基于真实场景库导航终端虚拟测试技术的研究
2018-03-16 12:50齐宁郑建立陈新
科学与财富 2018年2期
关键词:高精度
齐宁+郑建立+陈新
摘 要:随着全球卫星导航定位技术的快速发展,以及我国北斗导航系统建设的日益完善,各式各样的导航终端定位设备呈现快速增长态势,并被广泛地应用于国民经济的各个领域。因此,亟待一种全新的测试方法能更快速、更准确、更全面地反映导航终端性能与功能。本文对基于真实场景库的导航终端虚拟测试技术的实现原理与技术难点做了系统性介绍,分析了相关测试技术的关键性问题,最后归纳了当前测试服务所面临的主要挑战并对未来的应用前景进行了展望。
关键词:真实场景库;导航终端;高精度;虚拟测试
0 引言
纵观世界,“全球导航卫星系统”主要包括最常使用的美国GPS,以及俄罗斯格洛纳斯(GLONASS)、欧洲伽利略(GALILEO)和中国的北斗(BeiDou)四大卫星导航系统。其中,美国的GPS和俄罗斯的格洛纳斯是目前世界上最主要的两大定位系统[1~2]。而北斗卫星导航系统是我国自主建设的卫星导航定位系统,并分别与俄罗斯格洛纳斯(GLONASS)和美国GPS达成卫星导航系统之间的兼容互操作协议。北斗卫星导航系统是最新的定位系统,但同时也是发展最快的定位系统。我国已完全建成由14颗组网卫星和32个地面站天地协同组网运行的北斗二号系统[3],2017年11月我国成功发射北斗三号第一、二颗组网卫星并完成测试和入网验证,2020年前后,我国将建成由5颗地球静止轨道卫星和30颗非地球静止轨道卫星组成的北斗卫星导航全球系统,也就是北斗三号,为全球用户提供全天候、全天时、高精度的定位、导航和授时服务[4]。
伴随着北斗卫星导航系统的快速发展,卫星导航终端设备的生产规模也在不断扩大,甚至出现井喷现象[4],近年,北斗高精度应用深入渗透到交通运输、车船监管、电力、农业、渔业、公安、林业等诸多行业和领域;同时,大众市场获得更加广泛的拓展,在监控跟踪类可穿戴式设备、移動健康医疗、城市快递、互联网汽车、电动自行车安防等细分领域获得重大突破,北斗高精度应用已经成为主流方案,大众市场正在向高精度标配化发展。面对数量巨大、种类繁多、应用场景复杂的导航终端市场,模拟真实环境,构建抗干扰和抗欺骗检测的认证环境,是提升导航终端产品质量,真实反映导航终端的性能和功能[3],实现稳定、可靠的高精度定位、授时的保证,也是建立应用测试服务行业标准规范的保证。可见,导航终端测试技术作为卫星导航系统服务的最终测试环节,不仅是建立导航终端标准市场规范的重要载体,更能创造出巨大的社会效益和经济效益。
1 真实场景库虚拟测试
基于真实场景库的虚拟测试技术就是以大规模真实场景数据(或称之为大数据)为核心,结合卫星信号模拟器测试和真实路跑信号测试的测试特点,构建高可用高精度定位导航测试验证平台。
卫星信号模拟器测试是通过构建数学模型设置预定场景的性能参数,并仿真卫星轨道模拟信号传输模型,为导航终端提供可信赖的测试平台。实际测试发现这种测试方式的确可以得到非常优异的性能参数,但测试信号、场景以及载体动态的定义过于理想化,与实际信号测试得到的测试结果差异很大。真实路跑信号测试就是在实际环境下由车辆搭载终端进行实地实时测试。这种方式反映了终端的真实性,还可以反映载体的运动状态,但这种测试方法存在的问题是成本比较高,测试结果重复性差[2]。
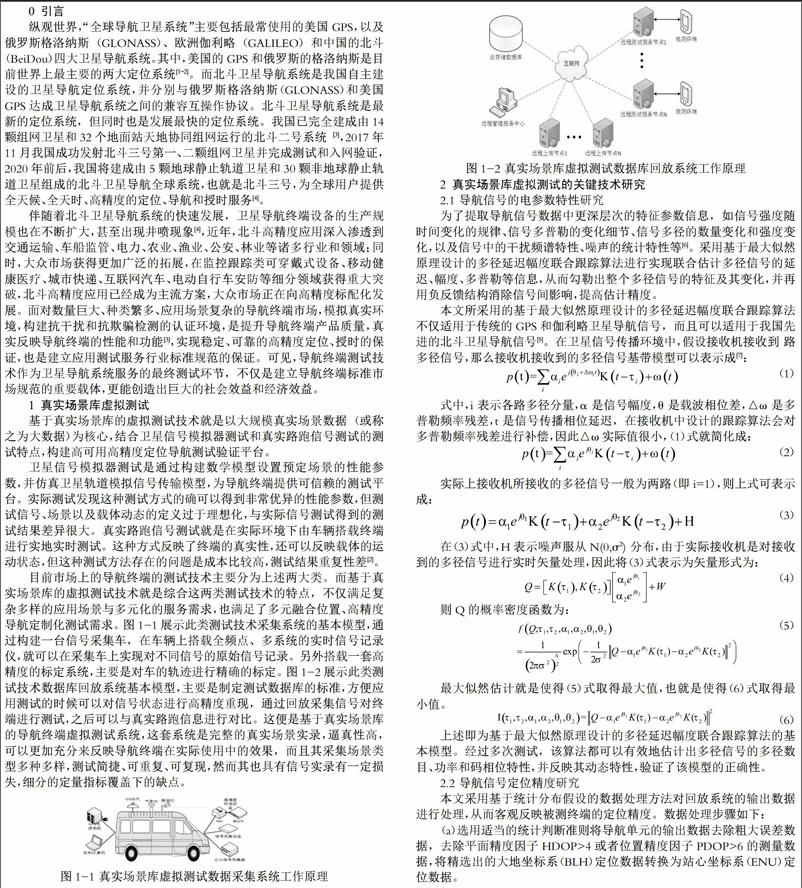
目前市场上的导航终端的测试技术主要分为上述两大类。而基于真实场景库的虚拟测试技术就是综合这两类测试技术的特点,不仅满足复杂多样的应用场景与多元化的服务需求,也满足了多元融合位置、高精度导航定制化测试需求。图1-1展示此类测试技术采集系统的基本模型,通过构建一台信号采集车,在车辆上搭载全频点、多系统的实时信号记录仪,就可以在采集车上实现对不同信号的原始信号记录。另外搭载一套高精度的标定系统,主要是对车的轨迹进行精确的标定。图1-2展示此类测试技术数据库回放系统基本模型,主要是制定测试数据库的标准,方便应用测试的时候可以对信号状态进行高精度重现,通过回放采集信号对终端进行测试,之后可以与真实路跑信息进行对比。这便是基于真实场景库的导航终端虚拟测试系统,这套系统是完整的真实场景实录,逼真性高,可以更加充分来反映导航终端在实际使用中的效果,而且其采集场景类型多种多样,测试简捷、可重复、可复现,然而其也具有信号实录有一定损失,细分的定量指标覆盖下的缺点。
2 真实场景库虚拟测试的关键技术研究
2.1 导航信号的电参数特性研究
为了提取导航信号数据中更深层次的特征参数信息,如信号强度随时间变化的规律、信号多普勒的变化细节、信号多径的数量变化和强度变化,以及信号中的干扰频谱特性、噪声的统计特性等[6]。采用基于最大似然原理设计的多径延迟幅度联合跟踪算法进行实现联合估计多径信号的延迟、幅度、多普勒等信息,从而勾勒出整个多径信号的特征及其变化,并再用负反馈结构消除信号间影响,提高估计精度。
本文所采用的基于最大似然原理设计的多径延迟幅度联合跟踪算法不仅适用于传统的GPS和伽利略卫星导航信号,而且可以适用于我国先进的北斗卫星导航信号[5]。在卫星信号传播环境中,假设接收机接收到 路多径信号,那么接收机接收到的多径信号基带模型可以表示成[7]:
式中,i 表示各路多径分量,α 是信号幅度,θ 是载波相位差,△ω 是多普勒频率残差,t 是信号传播相位延迟,在接收机中设计的跟踪算法会对多普勒频率残差进行补偿,因此△ω实际值很小,(1)式就简化成:
实际上接收机所接收的多径信号一般为两路(即i=1),则上式可表示成:
在(3)式中,H表示噪声服从N(0,σ2) 分布,由于实际接收机是对接收到的多径信号进行实时矢量处理,因此将(3)式表示为矢量形式为:
最大似然估计就是使得(5)式取得最大值,也就是使得(6)式取得最小值。
上述即为基于最大似然原理设计的多径延迟幅度联合跟踪算法的基本模型。经过多次测试,该算法都可以有效地估计出多径信号的多径数目、功率和码相位特性,并反映其动态特性,验证了该模型的正确性。
2.2 导航信号定位精度研究
本文采用基于统计分布假设的数据处理方法对回放系统的输出数据进行处理,从而客观反映被测终端的定位精度。数据处理步骤如下:
(a)选用适当的统计判断准则将导航单元的输出数据去除粗大误差数据,去除平面精度因子HDOP>4或者位置精度因子PDOP>6的测量数据,将精选出的大地坐标系(BLH)定位数据转换为站心坐标系(ENU)定位数据。
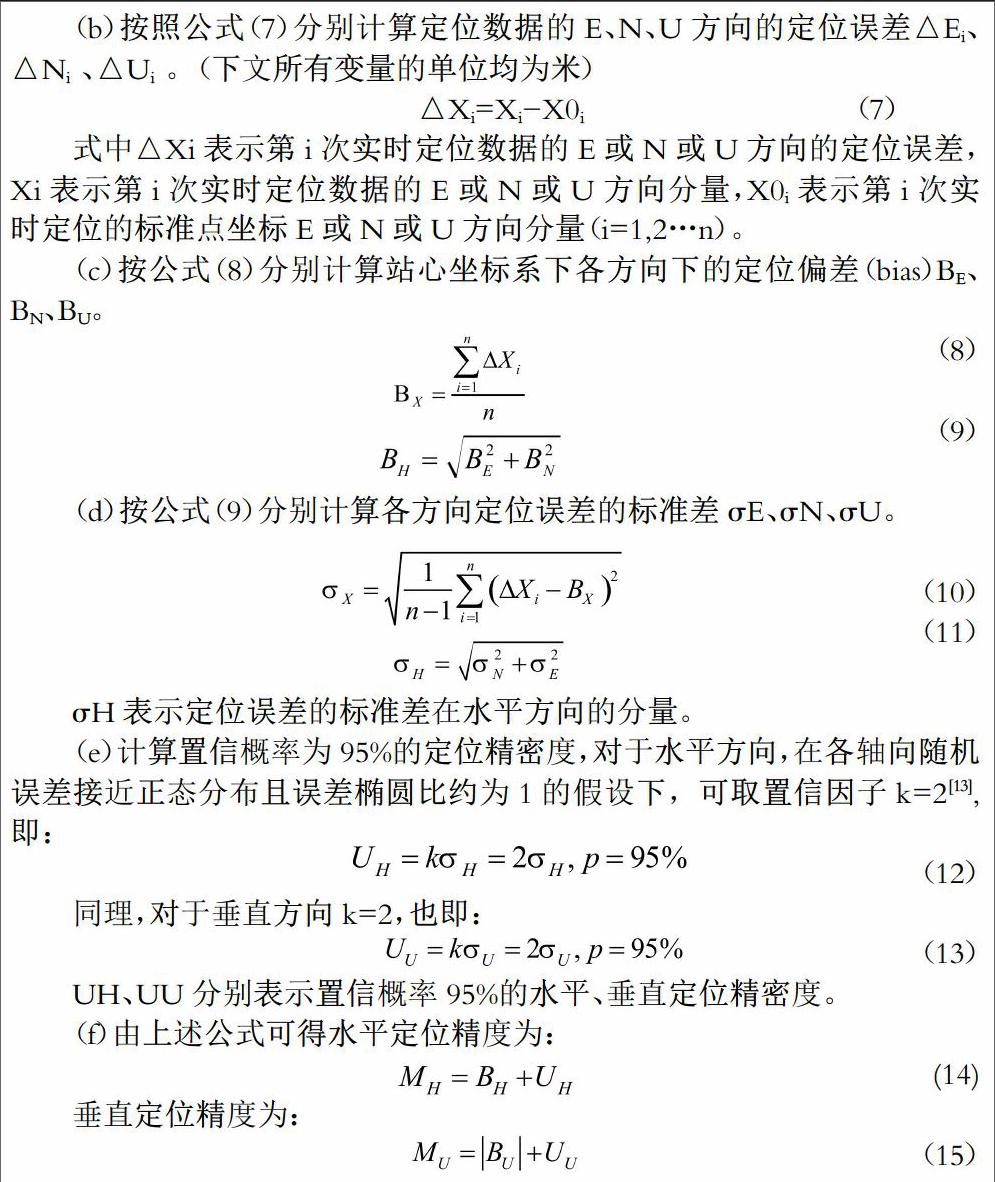
(b)按照公式(7)分别计算定位数据的E、N、U方向的定位误差△Ei、△Ni 、△Ui 。(下文所有变量的单位均为米)
式中△Xi表示第i次实时定位数据的E或N或U方向的定位误差,Xi表示第i次实时定位数据的E或N或U方向分量,X0i表示第i次實时定位的标准点坐标E或N或U方向分量(i=1,2…n)。
(c)按公式(8)分别计算站心坐标系下各方向下的定位偏差(bias)BE、BN、BU。
σH表示定位误差的标准差在水平方向的分量。
(e)计算置信概率为95%的定位精密度,对于水平方向,在各轴向随机误差接近正态分布且误差椭圆比约为1的假设下,可取置信因子k=2[13],即:
在实际应用中,基于统计分布假设的数据处理方法可以提供精确的定位精度值,从而可以有效的反映导航终端的定位性能。目前,针对真实场景库虚拟测试系统关键性技术的研究不仅为卫星导航终端相关产品的测试提供了一个真实场景数据的测试平台,而且有效的促进了对多径抑制算法、高精度导航定位算法等高性能算法的开发,并降低了定位终端的测试周期与测试成本。
3 总结
目前相关的测试技术的应用实现依然面临诸多挑战,主要有采集回放面临高精度产品测试基准数据的标定与时间同步问题[1];当前的测试要求、方法针对不同产品各不相同,差异大、共性少,没有形成完整体系;产品指标体系内容多样,在符合指标要求的基础上如何进一步综合评估优劣没有评价标准,难以综合评价。然而相信随着基于真实场景库导航终端虚拟测试技术的发展,完全能够创建一套测试方法科学性、数据真实性、结果可信性、分析准确性完整终端测试系统,来更加充分来反映导航终端在实际使用中的效果。如果未来最终能实现真实场景信号的重构,同时侧重场景的深度挖掘,将场景分类研究得非常充分,并将不同终端传感器进行集成、采集、回放,就能完全替代当前的实际场景测试,可极大规模地降低企业测试成本。
参考文献:
[1]石磊,孙祥福,李腾.北斗授时原理及终端性能检测技术[J].环境技术,2017,35(02):11-14.
[2]王田,夏天,张书锋,陈强,彭明.导航终端测试技术研究综述[J].计测技术,2015,35(04):6-9+14.
[3]刘思睿. GNSS接收机性能综合测试技术研究[D].北京化工大学,2013.
作者简介:
齐宁(1993-),男,汉族,硕士研究生。主要研究方向:数据处理、测试技术。
猜你喜欢
电子测试(2018年23期)2018-12-29
测控技术(2018年12期)2018-11-25
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
制造技术与机床(2017年2期)2017-05-04
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
山东冶金(2015年5期)2015-12-10
深空探测学报(2015年3期)2015-12-07