料斗称重系统的仿真分析及试验研究
2018-03-21 05:47张建立叶平坤
机械设计与制造 2018年3期
杨 健,张建立,叶平坤
(郑州大学 机械工程学院,河南 郑州 450001)
1 引言
作为一种重要的计量设备,称重系统已被广泛应用于炼铁、炼钢、煤炭、运输与物流等众多行业[1]。计量在生产和科研中扮演着非常重要的角色。目前,采用先进的技术对固体颗粒物料进行准确计量是企业生产管理中非常重要的一个方面。固体颗粒物料在储存、配料、加工时都需要计量,而且大部分是在连续动态情况下进行的,因此如何精确、快速地计量就成为了一个问题[2]。
因此需要,需要针对不同的称重环境选用合适的称重系统。高炉炼铁的过程中,从最开始的原料焦炭和铁矿石等的采购、炼铁原料烧结球团颗粒的制备以及原料在送入高炉之前,都需要对各种相应的物料进行计量称重,这些过程中就会用到各种样式的称重系统。
所研究的称重系统,主要由料斗和多个传感器构成,应用在钢铁企业,用来称量进入高炉之前的烧结矿颗粒等的重量。称重完毕后,需将重量值上传到计算机上。实际控制中,当控制系统接收指令对传感器进行数据采样的时候,发现在物料全部落入料斗后立马进行采样的话,料斗由于受到物料的冲击,短时间内会有一定程度的振动,会造成称重数据的严重失真。如果采样的时间设置的太久,虽然称重数据准确,但检测的效率会有所降低。因此需要对称重系统进行仿真分析,以确定其到达稳态状态的时间。同时,进行了一些实际的试验来进行验证。通过对试验结果的分析,观察达到稳定状态时,实际称重系统所需的时间,从而确定采样时间,进而指导后续的控制过程。
2 称重系统数学模型的建立
称重系统主要包括称重传感器、称重料斗、称重显示仪表、信号隔离装置等。首先建立仿真模型,对系统进行简化,得出称重系统的力学模型,即为一个有阻尼器、弹簧和质量块组成的二阶系统,如图1所示。
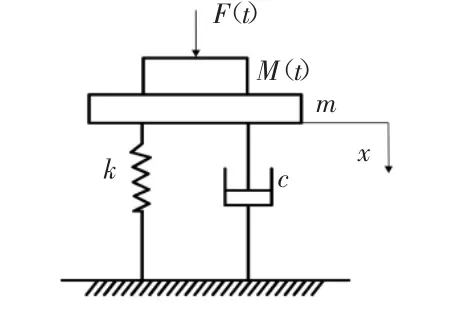
图1 称重系统的力学模型Fig.1 Mechanical Model of the Weighing System
对力学模型进行受力分析,建立称重系统的数学模型。弹性力(k为弹簧的弹性系数,x为质量块偏离其平衡位置的位移):

阻尼力(c为阻尼系数,v为质量块的速度);

假设系统不再受到其他外力的作用,可利用牛顿第二定律写出该振动系统的振动方程:

式中:a—加速度。
由上图可以列出系统的牛顿第二定律方程:

将式(1)、式(2)、式(3)代入式(4)中得:

式中:M(t)—物料的重量;m—称重料斗的重量;c—称重系统的阻尼系数;k—称重系统的刚度系数;x—称重料斗相对于平衡点的位移;g—重力加速度;F(t)—物料下落的冲击力。
式(5)表征的是位移量x对物料质量的关系,由于用到的是应变式传感器,每一个微小位移都对应的有一个微小的电压,故式(5)也可以看成是电压与物料质量的关系。
由上面推导的公式可以看出,随着物料质量M(t)的变化,系统是一个时刻都在变化的非线性的系统,无法直接对其进行分析,需要再次进行理想化的简化。所以作此假设,假设在一个很小的时间里,落入称重料斗里面的物料是一定的,即M(t),F(t)为一个常数,将两者之和设为一个整体,记为G,此时方程就成为了一个线性的方程,可以进行随后的处理。
此时式(5)就变为了下列方程:

即为

对上式进行拉氏变换可得:

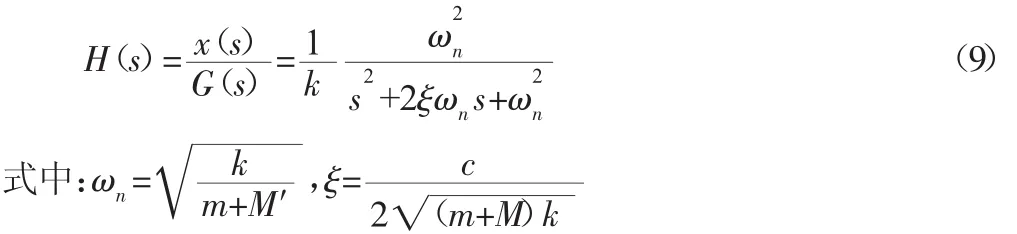
整理可得此称重系统数学模型的传递函数:
3 Simulink仿真
称重系统的数学模型已建立完毕,可以通过Matlab Simulink模块对该二阶系统进行建模仿真。
Simulinnk是著名的、应用普遍的动态系统仿真工具,能够很直观、快捷地构建过程控制系统的方框图仿真模型,同时可以进行仿真结果的可视化分析,是进行过程控制系统设计和参数整定的首选仿真工具。它包含了许多内置的基本库模块,用户可以通过这些模块的连接构成系统的模型,进而进行仿真[3]。
典型二阶系统在阶跃信号输入的作用下的仿真结构图[4],如图2(a)所示。根据此图在Simulink中画出对应的仿真模型。实际仿真时需要对所用的各个模块进行参数的设置,由于该系统的固有频率、阻尼比等参数的准确数据尚且未知,已知固有频率跟刚度和质量有关,质量为已知量,由文献[5],可以大致取刚度为一个固定的值,由此计算出固有频率的值为82.83。由机械手册可以查出ξ<1[6]。故可取ξ为一系列小于1的数,进行仿真,以观察仿真结果。
在 Simulink中按照图 2(a)建立仿真模型图,如图 2(b)所示。对各个模块中的参数进行设置,通过改变ξ的取值,分别取为0.1,0.25,0.5,0.75,1,将所得到的数据在一张图上显示出来,如图3(a)所示。

图2 Simulink仿真模型Fig.2 Simulation Model Based on Simulink

图3仿真结果Fig.3 Result of Simulation
图3 (a)中ξ取值从上到下,由小到大。可以看出固有频率一定时,阻尼比ξ的取值越大,系统单位阶跃响应的超调量越小,但上升时间加长,振荡时间越短,系统达到稳态的时间越短。可见,阻尼比的大小关系到系统振荡过程的时间长短。因此,取ξ=0.707[7],再次进行仿真,仿真结果,如图3(b)所示。由图可以看出在阶跃输入开始到系统稳定,大概经历了500ms,这个时间间隔可以为采样时间的确定提供依据。为了验证仿真的正确性,补充一些实际的试验显得尤为重要。
4 试验
4.1 称重系统的组成
试验所用到的称重系统的组成部分包括:一个已知重量的称重料斗、三个相同规格型号的某品牌s型拉力传感器、一个用于支撑料斗的框架以及六个用于把传感器跟框架和料斗相连的吊挂。称重系统的实物图,如图4(a)所示。图中同时可以看出三个传感器的安装位置。传感器的安装方式,如图4(b)所示。
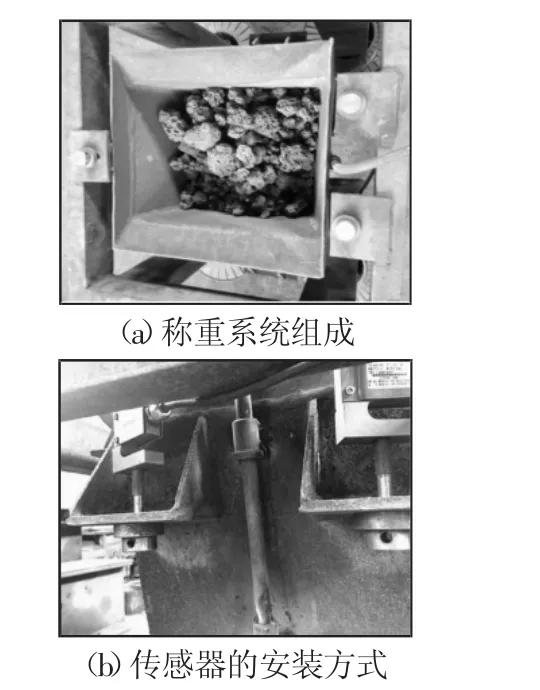
图4 称重系统实物图Fig.4 Physical Map of the Weighing System
4.2 称重试验
试验所用到的装置,如表1所示。将下表中的仪器按照一定的顺序和接线方式进行连接,连接完毕后需进行测试,保证开始实验时能准确地采集到传感器的输出信号。硬件连接图,如图5所示。
试验所用的物料为粒度不均匀的烧结矿颗粒。
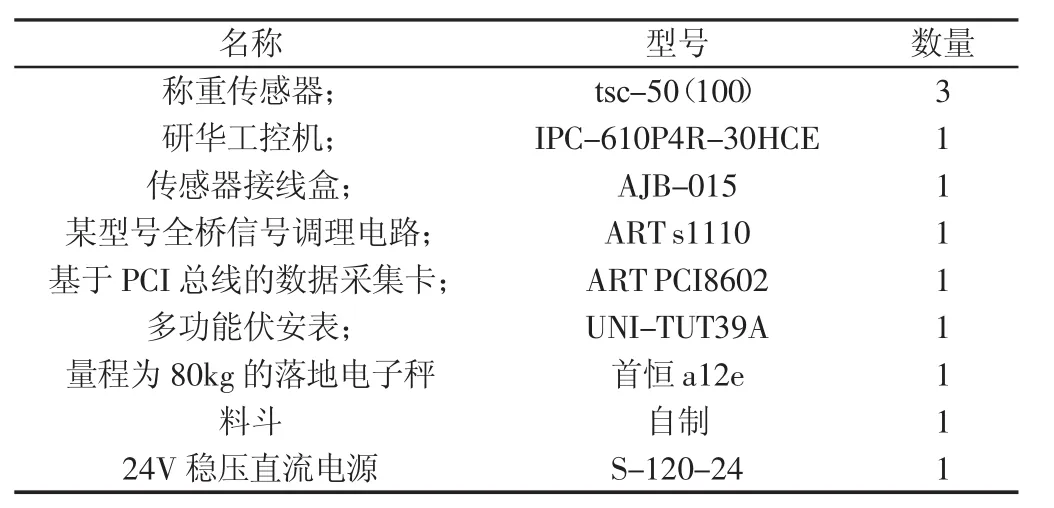
表1 实验仪器Tab.1 Instruments of Experiments

图5硬件连接图Fig.5 Diagram of the Hardware Connection
图5 中,称重系统由于安装了三个拉力传感器,故有三根信号输出线,将其连接在与传感器配套的接线盒的三个接线接口上。接线盒有一条信号线输出,直接接在全桥调理电路的对应接线柱上,通过特制的信号线连接到采集卡上,最后将采集卡安装在工控机的对应插槽中。在工控机上安装的有跟采集卡匹配的驱动软件,可以对数据进行采集、显示和保存。实验过程:硬件连接完毕,试验开始。
为了尽可能准确地模拟生产现场称重的实际情况。试验方案设计如下。
方案为:让一定质量的物料在瞬间落进料斗内,用来模拟一个阶跃信号。为了实现该目的,故特意增加了一个料斗,用于向称重系统加料。具体做法是:用落地称称够足够重量的物料,倒入料斗中,随后用行吊将其吊起在称重系统正上方一定高度,通过手动控制料斗下侧仓门的开启,实现物料的快速下落。
试验开始,先在采集软件界面设置好参数,比如采集通道、采样频率、文件名字等,准备就绪后点击开始采样的同时,打开料斗下侧的仓门,物料随重力瞬间落入料斗,等待一定的时间,关闭采样。此为一次试验的过程。为保证采集到数据的准确性,试验重复进行三次。随后改变采样频率,同样的试验再次进行三次。试验明细,如表2所示。根据采样定理[8],为保证采样后信号的频谱形状不失真,采样频率必须大于信号中最高频率成分的两倍,故试验中采样频率设置的足够大。

表2 试验明细Tab.2 Details of Experiments
实验数据分析:由于该采集软件保存的数据文件不便于后期的数据分析,故将其转换为文本文档,随后通过Matlab中的绘图功能,将数据以图表形式显示。由于所采集的数据点过多,数据就不再一一列出。根据试验结果,绘制出的图形,如图6所示。

图6 不同采样频率时的试验结果Fig.6 Results of Experiments when Sampling Frequency is Different
物料瞬间落入料斗,等同于对系统突然施加了一个一定大小的载荷。对系统的突然加载或者突然卸载,可视为施加了阶跃输入。采样频率为5kHz时的实验结果,如图6(a)所示。图中每条曲线分别代表一次试验,三个波峰出现的位置不同,这与人工控制料斗闸门开闭的时间先后有关。
曲线不是平滑的,这是由于做实验所用的烧结矿料大小不一,对料斗的冲击力不同所致。由图形可以看出,忽略一些人为因素的影响,曲线整体趋势类似于一个欠阻尼二阶系统对阶跃输入的响应曲线,有一定的超调,基本没有振荡,这跟仿真过程中阻尼比取值接近于0.707时,图线的趋势是一样的。同时可以从图中看出,从落料开始到系统稳定,三次试验分别都经历了500ms的时间。图6(b)为增大采样频率后,重复同样的试验的结果。鉴于第一组试验的经验,此组时间严格控制了打开闸门的时间,因此这组试验重合度较好。从图中也可以看到类似的曲线走势,时间也是500ms左右。试验结果跟仿真过程基本吻合。
5 结论
(1)通过对应的试验,验证了仿真过程,为后续同种类型的称重系统的仿真提供一定的依据。(2)试验结果表明,所用的称重系统,在50kg物料从落入料斗内开始,大概经过了500ms,系统就达到了稳定的状态,可以直接从图中看出从开始到稳定所需要的时间,为后续采样时间的确定提供了依据。
[1]文常保,高丽红,方吉善,等.基于改进型限幅平均滤波法的高精度称重系统研究[J].传感技术学报,2014(5):649-653.(Wen Chang-bao,Gao Li-hong,Fang Ji-shan.The high-precision weighing system based on the improved amplitude-limiting and average filtering algorithm [J].Chinese Journal of Sensors and Actuators,2014(5):649-653.)
[2]初琦.带式输送机动态称重检测理论与试验研究[D].北京:中国矿业大学,2014.(Chu Qi.The method and experimental research on dynamic weighing of belt conveyor[D].Beijing:China University of Mining and Technology,2014.)
[3]沈辉.精通 Simulink系统仿真与控制[M].北京:北京大学出版社,2003.(Shen Hui.Proficient in Simulink Simulation and Control[M].Beijing:Peking University Press,2003.)
[4]李云海,邢纬,林怀蔚.基于Matlab/Simulink的二阶控制系统仿真研究[J].现代电子技术,2013(12):12-14.(Li Yun-hai,Xing Wei,Lin Huai-wei.Simulation study on second order control system based on Matlab/Simulink[J].Modern Electronics Technique,2013(12):12-14.)
[5]王朝阳,李海滨,韦广梅.NS-WL2型拉压力传感器的机理建模研究[J].新型工业化,2014(6):72-76.(Wang Zhao-yang,Li Hai-bin,Wei Guang-mei.A research of NS-WL2 pressure sensor’s mechanism modeling[J].The Journal of New Industrialization,2014(6):72-76.)
[6]成大先.机械设计手册单行本机械振动机架设计[M].北京:化学工业出版社,2004.(Cheng Da-xian.Single Manual of Mechanical Design about Frame DesignandMechanicalVibration[M].Beijing:ChemicalIndustryPress,2004.)
[7]杨叔子,杨克冲.机械工程控制基础(第五版)[M].武汉:华中科技大学出版社,2005.(Yang Shu-zi,Yang Ke-chong.Foundation of Mechanical Engineering Control (Fifth Edition)[M].Wuhan:Huazhong University of Science and Technology Press,2005.)
[8]陈戈,江勇,梅飞.采样频率对频率测量算法的影响[J].机械设计与制造,2010(9):6-7.(Chen Ge,Jiang Yong,Mei Fei.Influence of sampling frequency on the algorithm of frequency measurement[J].Machinery Design and Manufacture,2010(9):6-7.)
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
天天爱科学(2020年6期)2020-09-10
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
探索科学(2017年4期)2017-05-04
哈尔滨理工大学学报(2016年2期)2016-09-12
全球定位系统(2015年4期)2015-02-28