
基于耦合控制的双电机调速系统仿真分析
2018-03-16 07:24王飞
机械管理开发 2018年2期
王 飞
(山西焦煤集团西山煤电股份公司西曲矿,山西 古交 030200)
引言
目前全世界矿井工作面开采所用的采煤机牵引电机均为交流调速电机[1],与直流调速电机相比,该类型的电机节约制造成本,且调速稳定。随着煤层开采厚度的不断增加,对采煤机功率的要求也更高,如果采煤机牵引电机仅设置为1个,则电机的工作稳定性会下降[2],且电机较大,不利于采煤机割煤,故此时往往通过双电机牵引采煤机。双电机参数的不同往往造成两个电机运行不同步以及功率不一致[3-4]。对采煤机牵引部双电机不同协调控制方式下的优缺点进行比对分析可使采煤机牵引性能得到最大程度的发挥。国内外诸多专家学者通过采煤机整体模型的建立来研究其受力特征,但在采煤机牵引电机模型的分析上研究甚少,本文主要对采煤机双电机调速系统进行仿真分析,从而为双电机的协调控制提供一定依据。
1 交流调速电机的模型建立
为了对双电机的协调控制进行仿真分析,先进行单个交流调速电机的模型建立,所建模型需要为定量分析电机的能量转变提供基础,由此建立模型时做出如下假设:
1)铁芯的导磁系数是恒定不变的,不受涡流和磁滞等因素的影响;2)交流电机转子在三维方向上均是对称分布的;3)三相定子绕组和三相转子绕组间的夹角均为120°,故在结构和空间上也是对称的;
4)三相定子绕组和三相转子绕组产生的磁动势在三维空间中表现为正弦特征;
5)定子和转子表面均较为平整光滑;
6)只分析气隙基波磁场对交流电机的影响,而忽略其他作用。
三相绕组的转动方向为逆时针,在上述假设基础上可得定子绕组和转子绕组在三维空间中分布的对称性,由此得到三相绕组的纵向剖面图,如图1所示。
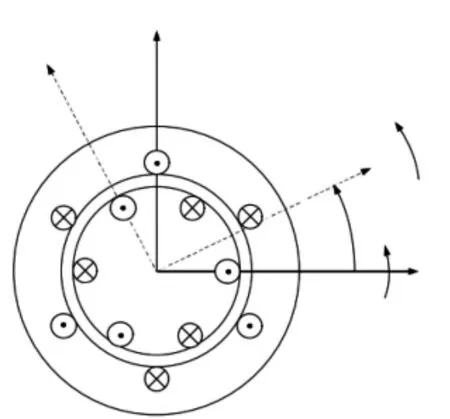
图1 三相绕组的纵向剖面示意图
2 交流调速电机的矢量控制系统
交流调速电机的内部结构较为复杂,如果可以把直流电机的数学物理模型适当转变用于交流调速电机的模型分析中,则可以简化计算过程。在电气调速传动系统中,直流电机可以发挥较好的动态性能,为了使直流电机这一性能充分应用于交流调速电机中,需要对其矢量控制系统进行研究。
2.1 变化坐标
交流调速电机的原始坐标极为复杂,通过进行合理的转变坐标可以得到合理的交流调速电机物理模型,目前变化坐标的方式主要可分为:
1)三相静止坐标系转变为两相静止坐标系,如式(1)所示:

2)两相静止坐标系转变为三相静止坐标系,如式(2)所示:

3)两相静止坐标系转变为两相旋转坐标系,如式(3)所示:

4)两相旋转坐标系转变为两相静止坐标系,如式(4)所示:

2.2 电机矢量控制
采煤机交流的双调速电机均通过变换矢量进行控制,这样电机的转矩和磁通均可进行单独控制,使其容易达到直流电机的调速效能。交流电机变化矢量的过程可总结为:把通过矢量旋转将三相定子绕组的控制量转变为两相交流控制量,通过式(2)获得三相交流的控制量,并通过该参数来操控交流调速电机的工作,完成电机的变换矢量。
在双电机调速系统建立仿真模型的基础上得到了调速仿真结果,如图2所示。

图2 调速系统仿真结果示意图
图2主要得到了时间延长过程中电机转矩、转速以及A相电流的变化特征,从图2中可以看出,双电机调速系统的实际速率可以较好地跟踪给定速率,同时电机调速效果良好。
3 双电机调速系统的仿真分析
并行控制可以实现采煤机多个电机的协调运行,该控制方式主要是对多个电机同时施加信号,使电机不会发生时间滞后效应,同时使之进行同步协调运转。基于此,建立并行控制的双电机调速系统的仿真模型,所建模型中双电机均受到50m的外载荷作用,电机牵引速率起始值为50 r/s,在5 s内速率升至85 r/s,模拟时间设置为10 s。本次模拟主要对双电机在受到干扰的影响下系统运行的稳定性特征进行研究,如图3和图4所示。
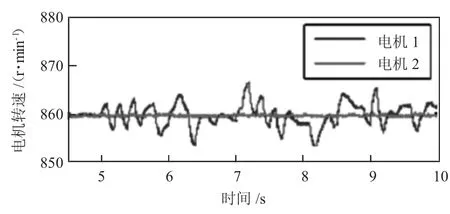
图3 电机1在受到干扰的影响下双电机转速变化示意图
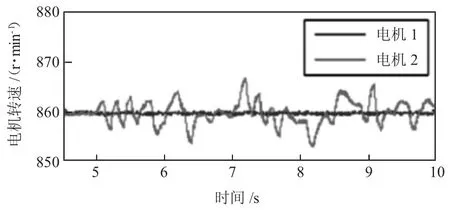
图4 电机2在受到干扰的影响下双电机转速变化示意图
从图3和图4中可以看出,受到干扰的电机其自身的转速也会受到较大程度的影响,而另一个电机转速不受影响,但二者转速出现差值,最大值可到9 r/min,意味着双电机无法保持同步协调转动。究其原因,并行控制方式也是开环控制方式,两个电机运行独立、互不干扰,故其中一个电机受到扰动时另一个电机不受其影响,且在受到干扰情况下两个电机无法保持同步运行,这也显示了并行控制方式的最大弊端。而耦合控制方式可以建立双电机转动运行间的关联性,具体控制方式为通过耦合控制器将双电机运行过程中产生的转速差值发送给转速调节器,并利用转速调节器来削弱该差值,使双电机可以保持同步协调转动。耦合控制方式的基本原理如图5所示。

图5 耦合控制方式的基本原理示意图
本次建立耦合控制双电机调速系统的仿真模型,电机牵引速率起始值为50 r/s,在5 s内速率升至85 r/s,模拟时间设置为10 s。本次模拟同样主要对双电机在受到干扰的影响下系统运行的稳定性特征进行研究,如下页图6、图7所示。

图6 电机1在受到干扰的影响下双电机转速变化示意图

图7 电机2在受到干扰的影响下双电机转速变化示意图
从图6、图7中可以看出,受到干扰的电机其自身的转速几乎不会受到影响,双电机的转速始终保持在同一值,充分说明了耦合控制下转速调节器削弱了双电机转速差值的有效性和及时性,双电机在干扰影响下也会保持同步协调转动。为了进一步证明耦合控制方式的高效性,对不同协调控制方式下双电机转速的偏差特征进行了研究,如图8所示。
从图8中可以看出,随着时间的延长,不同协调控制方式下双电机的转速偏差可排为:并行控制>主从控制>耦合控制。主从控制条件下从电机的转速受控于主电机,故该控制方式下双电机的转速偏差要小于并行控制。由于主从控制方式下双电机的响应存在迟滞效应,所以转速偏差一直存在。图8更加充分证明了耦合控制双电机调速系统的高效性。
4 结论
1)双电机调速系统的实际速率可以较好地跟踪对给定速率,同时电机调速效果良好。
2)并行控制下受到干扰的电机其自身的转速会受到较大程度的影响,而另一个电机转速不受影响,但二者转速会出现差值,最大值可到9 r/min,意味着双电机无法报纸同步协调转动。

图8 不同协调控制方式下双电机转速偏差随时间的变化示意图
3)耦合控制下受到干扰的电机其自身的转速几乎不受影响,双电机的转速始终保持在同一值,不同协调控制方式下双电机的转速偏差可排为:并行控制>主从控制>耦合控制,由此充分说明了耦合控制下转速调节器削弱双电机转速差值的有效性和及时性。
[1]王腾飞.基于无源性的异步电机无速度传感器控制系统的设计[D].兰州:兰州交通大学,2016.
[2]单长帅.双电机齿轮同步驱动系统转矩均衡控制[D].天津:天津工业大学,2016.
[3]袁天清,王双翼.发电厂泵用大功率交流电机变极无差调速系统研究[C]//中共沈阳市委、沈阳市人民政府.第十二届沈阳科学学术年会论文集(理工农医).中共沈阳市委、沈阳市人民政府,2015(6):78-79.
[4]何浩,胡吉全,孙振宁.双动力起升驱动系统的控制研究[J].起重运输机械,2015(5):21-24.
猜你喜欢
防爆电机(2022年1期)2022-02-16
河北画报(2021年2期)2021-05-25
数学小灵通(1-2年级)(2020年9期)2020-10-27
煤矿机电(2019年6期)2020-01-13
当代贵州(2019年41期)2019-12-13
电子技术与软件工程(2019年15期)2019-12-03
自动化学报(2017年4期)2017-06-15
中国共青团(2015年7期)2015-12-17
中国塑料(2015年3期)2015-11-27
空间控制技术与应用(2015年2期)2015-06-05
