
基于地面三维激光扫描及BIM技术的坡面土壤侵蚀监测
2018-03-29 08:55邓神宝沈清华陈三雄傅志浩
水利技术监督 2018年1期
邓神宝,沈清华,陈三雄,傅志浩
(中水珠江规划勘测设计有限公司,广东 广州 510610)
土壤是陆地生态系统的基础[1]。当今社会高速发展,建设活动频繁,植被破坏、坡耕地垦殖严重,土壤侵蚀形势严峻。研究准确、快速测定土壤侵蚀量,制定土壤侵蚀的防治措施,是可持续发展必须解决的课题,传统的土壤侵蚀监测方法包括径流小区法、侵蚀沟量测法、沉沙池法等,这些方法存在精度低、工作量大等问题[2]。部分研究结合GIS和RUSLE模型(Revised Universal Soil Loss Equation,修正的通用土壤流失方程),利用GIS生成单项因子的栅格数据层,再按照RUSLE模型综合各项因子执行栅格运算,获得土壤侵蚀量数据层,据此分析土壤侵蚀的强度分布、影响因子等[3- 7]。这类方法适用于大范围监测,小规模研究区利用遥感数据精度不高,且难以准确剔除植被。匡星等人推导出路堤坡面水土流失计算方法,可估算路堤水土流失临界坡长和水土流失模数,算得水土流失量与实测结果吻合[8]。类似的公式法参数较多,一些参数依据实验或经验取值,易受人为主观因素影响,且参数值适用性不强。使用铁钉法、GPS测量法计算土壤侵蚀量,通过一定间隔的有限数据,插值获得整个研究区的模型,由于数据稀疏,精度不高[9- 10]。
坡面土壤侵蚀监测,不仅需要快速、高精度的数据采集手段,还需要高效、准确的数据处理和计算平台。地面三维激光扫描,也称“实景复制”技术[11],将传统的接触式单点测量,转变为远距离三维立体扫描,具备高效、高精度和超长测距等优势。三维激光扫描仪结合ArcGIS、Leica cyclone等软件,已被应用于水土流失量计算[12- 13]。然而,ArcGIS并无专业的点云处理功能,运算性能有限;Leica cyclone点云处理功能强大,但在点云叠加显示、范围裁切等方面有所不足。Bentley公司的Power InRoads是功能强大的BIM软件,具备点云可视化、裁切、三维建模等功能,运算性能强大,可由点云直接生成DTM(Digital Terrain Model,数字地形模型)计算侵蚀量。本文使用地面三维激光扫描仪采集点云,引入Bentley Power InRoads计算侵蚀量,以某高速的弃用便道边坡作为研究区,探讨坡面土壤侵蚀监测方案。
1 原理
1.1 地面三维激光扫描
三维激光扫描仪的工作原理为:激光发射器产生激光脉冲扫描目标P,以扫描仪中心为原点测算目标距离r,并同步记录激光束的横向旋转角度φ和纵向旋转角度θ,得到P点极坐标(r,φ,θ)。根据图1所示的极坐标与笛卡尔直角坐标的关系,按图1算得P点直角坐标[14]。

图1 维激光扫描仪的工作原理[14]
(1)
本研究使用奥地利生产的RIEGL VZ- 1000型三维激光扫描仪及其配套软件RISCAN PRO。该款扫描仪激光发射频率可达30万点/s,最小角分辨率为0.0005°,100m处单次扫描精度为5mm。
1.2 DTM
DTM是由地面散点构建的一系列连续的三维三角形,对于不规则表面建模十分有效。基于DTM的侵蚀量计算原理如图2所示,将起始面的三角形依次投影至侵蚀面上,形成平截头棱锥体,依据所有平截头棱锥体体积算得侵蚀量。其中,侵蚀面位于起始面以下的部分为冲刷量,侵蚀面在上的部分为堆积量。结果精度仅受DTM精度影响,而DTM精度取决于点云精度、DTM构建精度两个方面,本研究对此均有针对性措施。
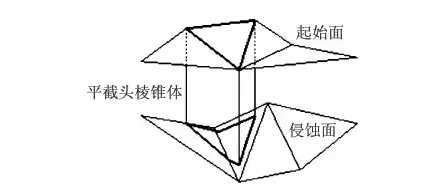
图2 基于DTM的土壤侵蚀量计算原理
2 技术路线
土壤侵蚀监测主要包括数据采集、点云处理和侵蚀量计算三个部分。数据采集主要使用RIEGL扫描仪,点云处理使用RiSCAN PRO,侵蚀量计算基于Bentley Power InRoads实现,如图3所示。
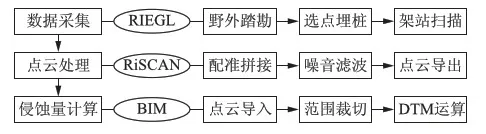
图3 土壤侵蚀监测技术路线
2.1 数据采集
首先野外实地踏勘,查看现场地形,确定监测范围,选定三维激光扫描仪的测站点。部分特殊、困难地区,适当加密设置测站点,以便从多个角度扫描,消除盲区。选定测站点后,埋设固定标石长期保存使用。标石稳定后,精确测量测站坐标。三维激光扫描,首先设定适当的扫描距离和角分辨率,扫描距离根据测站点与扫描对象的距离设置,可选范围介于450~1200m之间;角分辨率越小,点云模型越精细,采集时间越长,建议选用0.04°或0.02°。作业时,三维激光扫描仪架设在前期选埋的固定标石上,严格对中整平。采用稳固不变的标石,是保证数据采集精度的关键。
2.2 点云处理
使用RiSCAN PRO,结合测站坐标、方位角等数据,将点云配准至工程坐标系。由于坐标、方位角等值可能存在误差,配准后的点云模型会有细微的位置差异,多站调整计算可消除这一差异,实现点云模型的无缝拼接。点云中的噪声点包括植被、电杆等非地形点,以及少量的空中离散点,对计算结果影响较大,必须充分滤除。RiSCAN PRO的地形滤波器(terrain filter),通过运算分析自动筛选植被和电杆点云;对于少量的空中离散点,可人机交互选取剔除。之后将点云导出为文本格式(.txt)。
2.3 侵蚀量计算
将点云导入Bentley Power InRoads,提取固定特征点坐标,统计各期点云的相对精度,在精度合格的前提下,计算侵蚀量。为保证DTM构建精度,对滤波后的点云不做抽稀及插值处理。指定计算范围,根据该范围裁切点云,确保各期数据计算范围一致。点云裁切后直接生成DTM,两期DTM执行计算,即可得到土壤侵蚀量。
3 结果与分析
3.1 研究区概况
研究区位于广州市从化区吕田镇境内,为某高速弃用的便道边坡。监测前,对便道进行了封闭处理,监测期间边坡坡面不受人为干扰。坡面长约70m,面积为824.149m2。在坡面周围埋设4个测站点标石,标石凝固稳定后,于2015年9月16日完成第一期扫描,之后于2015年11月3日、2016年4月28日、8月30日分别完成第二期、第三期和第四期扫描。
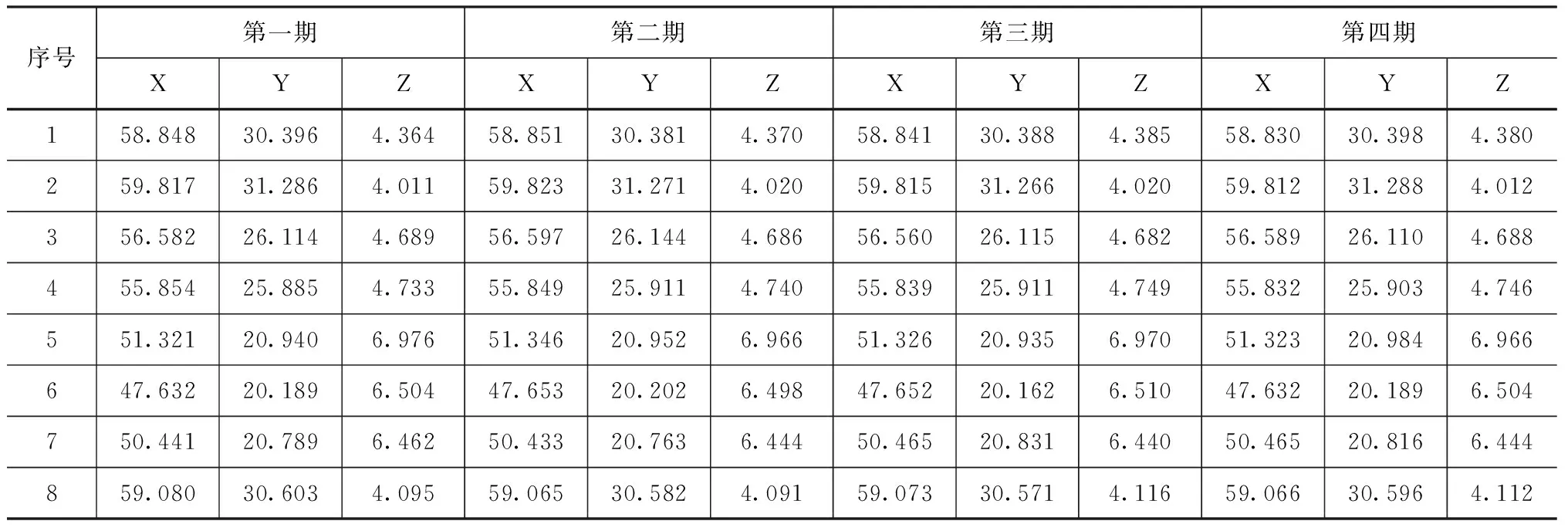
表1 各期点云同名特征点坐标 单位:m
3.2 点位误差统计
选取8个固定特征点作为检测点,以第一期数据为基准,分别统计第二、第三和第四期相对于第一期数据的精度,坐标数据见表1。选择点位中误差、特征点间距中误差两项精度指标,根据相关规范,检测点数量小于20,以误差的算术平均值代替中误差[15]。按照1- 5、2- 6、3- 7、4- 8的组合构成四条特征线,依据特征点坐标反算特征线长度,据此统计特征点间距中误差。
精度统计结果见表2,相对于第一期数据,第二期数据的点位中误差为25mm,间距中误差为40mm;第三期点位中误差为26mm,间距中误差为34mm;第四期点位中误差为19mm,间距中误差为26mm。参照相关技术要求[16],点位中误差均不大于30mm,达到二等精度要求;间距中误差均不大于50mm,达到三等精度要求,可见点云精度较高。
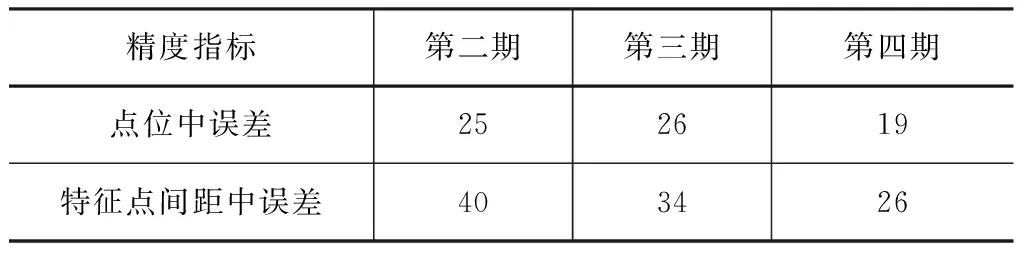
表2 点云相对精度统计 单位:mm
3.3 计算结果分析
侵蚀量计算将四期数据两两组合分为三组,三组数据的起始面分别为第一、第二和第三期数据,全部以第四期数据作为侵蚀面。这样最大化三组数据的监测时间,侵蚀量较大,利于分析比较。已有研究验证了使用Leica cyclone计算土壤侵蚀量可以满足野外监测要求[12]。本文将BIM软件与Leica cyclone的计算结果进行对比,见表3,验证本文方法的可行性。

表3 土壤侵蚀量计算结果及比较 单位:m3
由表3可得出以下结论:①BIM软件与Cyclone的计算结果误差最大为14.81%,最小为2.97%,平均误差为8.04%,两者结果较为一致;②BIM软件的计算结果显示,起始面与第四期数据间隔时间越短,侵蚀量越小,计算结果符合逻辑推理;③坡面总面积为824.149m2,第一期与第四期之间的侵蚀量为41.495m3,平均流失厚度达到5.035cm。坡面表层为裸土,且坡度介于45°~60°之间,因此土壤侵蚀剧烈;④土壤侵蚀主要集中在第三期和第四期之间,期间流失量占比达到77.0%,这是当地降雨最为集中的时期,约含盖了年降雨量的80%,说明坡面土壤侵蚀主要受降雨影响。
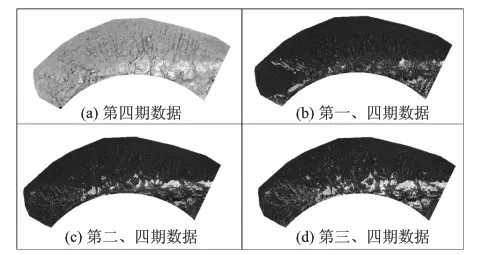
图4 DTM叠加显示效果 注:图4中,第四期数据为灰色表示,其余各期均为黑色表示。
DTM叠加显示效果如图4所示。图4中(a)图为第四期数据构造的DTM,模型中雨水冲刷效应明显,侵蚀沟轮廓清晰;(b)、(c)、(d)三图为前三期数据与第四期数据依次两两叠加而得。严重冲刷区域,土壤表面成分不断流失,侵蚀面被覆盖于起始面以下,且两期数据相隔时间越久,冲刷量越大,覆盖越多。边坡右下方稍平缓,冲刷物在此堆积,形成灰色出露部分。土壤主要沿侵蚀沟流失,使得侵蚀沟拓宽变深。
4 结语
本文结合三维激光扫描仪及BIM软件,研究了坡面土壤侵蚀监测,介绍了具体的工作流程,研究区监测结果说明。
(1)BIM软件与Leica cyclone的侵蚀量计算结果接近,平均误差为8.04%;
(2)监测坡面为裸土,坡度介于45°~60°之间,平均流失厚度达5.035cm,土壤侵蚀剧烈;
(3)侵蚀作用主要发生在雨水较多的4~8月份之间。
需要注意的是,本文侧重方法的比较验证,忽略了土体下沉对侵蚀量的影响,这是本文的不足之处,也是实际应用必须考虑的因素。BIM已融入建设工程各个阶段,对其需求也日益增加,将BIM引入土壤侵蚀监测,满足建设工程数据一致性、平台一致性的要求,符合技术发展的潮流。
[1] 黄昌勇, 徐建明. 土壤学[M]. 北京: 中国农业出版社, 2010.
[2] 喻权刚. 新技术在开发建设项目水土保持监测中的应用[J]. 水土保持通報, 2007, 27(04): 5- 9.
[3] 胡最, 朱飞, 邓运员, 等. 基于 DEM 的衡阳盆地水土流失估算[J]. 热带地理, 2013, 33(06): 681- 688.
[4] Farhan Y, Zregat D, Farhan I. Spatial estimation of soil erosion risk using RUSLE approach, RS, and GIS techniques: a case study of Kufranja Watershed, Northern Jordan[J]. Journal of Water Resource and Protection, 2013, 5(12): 1247.
[5] 徐国策, 李占斌, 李鹏, 等. 丹江鹦鹉沟小流域土壤侵蚀和养分损失定量分析[J]. 农业工程学报, 2013, 29(10): 160- 167.
[6] 杨冉冉, 徐涵秋, 林娜, 等. 基于 RUSLE 的福建省长汀县河田盆地区土壤侵蚀定量研究[J]. 生态学报, 2013, 33(10): 2974- 2982.
[7] 徐保利, 鲁恒, 邵东国. 基于遥感和 GIS 技术的区域土壤侵蚀量研究[J]. 灌溉排水学报, 2014, 33(04): 291- 294.
[8] 匡星, 王连俊, 白明洲. 路堤边坡土体水土流失计算方法探讨[J]. 土木工程学报, 2009 (04): 128- 132.
[9] 胡宏祥, 洪天求, 刘路. 水土流失量和养分流失量的预测[J]. 环境科学研究, 2009 (03): 356- 361.
[10] 张鹏, 郑粉莉, 王彬, 等. 高精度 GPS, 三维激光扫描和测针板三种测量技术监测沟蚀过程的对比研究[J]. 水土保持通报, 2008, 28(05): 11- 15.
[11] 官云兰, 程效军, 詹新武, 等. 地面三维激光扫描仪系统误差标定[J]. 测绘学报, 2014, 43(07): 731- 738.
[12] 何元庆, 魏建兵, 郭彦娟, 等. 3D 激光扫描测量开发建设项目堆弃土边坡侵蚀强度的试验研究[J]. 中国水土保持, 2012 (11): 31- 33.
[13] 王珊, 史明昌, 王昆, 等. 激光扫描技术应用于细沟侵蚀的研究—以东北典型黑土区为例[J]. 四川农业大学学报, 2013, 31(02): 188- 192.
[14] PFEIFER N, BRIESE C. Laser Scanning- principlesand Applications Summary[DB/OL]. 2008- 1- 18[2012- 05- 21] http: //publik. tuwien. ac. at/files/pub- geo_1951. pdf.
[15] GB/T 24356- 2009. 测绘成果质量检查与验收[S].
[16] CH/Z 3017- 2015. 地面三维激光扫描作业技术规程[S].
猜你喜欢
科海故事博览·下旬刊(2022年4期)2022-05-07
探索科学(学术版)(2020年3期)2020-03-11
模具制造(2019年3期)2019-06-06
中国水土保持科学(2019年6期)2019-04-26
西南石油大学学报(自然科学版)(2018年6期)2018-12-26
农业工程学报(2018年5期)2018-03-10
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
