误为(C为周期长度):

式中:P为车辆平均载客数量;ti为第i相位车辆到达交叉口的时刻;gis为绿灯开始时刻。
(2)绿灯提前启亮:当有轨电车在红灯相位到达时,绿灯相位的起始时间比计划的起始时间早,则应该采取绿灯提前启亮策略,即t1<r剩,则提前启亮绿灯(红灯早断),r剩为当前相位红灯剩余时间;若t1≥r剩,则不提前启亮绿灯。

由于绿灯提前启亮,红灯时间减少,也可以使车辆及时快速的驶离交叉口,这种方式降低有轨电车的等待时间,减少车辆延误。绿灯提前启亮产生的车均延误为:

人均延误为:
3 实例验证
选取某一典型十字交叉口,在Vissim仿真系统中进行仿真验证试验来探讨有轨电车在突发事件下采用本文给出信号优先策略的影响。图3为该交叉口模拟路网图,从中可见现代有轨电车线路采用南北方向中央布设形式,每个方向皆有3条一般车道,在不同时段,对交叉口各进口道、各流向车流量进行调查,记录数据。
图4为四相位放行方式,图5为有轨电车专用相位。
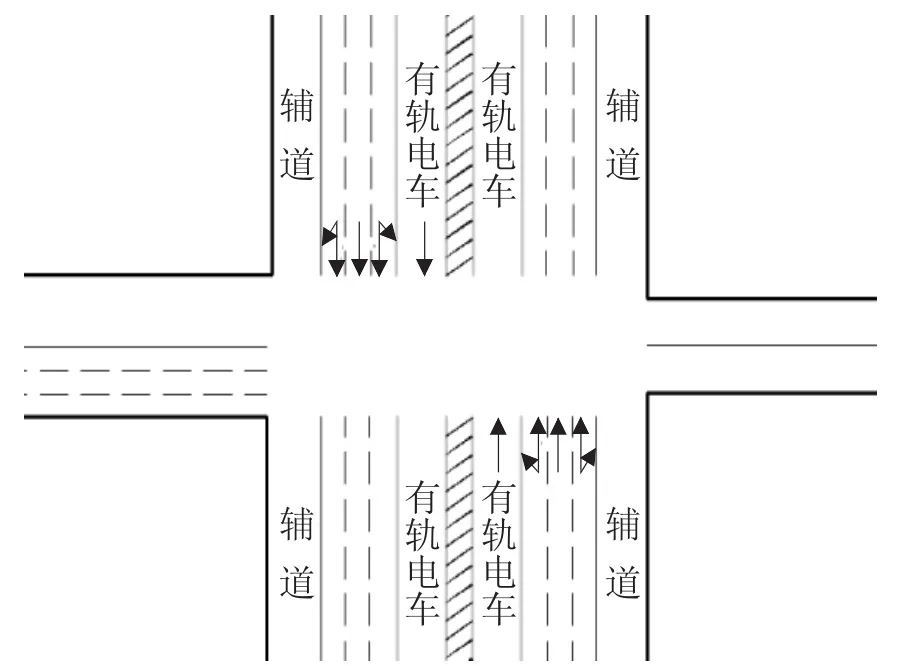
图3 某十字交叉口模拟路网图
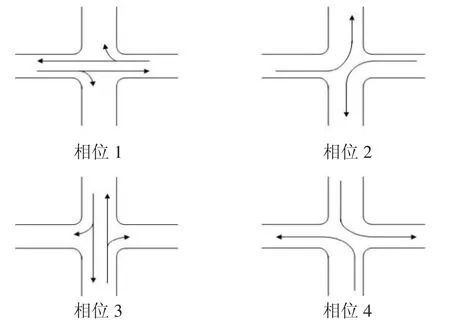
图4 四相位放行方式
在仿真试验中,有轨电车时相与不相冲突的社会车辆时相(相位三)同时启动同时禁止。
假设道路行驶车辆主要为有轨电车和社会车辆。在早高峰拥堵时段对交叉口各进口道各向车流量进行调查,作为应急模拟场景。结果见表1:
仿真试验模拟时间为3 600s,每秒扫描1次,有轨电车发车频率为180s。仿真结束后,仿真系统将仿真结果(例如:行程时间、排队时间、车均延误、人均延误等仿真参数)保存在生成的数据文件中,通过对文件进行处理,得到实施信号优先前后有轨电车行程时间、排队时间、车均延误、人均延误和整个交叉口车均延误、人均延误数据比对,如表2和表3:
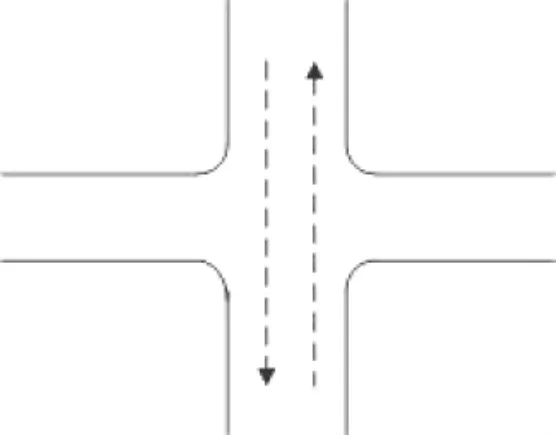
图5 有轨电车专用相位
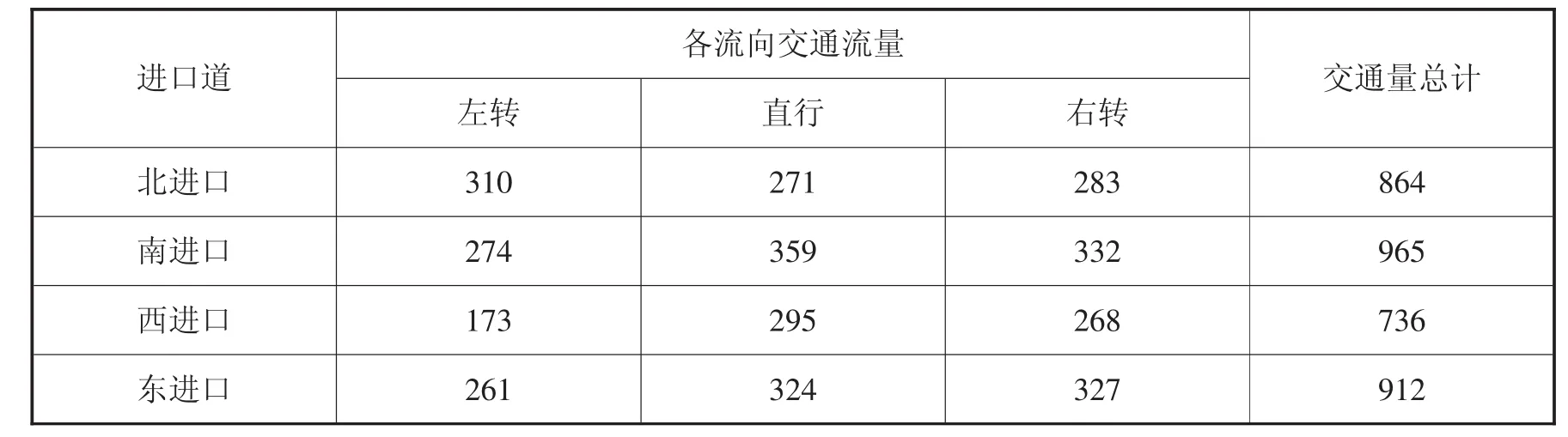
表1 十字交叉口交通量

表2 应急车辆和有轨电车运行效果对比

表3 交叉口运行指标对比
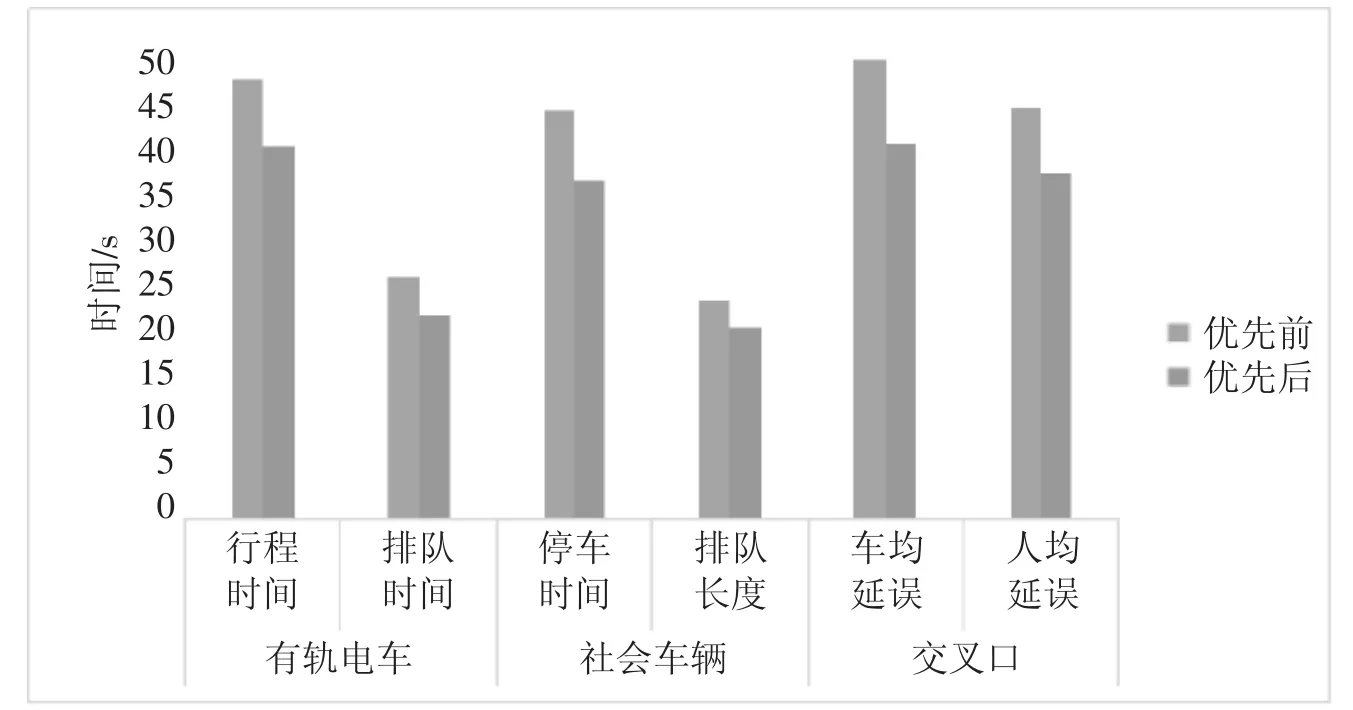
图6 优先前后各指标对比
图6 表示,应急车辆和有轨电车优先后的行程时间、排队时间、车均延误和人均延误比优先前明显降低,与有轨电车处于同一相位的社会车辆排队长度和停车时间也受其影响而降低,从而提高其通行效率,整个交叉口的车均延误和人均延误也明显降低。
4 结 论
本文针对突发事件对有轨电车系统产生的影响,提出了突发事件下有轨电车运行控制方法,在控制模型中对有轨电车则根据每辆车当前的信号状态来确定采取绿灯延长或者绿灯提前启亮的控制策略,对有效地降低交叉口的延误起到了关键性的作用,确保整个交叉口的安全与高效运行。
[1] 田春林.快速公交运行控制系统关键理论与方法研究[D].吉林:吉林大学(博士学位论文),2014.
[2] Thompson A,Nicholls J.Signal Preemption Using Traffic Control Network[J].Traffic Technology International,1997(5):25.
[3] Bason N,Williams M,Kiremidjian A.A GIS-Based Emergency Response System for Transportation Networks[J].Earthquake Engineering,2003,131(16):926-935.
[4] Luiz A K,Wemer K J.Simultaneous control of traffic lights and bus departure for priority operation[J].Transportation Research Part C,2010(18):288.
[5] 杨晓光,林瑜,杭明升.信号控制交叉口公共汽车优先信号确定方法研究[J].中国公路学报,2001(14):101-105.
[6] 张卫华,陆化普,石琴,等.公交优先的信号交叉口配时优化方法[J].交通运输工程学报,2004,4(3):49-53.
[7]徐智勤,于波.关于成都市局部区域发展有轨电车项目的设想[C]//地下铁道新技术文集,成都:西南交通大学出版社,2003:829-832.
[8] 刘立龙,李建成.基于Vissim的现代有轨电车交叉口信号优先控制策略研究[J].公路与汽运,2014(11):56-58.
[9] 彭丰.半独立路权条件下有轨电车交叉口信号控制仿真优化研究[D].北京:北京交通大学(硕士学位论文),2015.
[10] 方艳.有轨电车系统中断事件的协作救援决策方法研究[D].大连:大连理工大学(博士学位论文),2013.
[11] 田宝春.应急s情况下城市交叉口交通信号控制研究[D].兰州:兰州交通大学(硕士学位论文),2014.
[12]蒋家升,王斐尧.一种基于时间优先策略的现代有轨电车路口优先实现方法[J].科技展望,2016(20):128-129.
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19
中国交通信息化(2017年9期)2017-06-06
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
工业设计(2016年11期)2016-04-16
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
河南科技(2014年22期)2014-02-27
河南科技(2014年14期)2014-02-27
食品科学(2013年8期)2013-03-11
