自动武器闭锁机构三维装配精度分析技术研究
2018-03-21 05:48常方圆罗少敏
机械设计与制造 2018年3期
常方圆,方 峻,罗少敏
(南京理工大学 机械工程学院,江苏 南京 210094)
1 引言
随着三维数字化与信息技术的发展,国外各大先进制造企业已全面采用数字化设计制造和三维仿真技术的应用。而我国兵器行业目前的制造装配模式还处于数字化的起步阶段,并没有形成完整的数字化集成应用[1]。对于传统的、仅适于手工设计环境的尺寸公差分析已经不能适应现代产品设计、制造、仿真分析等要求。尤其是在CAD/CAM已高度普遍化的今天,它已成为制约三维数字化集成应用技术发展的瓶颈。
公差分析(Tolerance Analysis)是指在公差制定后根据误差的传递路线验证设计公差是否满足装配功能和精度要求。而早期公差分析是以二维图纸为基础依赖于尺寸链和公差带图,通过传统的尺寸链计算分析方法(如极值法、统计法)进行设计,同时常规的计算手段与计算方法工作量大,计算效率低并且校核困难。对此国内外学者进行了大量的研究,文献[2]首次提出通过数学方程式来描述零件的几何特征,并以此来进行零件的尺寸和公差设计。文献[3]在空间运动分析法的基础上,提出了在几何变动中利用Monte Carlo进行模拟的公差分析方法。文献[4]对比分析了利用矢量环与雅克比矩阵进行三维公差分析求解的不同。随着CAT技术在我国迅速推广及应用,国内很多学者对此也进行了研究[5-7]。
重点以M16自动步枪为例进行装配精度分析方法的研究,将特征要素离散化处理,利用矢量坐标矩阵描述物体特征要素在空间中的位置变动,物体的装配偏差累积采用齐次特征矩阵变换来表示。通过在公差域范围内的随机取值,模拟配合表面的误差变动。结合小位移旋量理论,利用旋量参数与公差边界的数学关系作为约束条件,建立符合自动武器结构特点的三维公差分析模型,进行装配精度分析,获得了间隙的变动范围。
2 理论分析
装配精度分析也称为公差累积分析,目的在于分析单个零件的变动范围对装配精度的影响,通过建立装配公差模型,利用蒙特卡洛仿真分析零件的公差累积,从而得到装配间隙变动范围。
小位移旋量(Small Displacement Torsor,SDT)通过六个运动分量组成的矢量来表示刚体产生的微小位移。公差可以看作是几何要素的变动约束,可以转化为相关特征点在公差域内的变动。而物体的点、线、面等基本几何要素在公差域中的变动均可以通过旋量参数来表示。文献[8]在1996年首次将SDT引入到公差领域,提出了基于SDT的公差数学表示方法。零件的几何要素的变动可以用三个平移矢量D=[Δx,Δy,Δz]T和三个旋转矢量R=[Δα,Δβ,Δγ]T来表示,则 SDT表示为τ=[R,D]=(Δα,Δβ,Δγ;Δx,Δy,Δz)T。
几何特征的变动可理解为名义要素上的点在公差带约束条件下,经过一定的空间运动后所形成的偏移。由此,特征点的空间运动可以利用机器人运动学中坐标变换理论,通过D-H矩阵的形式来表示
用上式的表述方法描述配合特征的变动形式,采用随机数模拟实际特征要素的变动,通过矢量元素之间的约束方程,保证变动位于公差域内。使每个装配关系中配合面的变动符合实际装配。
2.1 几何特征公差域参数化建模
理想平面是通过几何要素(点、线、面等)来描述的,在两个理想平面间的任何相对位置均可以用小位移旋量的形式来表示。在此,考虑一个名义平面S0和一个拟合加工表面S1的变动关系。构造一个平面S0,平面上任一点N(a,b,c)处的法线单位矢量为ZN,且为实体外法向矢量方向,如图1所示。在S0附近设置一个间距为T的两平行表面组成公差带,使S0位于这两个平行表面的约束范围内。拟合表面S1,只能在距离基准平面S0-TL~S0+TU间变动,这个空间区域是由S0的正负两个偏移构造而成。
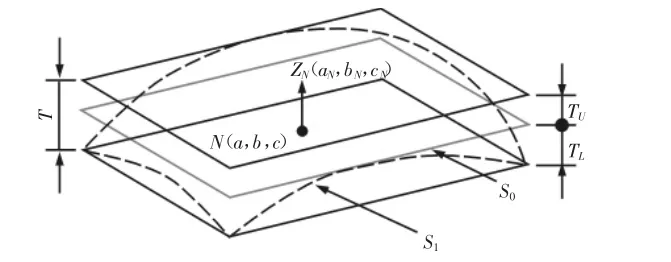
图1 有限个点拟合变动平面Fig.1 Finite Point Method for Fitting Plane
拟合表面S1偏移范围如下:∀N∈S0

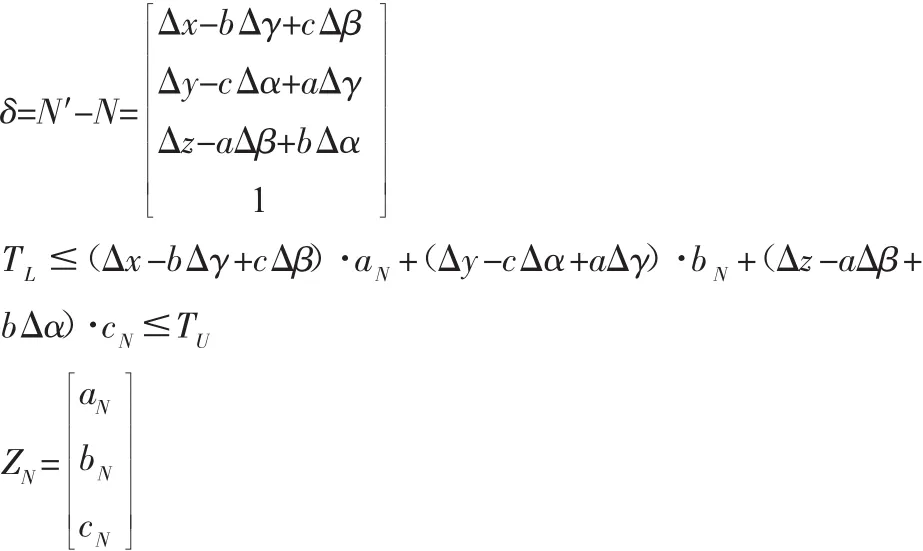
任一平面能离散化为n个点Ni,这n个点在公差范围内变动可用上述方程表示。通过在名义平面S0上沿着法线矢量ZN方向构造n个点,即n个点Ni的映射,可确定S0到Si的每一对应点之间的距离。通过研究极限点在SDT的作用下产生的偏差必须限制在公差域,可以消除某些自由参数。
2.1.1 平面特征
在闭锁机构装配中,配合特征多为圆形表面接触或轴孔配合。故先建立圆形平面特征变动模型:在圆形平面圆周上任取一点 N,与 x 轴正方向夹角为 θ,则点坐标值为(rcosθ,rsinθ,0)。点N在公差域内变动,通过齐次坐标变换如下:
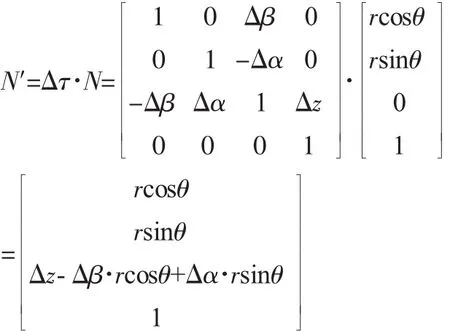
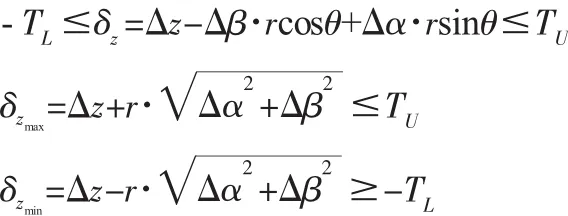
故 Z 坐标轴方向的变化量为 δz=Δz-Δβ·rcosθ+Δα·rsinθ,由于δz的变动范围必须限制在公差域[-TL,+TU]区间内,则有:∀θ∈[0,2π)
2.1.2 圆柱面特征
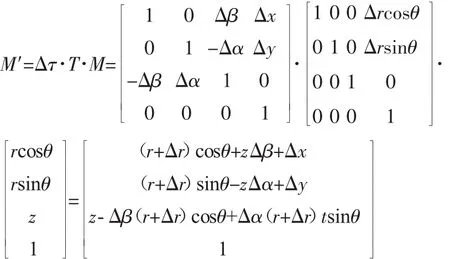
孔-轴配合公差可以看作是圆柱面的方位变动,即建立圆柱面的特征变动模型:设名义圆柱表面上任意一点M的坐标为(rcosθ,rsinθ,z)在旋量矩阵Δτ作用下M点转换到新位置点M′:
圆柱度偏移的极限情况,如图2所示。在XOZ平面内圆柱度公差带绕Y轴转动的倾角β取得极大值。
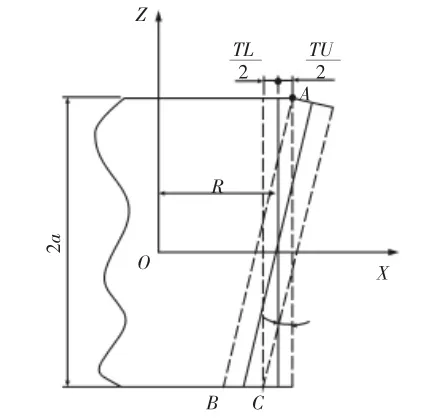
图2 圆柱度公差带极限位置Fig.2 Limit Position of Cylindrical Tolerance Zone
圆柱度公差带处于极限位置时,其边界与XOZ平面的交线Lab的方程为:X=R+Δz+z·Δβmax
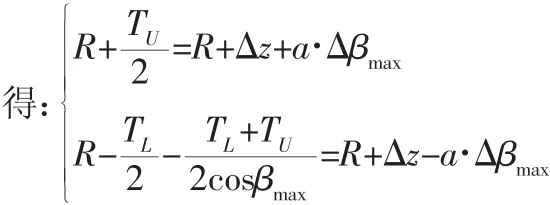
由于是微小位移的偏转,故cosβmax≈1代入上式可得:
2.1.3 圆锥面特征
枪管与弹型样柱之间的接触面为圆锥面,其锥面的配合对装配偏差累积有较大影响,为了满足装配要求需建立斜面圆跳动公差模型。斜面圆跳动的公差带是在与基准同轴的任一半顶角的圆锥面上,距离为t的两圆之间的区域,如图3所示。
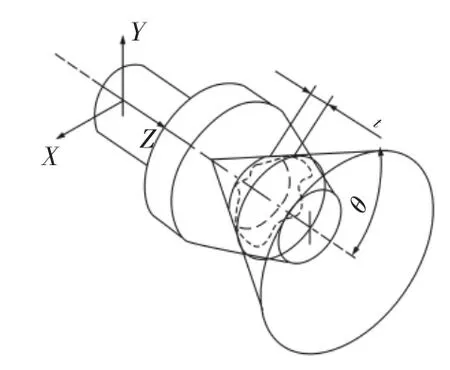
图3 斜面圆跳动公差域Fig.3 Circular Run-Out Tolerance Region
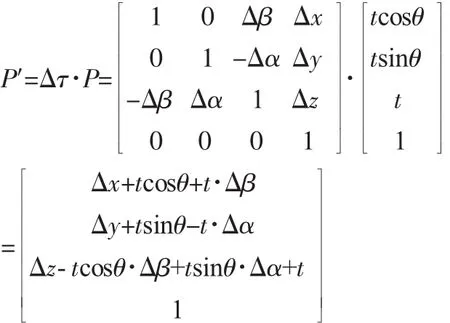
设名义圆锥面上任意一点 P 的坐标为(tcosθ,tsinθ,t)在旋量矩阵Δτ作用下P点转换到新位置点P′:
故 Z 坐标轴方向的变化量为 δz=Δz-tcosθ·Δβ+tsinθ·Δα,由于δz的变动范围必须限制在距离为t的两圆之间的区域内,则有:

3 实例分析
3.1 闭锁机构结构分析
闭锁机构是武器发射时关闭弹膛,承受弹壳底平面对枪机的轴向作用力并防止后逸的机构,对自动武器工作的可靠性和射击准确性都有重要的影响。M16自动步枪采用回转式闭锁机构,闭锁机构由枪机、节套、机框和枪管的有关部件组成,如图4、图5所示。通过枪机上沿圆周均匀布置的闭锁凸笋,作用在节套闭锁槽内的闭锁支撑面上完成闭锁。
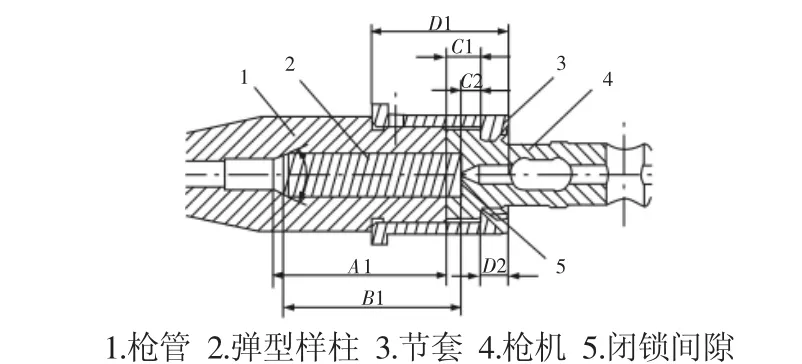
图4 闭锁机构结构图Fig.4 Structure Diagrams of Locking Mechanism
图5 闭锁机构装配爆炸图Fig.5 Assembly Exploded Diagram of Locking Mechanism
表1 闭锁机构名义尺寸及其公差值Tab.1 Nominal Dimension and Tolerance Value of Locking Mechanism

表2 闭锁机构加工装配要求Tab.2 Requirements for Processing and Assembling of Locking Mechanism
而在推弹进膛和闭锁过程中,轴向间隙可能出现在不同部位。此时枪弹与弹膛定位面贴合,枪机与节套闭锁支撑面贴合,在弹壳底平面与枪机弹底窝镜面之间所形成的轴向间隙称之为弹底间隙。为了保证武器在寿命期不发生断壳故障,需要对产生间隙的各组成部分进行分析。根据加工图纸,相关名义尺寸及其公差值,如表1所示。具体加工装配要求,如表2所示。
3.2 分析计算
在公差分析中,几何变动的误差累积是按照运动学关系在装配体中传递的,采用齐次坐标变换的方法来描述零件特征要素之间的几何关系。首先以弹型样柱底面的圆心为原点,以中心线为Z轴,建立固定坐标系。在每个接触表面建立局部坐标系,几何关系传递,如图6所示。该装配模型共4处误差传递。从固定坐标系原点出发,经过各个变动特征,再回到固定坐标点,形成一个封闭的回路。那么,装配体中每个特征在固定N坐标系下的相对位置可以通过几个齐次变换矩阵相乘得到:
将各个特征面的小位移旋量参数引入到旋量矩阵中,则有包含几何变动信息的特征从局部坐标系向固定坐标系转换,得到各参数的偏差累积模型:
式中:Ti—一个局部坐标系向另一个局部坐标系转换的变换矩阵;Δτi—含有旋量参数的偏差传递矩阵;P—固定坐标系特征面上任一点的坐标矩阵;δP—沿三坐标轴的偏差累积。
图6 闭锁机构装配几何特征传递关系图Fig.6 Geometric Features of Locking Mechanism Transfer Relation Graph
蒙特卡洛模拟法是以概率统计为基础,通过对随机变量的统计实验和随机模拟来求解问题近似解。由于实际表面相对于名义表面的变动是无法预知的,具有随机性,因此,公差分析中的旋量参数也是随机量。而零件在实际加工的过程中通常会受众多因素的影响,各种加工方法在随机性因素的影响下所得加工尺寸的分散规律符合正态分布,其尺寸分散范围为6σ。所以在一般情况下,加工方法的标准差σ与公差带宽度T之间具有以下关系:
通过Matlab编程计算,在配合特征公差域内产生随机数,模拟零件特征要素的几何变动,所取得的随机数只有在满足公差边界条件与旋量参数约束方程的情况下才有效,否则重新取值直到满足条件。进行10000次模拟,将每次分析结果存入分析矩阵,并进行统计分析。得出闭锁间隙在基准坐标系中的空间误差沿x,y,z轴坐标的误差统计分布图,如图7所示。
由分析结果可知,闭锁间隙沿三坐标轴的误差变动具有一定的统计规律,近似服从正态分布,如图8所示。且在x轴和y轴方向上变动较小,在有装配功能要求的z轴方向上有较大的误差变动,Δz变动范围在(-0.06~0.16)mm 其中满足装配要求范围的样本占98.2%,与实际装配情况相一致。由于沿x轴和y轴为实际配合表面的径向方向,表现在同轴度的误差变动。沿z轴为实际配合面的轴向方向,是全局误差累积较大的地方,也是装配要求重点保证的。
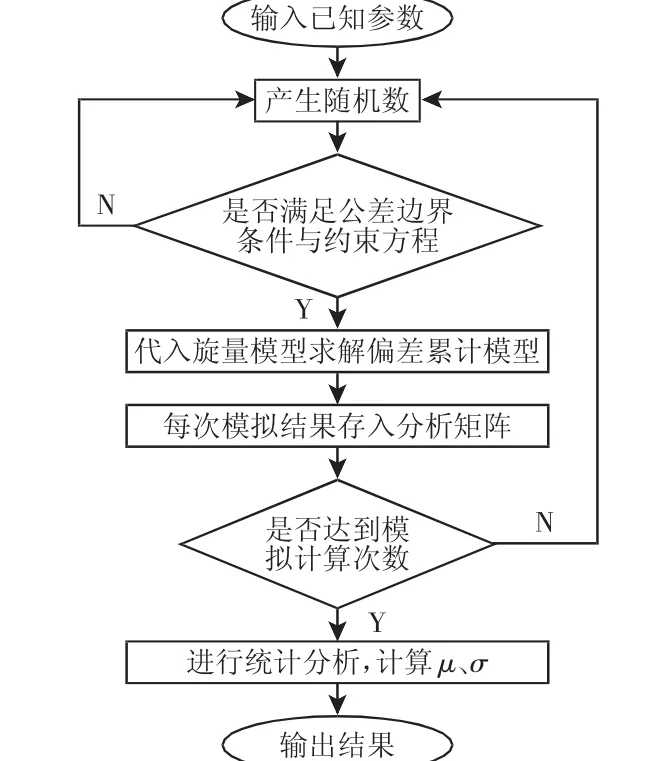
图7 公差分析流程图Fig.7 The Flow Chart of Tolerance Analysis
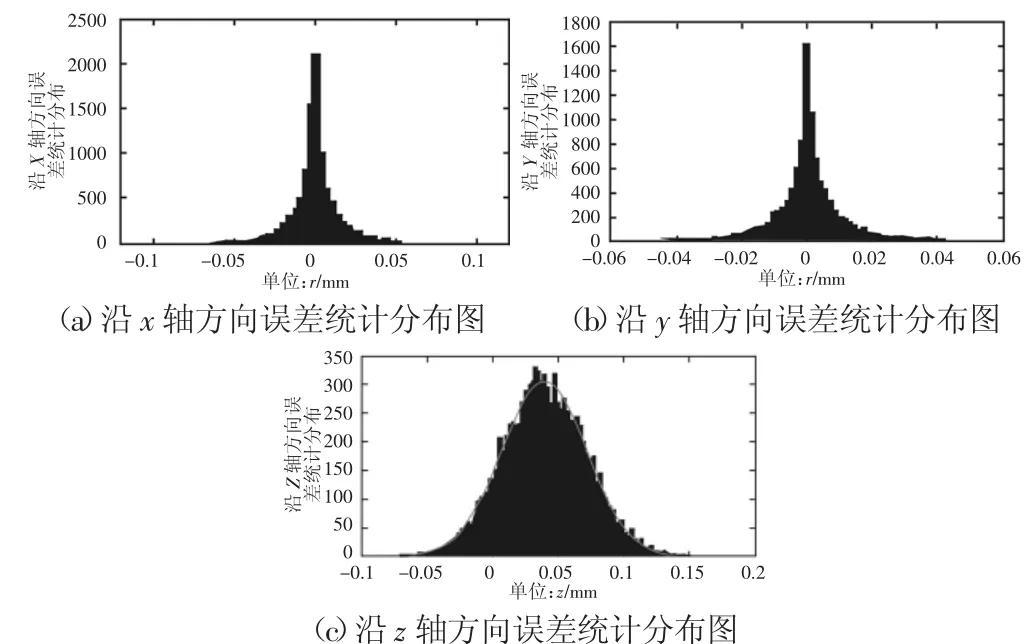
图8 沿三坐标轴误差统计分布图Fig.8 Statistical Distribution of Deviation Along the Three Coordinate
3.3 软件仿真分析
Vis VSA(Visualization Variation Simulation Analysis)软件是基于三维模型,采用Monte Carlo模拟法进行公差分析,预测设计公差是否能够满足其关键的尺寸控制要求。分析步骤如下:(1)在UG中建立闭锁机构的三维模型,转换成VSA软件可识别的JT格式,导入分析软件。定义装配基准、功能特征、装配关系和测量要求。(2)设定尺寸公差与形位公差等参数,将这些具有偏差的零件按照装配顺序组装起来,在模拟多次装配过程中,产品偏差的变化量被记录下来,形成统计分布图,如图9所示。
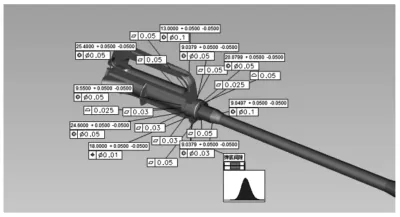
图9 公差分析模型Fig.9 Tolerance Analysis Model
本例采用10000个样本点进行仿真模拟,得到闭锁间隙沿Z轴方向的误差统计分布图,如图10所示。当样本点分布在±3σ范围内,我们认为结果是可信的。由分布图可知间隙变动范围为(-0.04~0.16)mm。
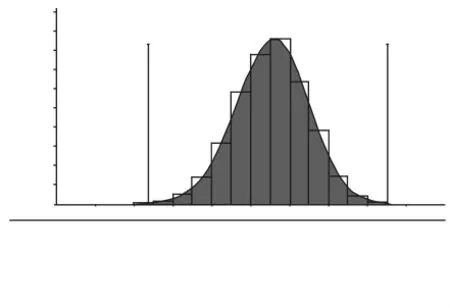
图10 误差统计分布图Fig.10 Deviation Statistical Distribution
若只考虑线性尺寸公差可以得到极值法的计算结果:(-0.04~0.15)mm,将以上几种方法进行分析对比,如表3所示。从结果可以看出,进行公差累积分析时,考虑形位公差和装配间隙后计算出的变化范围比极值法的范围更大。这是由于形位误差表现为配合表面形状上的变化,在实际装配中枪管和枪弹的配合是锥形面贴合,由于形状误差的存在,枪弹在弹膛中的实际接触位置具有不确定性,从而对装配精度造成影响。在线性尺寸链计算时考虑理想表面的接触方式,忽略了几何变动对接触点的影响。而通过旋量矩阵法可以模拟特征面的实际变动,并同时分析沿三坐标轴的装配误差,相对于极值法来说真实反映了装配的不确定性。同时,利用VisVSA公差仿真软件分析可以快速、直观、准确地对装配精度进行预测。

表3 三种公差分析方法对比Tab.3 Comparisonof Three Kinds of Tolerance Analysis Method
4 结论
(1)基于三维模型的公差分析考虑了形位公差和装配间隙等影响因素,提出了特征要素离散化处理的方法,解决了以往在建立约束条件时,因存在取点数量与位置不同而产生误差的问题。(2)通过在公差范围内的随机取值,模拟配合表面的误差变动,在满足公差边界条件与旋量约束条件下进行装配误差累积分析,提出了基于三维模型的闭锁机构装配精度预测方法。所得出的结果比线性尺寸链的分析结果较为严格,真实反映了加工的不确定性,更符合工程实际。
[1]罗少敏,王亚平,邹衍.某型手枪击发机构装配公差分析与信息化集成研究[J].机械设计与制造,2014(28612):132-136.(Luo Shao-min,Wang Ya-ping,Zou Yan.Research on assembly tolerance for firing mechanism of a pistoland solutions for information integration[J].Machinery Design and Manufacture,2014(28612):132-136.)
[2]HillyardR.C.Characterizing non-ideal shapes in termsof dimensionsan tolerances[J].Computer Graphics,1983,12(3):234-238.
[3]Turner,J.U.A.Feasibility space approach for automated tolerancing[J].Journal of Engineering for Industry,1993,115(3):325-341.
[4]MMarziale,WPolini.A review of two models for tolerance analysis of an assembly:vectorloopandmatrix[J].InternationalJournalofAdvancedManufacturing Technology,2009,43(11):1106-1123.
[5]吴昭同,杨将新.计算机辅助公差优化设计[M].杭州:浙江大学出版社,1999:3-9.(Wu Zhao-tong,Yang Jiang-xin.Computer Aided Tolerance Optimization Design[M].Hangzhou:Zhejiang University Press,1999:3-9.)
[6]刘玉生,杨将新,吴昭同.基于数学定义的平面尺寸公差数学模型[J].机械工程学报,2001,37(9):12-17.(Liu Yu-sheng,Yang Jiang-xin,Wu Zhao-tong.Mathematical model of size tolerance for plane based on mathematical definition[J].Chinese Journal of Mechanical Engineering,2001,37(9):12-17.)
[7]胡洁,吴昭同,杨将新.基于旋量参数的三维公差累积的运动学模型[J].中国机械工程,2003(2):43-46.(Hu Jie,Wu Zhao-tong,Yang Jiang-xin.Kinematics model of 3D tolerance accumulation based on screw parameter[J].China Mechanical Engineering,2003(2):43-46.)
[8]Bourdet.A study of optimal-criteria identification based on the small displacement screw model[J].Annals of the CIRP,1998(37):503-506.
猜你喜欢
小资CHIC!ELEGANCE(2022年2期)2022-01-11
重型机械(2020年3期)2020-08-24
航空发动机(2020年3期)2020-07-24
股市动态分析(2020年6期)2020-04-26
股市动态分析(2020年1期)2020-02-10
股市动态分析(2020年1期)2020-02-10
故事作文·低年级(2018年3期)2018-04-08
延河(2017年7期)2017-07-19
阳光(2017年7期)2017-07-18
综合智慧能源(2017年10期)2017-01-18