阵列三维MIMO—SAR系统设计与仿真
2018-03-30 02:26张佳佳孙龙江凯
电子技术与软件工程 2017年16期
张佳佳 孙龙 江凯

摘要
阵列三维合成孔径雷达(Synthetic Aperture Radar,SAR)成像系统可以克服阴影效应,对城市街区等地形变化剧烈的区域进行三维成像。本文提出了一种阵列三维MIM0-SAR系统设计方案,并结合设计实例进行了系统仿真分析。
【关键词】MIM0波形 三维合成孔径雷达 稀疏阵列
在传统侧视SAR图像中,由于SAR的固有成像机制和地面场景的几何关系,起伏较大的山體、城区等区域将不可避免地形成叠掩现象,导致得到的地图中存在地形失真及叠掩区信息丢失,阵列天线三维SAR成像系统能够获得真正的三维图像,极大缓解甚至消除叠掩现象,适合于复杂地形的测绘,在山川、河谷及城市地区的测绘应用中具有不可替代的作用。
本文提出了一种基于MIMO体制的阵列三维SAR系统的设计方案,系统在交轨方向上布置多个稀疏排列的子孔径,实现阵列稀疏化设计。该方案利用MIMO体制获得最大的等效孔径,实现高的切航迹向分辨率;同时采用多普勒分集波形的方案,避免正交信号互相干扰,具有工程可实现性。本文首先从交轨阵列形式设计、波形选择等方而进行了系统设计的描述;最后进行了系统的仿真分析。
1 阵列三维SAR原理
阵列天线三维成像雷达系统的几何结构示意图如图1所示,理论上阵列三维SAR系统的高程分辨率由雷达发射信号带宽决定,切向分辨率由虚拟阵列天线的长度、载波波长和雷达斜距共同决定,方位向分辨率由合成孔径长度决定。
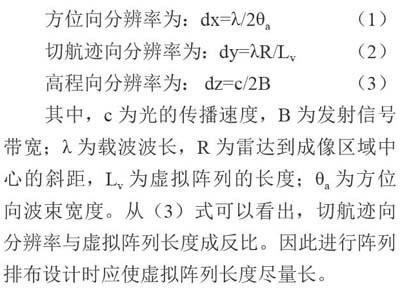
方位向分辨率为:
切航迹向分辨率为:
高程向分辨率为:
其中,c为光的传播速度,B为发射信号带宽;λ为载波波长,R为雷达到成像区域中心的斜距,Lv为虚拟阵列的长度;θa为方位向波束宽度。从(3)式可以看出,切航迹向分辨率与虚拟阵列长度成反比。因此进行阵列排布设计时应使虚拟阵列长度尽量长。
2 MIM0-SAR系统设计
2.1 交轨阵列形式设计
交轨阵列的设计选择包括发射子阵个数、子阵排布形式等。交轨阵列的设计需要综合考虑以下因素:
(1)如何在系统安装条件下获取最大的等效口径,即足够高的切航迹向分辨率;
(2)如何在获取最大的等效孔径前提下,获得最多的等效相位中心,从而获得尽量密集的等效阵列。
2.1.1 收发子阵形式设计
相位中心近似(PCA)的基本原理为:一定条件下,一对发射和接收分置的子阵,可以由位于它们中心位置的一个收发共用的相位中心来替代。
等效的虚拟阵列长度为:
Lv=(LT+L)/2 (4)
从上式可以看出:
(1)当Lr>0时,即发射子阵(密阵)位于整个MIMO阵列的中心区域,则等效的虚拟线阵长度为Leq=L/2;
(2)当Lr>L时,即发射子阵(密阵)位于整个MIMO阵列的两侧,则等效虚拟线阵长度Lv=L。
综上所述,随着相隔最远的两个发射子阵的距离增加,等效的虚拟线阵长度也随着增加。因此,从MIMO阵列原理上考虑,发射子阵(密阵)布设于整个阵列的两侧时获得的等效孔径最大。
2.1.2 发射子阵个数选择
为了在获得最大等效孔径的同时获得最多等效阵列个数,需要选择最优的发射子阵个数按照PCA原理将获得的等效相位中心个数为
可见,
时,系统获得的等效相位中心个数最多。
2.2 MIMO波形选择
正交波形设计是实现阵列三维MIMO-SAR方式的关键,然而现有的绝大多数码分正交波形都具有较高的互相关积分旁瓣电平,无法满足工程需要。
为了避免正交波形的互相干扰,文献[5]提出采用各发射天线交替发射普通SAR信号的方式,即个发射天线在各个脉冲重复周期交替地发射普通SAR信号,每一脉冲重复周期所有接收天线同时接收地面回波,从而等效地实现多发多收。如此,各阵元发射信号的主瓣回波将交替地出现在不同的脉冲重复周期,避免了发生混叠。但是交替发射MIMO-SAR系统在每个脉冲重复间隔内只有一个天线发射信号,比起其他正交波形MIMO-系统功率孔径积较低。
综合考虑现有的正交波形,采用多普勒分集正交波形。多普勒分集正交波形给每一个发射子阵分配一个不同的慢时间线性编码,将其所对应的回波调制到无模糊的多普勒空间的不同部分中。于是,可以用相对简单的多普勒滤波器将对应于不同发射子阵的波形一一分离,如图2所示。这种方式跟发射交替发射信号方式需要同样大的PRF以分离N个发射波形。但是这种方式的等效PRF为时分方式的N倍,因此其他条件相同的情况下,功率孔径积为交替发射波形MIMO方式的N倍。
3 仿真分析
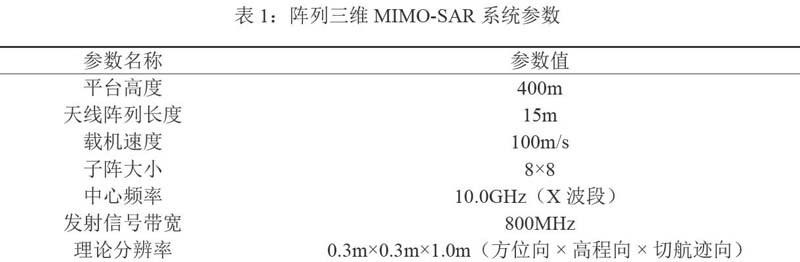
以下我们针对阵列三维SAR的原理验证系统进行仿真分析。表1给出了阵列三维SAR系统的相关参数。
系统采用8×8的子阵,考虑到二维扫描的能力,单元间距设计为0.022m(方位向)及0.0168m(切航迹向),子阵的大小为0.176m×0.1344m(方位向x切航迹向)。为了满足沿航迹方向不模糊,系统等效PRF要求大于1500Hz。收/发双工子阵个数选择为4个(机翼两端各分布2个收/发子阵)。
MIMO阵列设置和等效虚拟阵列示意图见图3,系统采用两端同时发射、全阵列接收的方案,共23个接收子阵,4个收/发双工子阵,可等效形成101个虚拟相位中心,虚拟阵列长度为15m,理论上在400m的作用距离下可以实现优于1.0m的切航迹向分辨率。沿航迹向的天线尺寸176mm,通过合成孔径可以实现优于0.3m的方位向分辨率,通过发射800MHz宽带线性调频信号可以实现优于0.3m的高程向分辨率。
4 结束语
阵列三维SAR系统可以克服阴影效应,对城区建筑物山区等地形变化剧烈区域进行成像,将为全天候、全天时的军事侦察、地形测绘提供更强有力的工具。本文提出了一种基于子阵级MIMODBF体制的阵列三维SAR系统的设计方法,该方法可以获得最大的等效孔径实现高的切航迹向分辨率,同时采用多普勒分集波形方案,避免因为发射正交信号而带来的系统复杂度,具有工程可实现性。
参考文献
[1]Canta1loube,H.M.J.,Colin-Koeniguer.High resolution SAR imaging along circular trajectories[C].IGARSS2007,June 2007,p 850-853.
[2]何峰.曲线合成孔径雷达三维成像研究进展与展望[J].雷达学报,2015,10(01):165—169.
[3]C.H.Gierull.On a concept for an airborne downward-looking imaging Radar[J].AEU,2009,vol.53(06):295-304.
[4]邬伯才,施晋生,孙龙,江凯.宽带DBFSAR/MTI雷达典型工作模式设计[J].雷达科学与技术,2014,12(01):20-28.
[5]吴子斌,朱宇涛,粟毅,李禹,宋晓骥.用于机载线阵三维SAR成像的MIM0阵列构型设计[J].电子与信息学报,2013,35(11):2672—2677.
[6]张佳佳.多发多收合成孔径雷达关键技术研究[D].西安电子科技大学工学博士学位论文,2014.