宽幅相机一体化焦面调整机构设计与精度分析
2018-03-21 05:48谢玉婷贾学志
机械设计与制造 2018年3期
谢玉婷 ,安 源 ,贾学志 ,李 季
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院 研究生院,北京 100039;3.长光卫星技术有限公司,吉林 长春 130051)
1 引言
随着卫星遥感技术的发展,卫星遥感图像在国防安全、国土资源、城市规划等多个领域起到了重要作用,具有广泛的应用前景。由于光学卫星自身的不确定性,要想获得更清晰的图像,必须在光学系统内加入焦面调整机构。一方面,受卫星发射过程中的振动、冲击以及在轨复杂的空间环境的影响,光学系统的焦面会偏离理想成像位置产生离焦;另一方面,空间相机在轨对地成像时,地球自转造成物点在像面上的漂移以及飞行器姿态变化会产生偏流角[1-2]。离焦和偏流角会造成图像不清晰,降低成像质量,为获得高质量的图像需对离焦和偏流角进行补偿。对离焦的补偿通常采用外加调焦机构的方法;对于偏流角的补偿,有安装偏流调整机构和调整卫星姿态两种方式,但是通过对卫星姿态的精密控制实时调偏流的技术在国内尚未正式应用。目前国内通常采用外加独立的调焦和调偏流机构的方法对离焦和偏流角进行补偿,这样会造成占用空间大、质量重、装调困难等问题。长春光机所的柴方茂等人针对这一问题设计了焦面二维精密调整机构,将调焦和调偏流机构设计成一个整体,但该机构存在支撑强度差,仅适用于小尺寸焦面等问题[3]。因此在分析宽幅相机的光学系统的特点的基础上,设计了一套一体化焦面二维调整机构,它具有结构紧凑,定位精度高,易于装调,可实现大尺寸焦面拼接等特点。通常设计的对象是不考虑受力与变形,形状、尺寸绝对精确的理想机构。但理想机构实际上并不存在,受机械制造工艺和装调条件的限制,机构中存在各种误差,如构件的尺寸误差、形状误差以及安装偏心误差等,均会造成机构精度下降、图像补偿效果不理想,因此对机构进行精度分析十分必要,这也是空间相机获取清晰图像的关键因素之一[4]。
2 执行机构方案的选取
2.1 设计原则
该宽幅相机采用的是离轴三反光学系统,它具有大视场、无中心遮拦的优点,但其装调难度大、成本高[5]。通常在该系统中,主镜和三镜位于后背板上,次镜、焦面及焦面调整机构均安装在前板上,但是空间宽幅相机焦面尺寸过大、质量较重,焦面调整机构及折返镜总重约45kg,且系统悬臂过长,这样势必会造成前板受力过大,变形严重,影响系统精度,故在前板上安装一块折返镜,将焦面、焦面调整机构安装在强度更好的后背板,如图1所示。

图1 离轴三反光学系统示意图Fig.1 Schematic of Off-Axis Three Mirror Optical System
2.2 设计指标
相机总体结构及精度指标对焦面调整机构的重量、外形尺寸及各项精度进行了严格约束,要求其重量小于12kg,外形尺寸不超过(350×350×300)mm ,焦面全程晃动量优于 10",调焦定位精度优于0.005mm,空回优于0.01mm;调偏流定位精度优于5",空回优于30"。
2.3 传动方案的选取
相机的调焦和调偏流方案因相机光学系统的不同而不同,常用传动方案[6-7]主要有凸轮传动、丝杠螺母传动和蜗轮蜗杆传动方案,它们各有利弊,比如凸轮传动方案精度高、结构简单,其运动件经过冷焊处理后无冷焊、卡滞现象,但是加工要求高,成本高;丝杠螺母传动方案结构简单、体积小、成本低,但自锁能力差,抗冲击能力弱;蜗轮蜗杆传动方案传动比大,自锁能力好,但是传动效率低。结合本相机的特点,调焦机构和调偏流机构分别选用蜗轮蜗杆—偏心轴、蜗轮蜗杆—丝杠螺母传动方案。调焦和调偏流机构通常采用各自独立的结构,存在占用空间大,质量重,装调困难等问题。基于空间大尺寸焦面的宽幅相机对调焦和调偏流机构的要求及现状,提出了一种一体化焦面二维调整机构,将调焦和调偏流机构设计成一个整体机构,能同时实现调焦和调偏流功能且二维运动互不干涉,既节省空间,减小了质量,又放宽了装调指标,便于装调,且结构中采用同类别的电机和编码器,减小了设计难度、加工周期及成本。
3 一体化焦面二维调整机构设计
一体化焦面二维调整机构主要由调焦单元和调偏流单元组成,如图2所示。其中调焦驱动单元采用蜗轮蜗杆—偏心轴机构,步进电机通过蜗轮副带动偏心轴,使连接在偏心轴上的调焦组件沿直线导轨轴向往复运动,达到调焦目的;调偏流驱动单元采用蜗轮蜗杆—丝杠螺母机构,步进电机通过蜗轮副带动丝杠轴,使连接在丝杠上的螺母沿丝杠轴向平移,进而带动螺母上的拨叉运动,调偏流组件被拨叉带动沿光轴方向转动,达到调偏流目的。
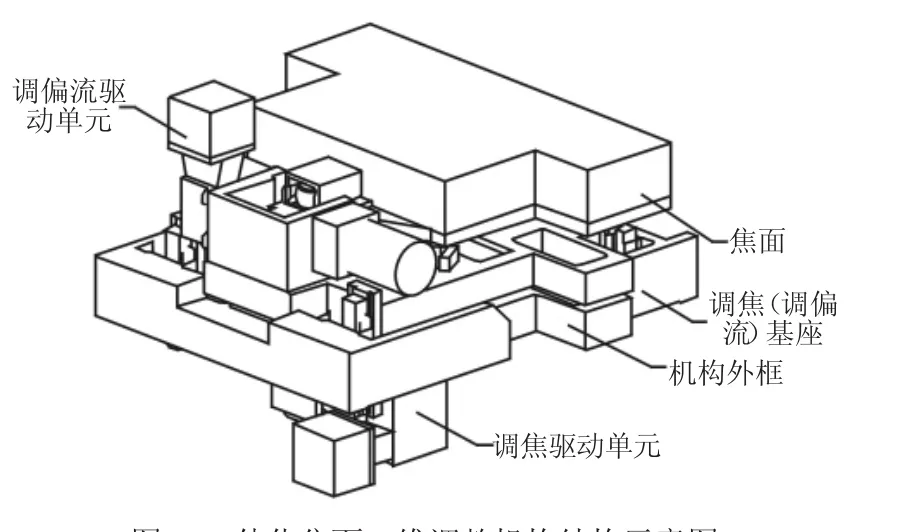
图2 一体化焦面二维调整机构结构示意图Fig.2 Structure Diagram of Integrated Two-Dimensional Adjusting Mechanism for the Focal Plane
4 一体化焦面二维调整机构精度分析
4.1 误差分类
一体化焦面二维调整机构的误差主要分为加工误差、装调误差及空回误差[8]。
4.2 误差分配
任何测量过程皆包含多项误差,而测量结果的总误差则由各个单项误差的综合影响所确定。通过测量掌握了各个单项误差以求测量结果的总误差,是误差的合成;相反,如果给定测量结果允许的总误差,要求确定各个单项误差,就是误差分配。
4.2 .1调焦单元误差传递函数推导
调焦单元主要由调焦电机组件,直线导轨,编码器组件,螺旋传动机构等组成,其原理,如图3所示。电机通过蜗轮蜗杆带动偏心轴转动,进而推动调焦组件沿直线导轨滑动,实现调焦。
焦面组件位移公式:H=R×sina (1)
式中:H—焦面组件位置;R—偏心轴的偏心量。当R=4mm,偏心轴转角a从-90°转到90°时,机构实现(±4)mm的调焦。分析可知,影响调焦精度的主要因素有,螺旋传动机构的空回误差x1、偏心轴加工误差x2及直线导轨的安装误差x3。

式中:Δa—偏心轴转角a的误差;l1—导轨安装长度;b—导轨安装偏角。
综上所述,令 H=f(a,R,b),则误差传递函数为:

式中:σi—测量值i的标准差—测量值i的误差传递系数。
4.2 .2调偏流单元误差传递函数推导
调偏流单元主要由调偏流电机组件,编码器组件,丝杠螺母传动机构,拨叉组件,弧形导轨,焦面组件等组成。丝杠螺母机构把步进电机的转动转化为螺母沿丝杠方向的直线运动,再经过拨叉组件带动焦面组件沿弧形导轨转动,实现调偏流,其原理,如图4所示。
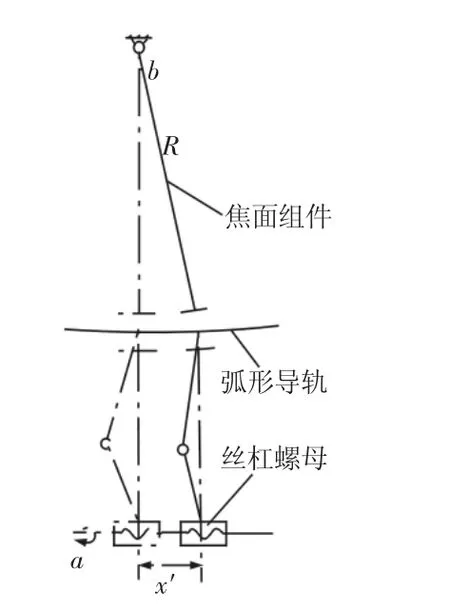
图4 调偏流单元运动原理图Fig.4 Motion Diagram of Drift Adjusting Mechanism

式中:a—丝杠转角;p—丝杠螺距。
分析知,调偏流单元的误差源主要有:传动机构的空回误差x1,丝杠螺母轴线总偏差x2,安装误差的传递过程,如图5所示。
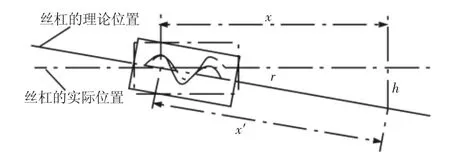
图5 丝杠轴误差示意图Fig.5 Schematic Diagram of Screw Mounting Error

式中:Δa—丝杠转角误差;γ—安装造成的丝杠偏角。
综上所述,误差传递函数为:

4.2 .3基于蒙特卡洛法求解误差传递函数
蒙特卡洛法[9-10],是一种试验数学,它利用随机数进行统计试验,以求得的统计特征值(如均值、概率等)作为待解问题的数值解。
假设待求量x是随机变量ξ的数学期望E(ξ),那么近似确定x的方法是对ξ进行N次重复抽样,产生相互独立的ξ值的序列 ξ1,ξ2,…,ξN,其算术平均值为 ξN,根据大数定理有:

故当N充分大时,可用ξN作为x的估计值。
依据蒙特卡洛法,利用Matlab求解调焦单元误差传递函数(4),取 N=10000,得 σa=0.0014,σR=0.0045mm,σb=0.0020。
①空回误差
x1=5.6×10-3mm<0.01mm,满足设计要求。
②加工误差
x2=0.0045mm,现有加工水平可实现,分配合理。
③安装误差
x3≈2.44×10-3mm<3μm,现有装配水平可实现,分配合理。
④定位精度ΔH(焦面的实际移动距离与理论移动距离之差)ΔH最大值为0.0045mm<0.005mm,满足设计要求。
⑤调焦分辨力计算f1
f1=R×[sin(an)-sin(an-1)]×cosb,已知 R=4mm,b=0.0020,传动比i=30,电机步进角为0.9°,an和an-1分别为电机转动n步和n-1步时偏心轴相对初始位置的转角。计算得f1<2.1μm。
⑥焦面晃动量主要是安装误差造成的,其原理,如图6所示。

图6 安装误差对焦面晃动量的影响原理图Fig.6 Schematic Diagram of Influence of the installation Error on the Momentum of the Focusing Plane
查手册,取 p=10μm,s=3μm,经计算焦面全程晃动量为 3.44”,满足设计要求。
依据蒙特卡洛法,利用Matlab求解调偏流误差传递函数(8),取 N=10000,得 Δa=0.0045,γ=0.0040 。
①空回误差
x1=Δa=0.0045=16.2″,满足设计要求。
②安装误差
x2max=×sinγ≈1μm(丝杠有效长度 l=60mm),满足设计要求。
④调偏流分辨力f2
f2=,已知传动比i=30,电机步进角为0.9°,an和an-1分别为电机转动n步和n-1步时丝杠的转角。计算得 f2<0.18″。
⑤焦面全程晃动量
轴线最大偏差为1μm,考虑齿轮啮合的径向跳动,将焦面垂直跳动误差控制在2μm,经计算焦面晃动量约为6.88",满足设计要求。
5 结论
在分析空间宽幅相机的光学系统特点及其对调焦和调偏流要求的基础上,设计了一套一体化焦面二维调整机构,具有结构紧凑,定位精度高,易于装调,可实现大尺寸焦面拼接等特点。机构总重12kg,调焦行程4mm,调偏流范围5°,基于蒙特卡洛法的误差分配结果表明:执行机构的调焦单元定位精度优于0.0045mm,空回优于0.01mm,分辨力优于2.1μm,焦面全程晃动量为3.44";调偏流单元空回误差为16.2",定位精度为1.48",调偏流分辨力优于0.18",焦面全程晃动量为6.88",各项指标均满足设计要求,适合在宽视场、长焦距的高分辨力空间光学相机中使用。
[1]贾学志,王栋,张雷.轻型空间相机调焦机构的优化设计与精度试验[J].光学精密工程,2011,19(8):1824-1831.(Jia Xue-zhi,Wang Dong,Zhang Lei.Optimizing design and precision experiment of focusing mechanism in lightweight space camera[J].Opt.Precision Eng,2011,19(8):1824-1831.)
[2]鲍赫,杨利伟,姜肖楠.空间光学相机调偏流机构设计[J].光电工程,2012,39(6):22-27.(Bao He,Yang Li-wei,Jiang Xiao-nan.Design of draft adjusting mechanism for space optical camera[J].Optoe.Eng,2012,39(6):22-27.)
[3]柴方茂,樊延超,辛宏伟.焦面二维精密调整机构研究[J].光电工程,2014,41(1):6-11.(Chai Fang-mao,Fan Yan-chao,Xin Hong-wei.The research of twodimensional precision adjustment mechanism for focal plane[J].Optoe.Eng.,2014,41(1):6-11.)
[4]马宏,王金波.误差理论与仪器精度[M].北京:兵器工业出版社,2007.(Ma Hong,Wang Jin-bo.The Error Theory and Precision of Instrument[M].Beijing:Weapons Industry Press,2007.)
[5]杨会生,张银鹤,柴方茂.离轴三反空间相机调焦机构设计[J].光学精密工程,2015,21(4):948-954.(Yang Hui-sheng,Zhang Yin-he,Chai Fang-mao.Design of focusing mechanism for off-axis TMA space camera[J].Opt.Precision Eng.,2013,21(4):948-954.)
[6]张海青,张立平,王智.航天立体测绘相机调焦机构的设计与实验研究[J].机械设计与制造,2009(4):57-59.(Zhang Hai-qing,Zhang Li-ping,Wang Zhi.Design and experimental research on focusing mechanism of aerial stereo mapping camera[J].Machinery Design&Manufacture,2009(4):57-59.)
[7]刘磊,曹国华.大视场长焦面光学遥感器双凸轮式焦面调焦机构[J].光学精密工程,2012,20(7):1939-1944(Liu Lei,Cao Guo-hua.Double cam focusing mechanism of space camera with wide field and long-focal-plane[J].Opt.Precision Eng,2012,20(7):1939-1944.)
[8]王书新,李景林,刘磊.大尺寸焦平面空间相机调焦机构的精度分析[J].光学精密工程,2010,18(10):2239-2243.(Wang Shu-xin,Li Jing-lin,Liu Lei.Accuracy analysis of focusing mechanism in space camera with long-focal-plane[J].Opt.Precision Eng.,2010,18(10):2239-2243.)
[9]李自良,黄惠明,王乃卫.基于蒙特卡罗方法的误差传播与误差分配计算[J].装备指挥技术学院学报,2003,14(3):98-101.(Li Zi-liang,Huang Hui-ming,Wang Nai-wei.Calculation of the error progagation and error distribution based on Monte Carlo method[J].Journal of the Academy of Equipment Command&Technology,2003,14(3):98-101.)
[10]朱陆陆.蒙特卡洛方法及应用[D].武汉:华中师范大学,2014.(Zhu Lu-lu.The Monte Carlo method and application[D].Wuhan:Cntral Chain Normal University,2014.)
猜你喜欢
南方农机(2022年10期)2022-05-14
有色金属加工(2020年4期)2020-08-20
思维与智慧·上半月(2020年4期)2020-04-13
制造技术与机床(2019年11期)2019-12-04
发明与创新·小学生(2019年8期)2019-08-27
制造技术与机床(2019年1期)2019-01-14
制造技术与机床(2017年8期)2017-11-27
通信电源技术(2016年1期)2016-04-16
空间控制技术与应用(2015年1期)2015-06-05
科技创新导报(2014年28期)2014-12-01