实景建模技术在水利工程中的应用探索及精度分析
2018-03-19 06:00张国卿朱庆利
水利规划与设计 2018年2期
张国卿,朱庆利,唐 芳
(山东省水利勘测设计院,山东 济南 250014)
实景建模技术是近几年测绘领域发展起来的一项逆向建模技术,该技术利用有足够重叠度的相片,完整准确的建立被拍摄物体的三维立体模型。在工程领域,多被用于工程区域的多角度展示、施工进度汇报、设计意图表达等方面。
虽然实景模型的可视化功能已经比较完善,也被广泛应用。但笔者通过实景建模技术在工程实践中发现了普遍存在的两个问题:一是外业实施和精度评定方面没有明确的规范可查,导致在目标精度范围内,原始数据出现冗余的问题,不仅增加了成本,还拖慢了后续处理工效;另外实景成果目前还主要停留在展示阶段,实景模型还没有真正信息化,或者说如果将实景模型作为测绘资料参与BIM设计过程,其功能性还不完善。
针对上述两个问题,笔者结合我院的项目类型和BIM解决方案确定了两个探索方向:一是在确保实景模型达到计划精度的前提下,怎样有效的降低原始数据的体量,减少数据处理的时间;二是对实景模型的可拓展性和可编辑性进行探索,让实景成果尽快参与到BIM设计过程中。
笔者为全面详实的获取实验数据,选取了我院独立完成的3项具有代表性实景建模案例进行探索。
(1)宋庄分水闸枢纽工程区(黄水东调工程)(简称宋庄区),实景建模范围为:东西方向约600m,南北方向约400m;实景模型面积约为0.23km2;计划精度达到比例尺1∶500地形图精度。
(2)加压提升泵站枢纽工程区(简称加压区)(黄水东调工程),实景建模范围为:东西方向约700m,南北方向约1000m;面积约为0.74km2;计划精度达到比例尺1∶500地形图精度。
(3)莒县涉水涉地资金整合项目工程区(简称莒县区),实景建模范围为:东西方向1400m,南北方向2000m;实景模型面积约为2.5km2;计划精度达到比例尺1∶2000地形图精度。
1 技术路线
1.1 原始数据采集方案
随着实景建模技术的不断发展,原始数据的来源也多种多样,除了通过无人机倾斜摄影测量获取之外,手持相机拍摄相片和视频、扫描仪形成点云等数据都可以参与模型的建立。本文讨论的三项实景案例均是采用无人机倾斜摄影的解决方案。
相较于工测和航摄等传统数据采集方式,倾斜摄影测量具有一定的优势,这些优势反映在效率高、成本低和安全性高等几个方面。
效率方面,在控制点布设密度要求倾斜摄影测量方面低于传统摄影测量。理论上,实景模型绝对定向最少需要三个控制点,每个控制点最少有三张相片覆盖即可。虽然实际操作过程中,无论在控制点精度,还是飞行控制上无法达到理想状态,但是与传统航测严格的控制点布设相比,倾斜摄影测量的前期准备工作时间已大大缩短。
成本方面,随着无人机技术的大力发展,旋翼无人机的采购成本已有大幅度降低;并且在镜头方面,实景模型的后处理软件Context Capture相机库集成了大量普通量产相机的镜头参数,利用这些相机采集的相片可以直接做为数据源,照片附带的内方位元素可直接被软件读取使用。实景建模后处理软件对于数据来源的开放性,提高了设备采购的自由度,节约了成本。
安全性方面,旋翼无人机飞行速度慢、飞行高度低,起降方式为垂直起降。这是旋翼无人机在安全性方面的优势。
1.2 实景模型后处理方案
实景建模的主流软件目前有三种:ContextCapture、PhotoScan和Pix4Dmapper。见表1。

表1 三种软件对比
其中,ContextCapture生成的模型效果最为理想,且后续工作量较低。我院三维协同设计方案采用的是此解决方案,生成的实景模型可以得到平台底层软件的支持。所以,实景模型的后处理软件选用该平台下的ContextCapture,而应用拓展软件也选用Descartes。
确定了外业采集方案和后处理应用软件后,我们制定了实景建模的工作流程,如图1所示。

图1 实景建模的工作流程
2 实景模型建立
2.1 外业采集
实景模型的原始数据决定着该模型的精度和处理工作的复杂度,在实景模型的质量和生产效率上取平衡并不容易。在没有规范指导的情况下,需要依靠大量经验值支撑。结合上文提到的3个实景案例,阐述针对不同项目情况采取的解决方案。
宋庄区地处平原,是水利工程的分水口,地面附着物纷繁复杂。此项目是应用倾斜摄影测量技术初期进行实施的,没有经验指导。为了取得最好的效果,将飞行高度设置为80m,设备采用Micro-Drones4-1000型旋翼无人机,搭载2个SONY ILCE-6000相机组成的双鱼镜头,共飞行了三个架次完成数据采集,采集的相片的地面分辨率±1cm。宋庄区实景模型达到了计划精度,但是在处理过程中发现原始数据体量太大,参与建模的照片共计3933张,存储空间超过40G,严重拖慢了实景模型的生产速度。
实施加压区的实景建模时,我们根据不同地貌复杂程度采用了不同的采集方式。加压区以水库大坝和平缓的地面为主,但在测区东南角有一处村庄在建模范围内。所以在数据采集过程中,第一架次主要针对村庄进行数据采集,飞行高度为100m,设备采用MicroDrones4-1000型旋翼无人机,搭载2个SONY ILCE-6000相机组成的双鱼镜头;第二和第三架次,主要针对大堤和平缓的地面进行数据采集,飞行高度为150m,镜头换为单个SONY ILCE-7R相机。通过精度分析,加压区达到了精度,并且原始数据的体量大大缩减。加压区的建模面积是宋庄区的3倍,但是相片数不足宋庄区的70%,在后处理过程中,生产效率明显得到提高。
在实际生产过程中,精度较低、范围较大的地形图也是必不可少的,类似比例尺1∶2000的地形图。莒县区的建模是针对这类生产需求的探索,该测区是以前获取的传统航空摄影测量照片,飞行高度240m,设备采用UX5 HP型固定翼无人机搭载单个SONY NEX-5相机,共拍摄相片649张。在测区有效控制点范围内达到了计划精度。莒县区利用实景建模的后处理技术对垂直摄影相片进行处理,拓展了实景数据采集思路。
2.2 数据处理
2.2.1 原始数据导入
原始数据不仅指照片,还包括内方位元素信息、外方位元素信息、控制点信息等,这些信息是可以直接导入到软件中。其中内方位元素通常被称为相机文件,外方位元素被称为POS文件。在导入控制点信息时需要选取相应的坐标系统,导入成功后还要进行刺点的工作。刺点工作的完成度越高,生成的实景模型的投影越精确,高完成度是指将所有带控制点的相片都进行刺点。
2.2.2 空三解算
空三解算是航摄测量的关键步骤,该步骤能精确的计算每张照片的外方位元素,其平差结果是考量实景模型精度的重要标准。
虽然理论上最少三个控制点,每个控制点最少三张相片覆盖即可进行空三解算,但实际操作中,控制点的数量和采集精度对实景模型的精度有很大影响,所以控制点应大量均匀布设。关于布设密度,暂时没有相应的规范可查,笔者也正积极通过各种案例和实验进行探索,目前还没有值得参考的结论。
2.2.3 模型生成
Contextcapture根据空三解算的结果自动生成三维实景模型。在生成模型之前,可以选择输出格式,可以是三维mesh,彩色点云或者是正射影象等。最终模型的生成是个反复的过程,对于需要纠正的模型,可以先导入Descartes软件中,进行精确的修正后,再导回Contextcapture软件,重生成新的模型。至此,三项实景模型通过上述方式建立完毕。
3 实景建模的精度分析与技术总结
3.1 精度分析
对于实景模型的精度评定,暂时没有相关的精度评定标准,业内习惯将相片分辨率和空三解算的平差结果作为实景的精度评定标准。
本文从与实测点进行比较的角度分析讨论精度问题,且只针对上文中提到的三项实景建模的案例而言,得出的结论并不具备广泛性和普遍性。
精度对比过程中首先理清了一个思路,相较于传统的二维测绘图将精度分为平面精度和高程精度而言,实景模型已经将这两项统一到三维坐标系中,变成一项精度。在宋庄区和加压区两项实景范围内,进行了比例尺1∶500地形图的实地采集。通过叠加和坐标的提取等操作,发现无论是同名高程点还是地物重合度,实景模型与1∶500地形图的差值都在厘米级范围内,甚至发现了二维图中实测点位准确,绘图出现操作偏差的情况。莒县区实景模型比较特殊,测区内只有少量的实测地形点,分布比较散乱,测区其中一角没有可用的控制点参与空三,且空三解算出的平差结果不理想。通过比较同名高程点差值,出现两种情况:在缺少控制点的测区一角处地形点差值在±0.5m左右,而控制点范围内的地形点差值都在±0.15m以内。
通过以上的精度分析,笔者认为在三处测区采用的解决方案能满足精度要求,但不是最高效的方案,还需进一步的实验。此外,通过莒县区建模发现:虽然在不设置控制点的情况下,也能建立实景模型,但生成模型不是一个刚体,控制点能够让模型产生形变,所以在必要位置的布设控制点是不可或缺的。
3.2 技术总结
3.2.1 关于外方位元素
外方位元素是指相机曝光时,镜头的瞬时位置和姿态,而大多数的原始外方位元素是不准确的,这其中有两个原因:一是大部分相片的外方位元素信息不完全,普通无人机没有惯性导航,无法记录曝光时的姿态。另一原因是,即便能记录全面的外方位元素,也不能保证外方位元素与照片是一一对应的。笔者遇到一个案例,同一张相片作为原始数据输入的外方位元素与经过空三解算后的外方位元素不一致,并且根据照片拍摄的内容不难发现,作为原始数据的外方位元素是不正确的。
所以,在导入外方位元素的经验是:原始的外方位元素可以参考,但不是绝对准确的,在外方位元素的获取方式和精度上,无需耗费过大的精力,可通过后续的空三解算获得准确的外方位元素。
3.2.2 关于刺点工作
空三解算之前需要进行刺点的准备工作,但在Context Capture软件中过滤照片费时费力。通过实验发现,进行两次采样率不同的空三解算可解决这个问题。先对关键的控制点进行刺点,比如测区的角点和中心点,带有这些控制点的相片不必一次刺全。随后,进行一次低采样率的空三解算,因为低采样率的空三解算速度较快,并且能帮助发现问题、排除问题。计算完成后,回到刺点的工作界面,发现带有控制点的所有照片已经被筛选出来。最后,再进行正常全面的刺点工作和高采样率的空三解算即可。
4 实景模型信息提取
笔者将上述三处实景模型导入Descartes软件,结合BIM设计需求,在实景模型信息提取利用方面进行了摸索。
4.1 地面附着物剥离
实景模型实现了所见即所得,但实景模型的地面附着物是以真实尺寸出现在地面上的,而正常的二维测绘图是将各种地面附着物投影到地面的成果,所以将地面附着物与地面剥离是实景模型参与设计计算的一个障碍。笔者通过将实景模型转换为分类的点云成果,实现了地面与地面附着物的剥离,如图2所示。

图2 实景模型转换为分类的点云成果图
4.2 断面查看
断面查看功能是指通过设置断面线的方式,可以实现该处断面的查看,甚至是断面线处前后地面附着物立面的查看和导出。另外,还可以设置中心线作为路径,按桩号提取断面,如图3所示。
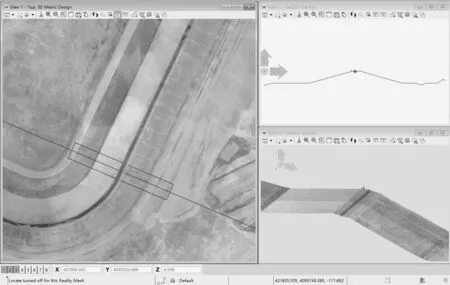
图3 景模型断面查看功能
4.3 照片导航
照片导航功能是指直接调用具有准确外方位元素的建模照片,当实景模型对于细节还原度不够时,可以通过设置兴趣点的方式筛选出内容包含兴趣点的照片,并调用查看。此功能某种意义上来说扩展了实景模型的可视化精度,如图4所示。
4.4 实景模型分类显示
相较于二维图或者GIS图,实景模型的分类或者分图层显示功能还有待遇进一步开发。笔者通过将实景模型与GIS数据、实测地形图相结合的方式,如图5所示,实现了实景模型对专题要素的显示,扩展了可视化方式。
5 结语
通过对三处案例的分析,在实景模型的生产处理经验和与BIM设计过程结合上,取得了一定的经验和成果。针对常用的比例尺精度标准,形成了可以参考的数据采集经验值;在实景模型的信息提取方面,也满足部分设计需求。
实景建模技术已从概念走向应用,并且正在经历从三维可视化到信息化的巨大转变。目前实景模型包含的信息主要是地理信息,还没有与其他专业领域信息很好的结合。将来实景模型与大数据的结合、提取、分析利用,可能是整个行业的探索方向,实景建模技术的探索之路任重而道远。
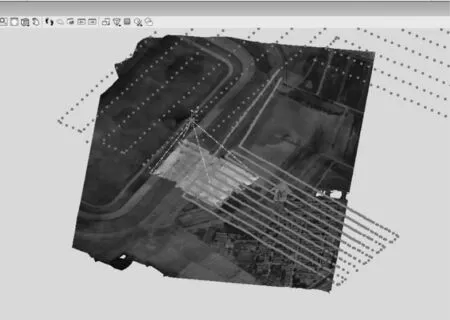
图4 实景模型照片导航功能
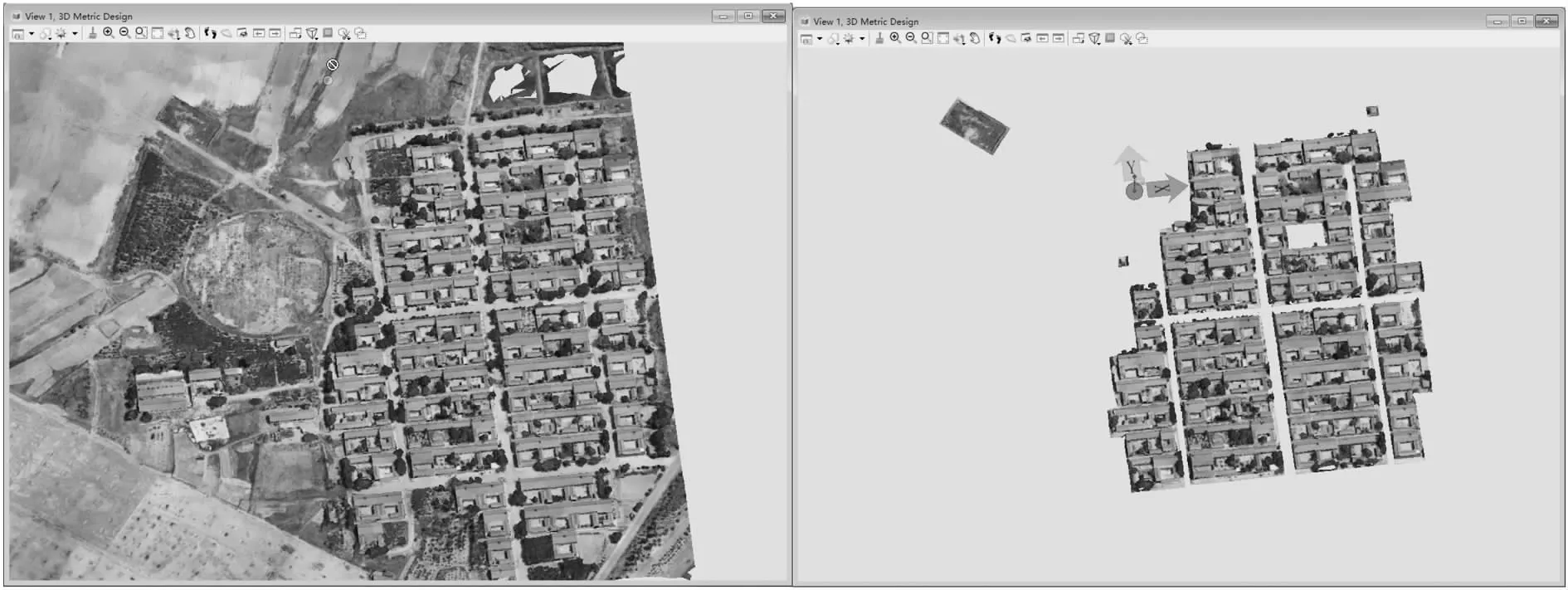
图5 实景模型与GIS数据的结合
[1]高英.“BIM+”跨界应用开拓智慧水利[J].水利规划与设计,2017(09):154-157.
[2]潘亮,王海珍.三维实景建模技术及运用 下[J].影视制作,2016(02):47-51.
[3]冯茂平,杨正银,张秦罡.基于小型多镜头航摄仪的无人机倾斜摄影技术在实景三维建模中的应用[J].测绘通报,2017(S1):5-7.
[4]刘尚蔚,王维洋,魏群.三维实景建模技术及其应用[J].中国水运(下半月),2016(11):132-134.
[5]毛拥政,补舒棋,付登辉,等.BIM技术在引汉济渭工程三河口水利枢纽勘察设计中的应用[J].水利规划与设计,2017(09):158-161.
猜你喜欢
China Report Asean(2022年8期)2022-09-02
江苏安全生产(2022年5期)2022-06-16
华人时刊(2021年23期)2021-03-08
物联网技术(2020年12期)2021-01-27
作品(2020年4期)2020-05-11
汽车零部件(2017年4期)2017-07-12
课堂内外·创新作文小学版(2017年1期)2017-06-01
北方音乐(2017年4期)2017-05-04
中国教育技术装备(2015年4期)2015-03-01
中国石油石化(2013年5期)2013-05-03