
基于Wifi无线视频监控的移动机器人的研发
2018-04-04 05:01田亚娟广东松山职业技术学院科研处广东韶关512126
电气自动化 2018年1期
田亚娟(广东松山职业技术学院科研处,广东 韶关 512126)
0 引 言
设计研发了一种基于Wifi无线视频监控的移动机器人,机器人可以直接用笔记本电脑上的无线网卡连接的Wifi网络对机器人进行监控。其具有实时性高、成本较低、易于扩展、结构紧凑轻巧、移动灵活敏捷、通过能力强、适应性能力强、有合适的通信距离和支持远程监控的特点。具有可以通过城市内一般障碍、在城市路面以及部分野外路面以较高的速度行走、转向灵活、能在较为恶劣的环境中进行工作、适于城市环境内无线通信并能将采集到的数据回传其监控系统的功能。
1 系统的硬件组成
1.1 系统的硬件组成
机器人系统[1]的结构框图如图1所示。机器人系统由五大部分组成,分别为机械控制部分,环境信息采集部分,通信部分,功能辅助部分及上位机部分。
机械控制主要负责舵机的协调组合动作,以实现摄像头的向上、向下、左转、右转四项基本动作、控制土壤湿度计的插入、拔出,以及控制移动机器人的前进、后退、左转、右转使其能在陌生的环境中灵活动作。

图1 系统的结构框图
环境信息采集通过传感器部分能够检测包括温湿度信息、土壤的湿度信息、紫外线信息、烟雾信息、气压信息、经纬度信息、海拔信息、振动信息、金属探测信息、人体热释电红外信息等在内的众多环境信息参数,并可根据具体任务要求进行扩展。
通信部分通过Wifi无线数据传输模块[2]将采集的信息参数实时准确的进行传输。
功能辅助在本设计中主要包括GPS定位、摄像头图像数据传输可使其在复杂环境下迅速准确确定当前经纬坐标,判别运动方向,查看当前所处周围环境,以便准确无误确定地点完成探测任务。
上位机通过C#设计的显示界面,实时显示当前环境信息的各项参数及指标,并将某些参数以图线的形式形象直观地显示。
1.2 主控芯片和数据交换芯片的选择
由于机器人系统要求能够在复杂的环境下完成相应任务,作为主控芯片,要求具备高速、低功耗、安全性能好等优点。因此,主控芯片选择了STC89C52单片机[3]。STC89C52是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有 8 K字节系统可编程Flash存储器。STC89C52使用经典的MCS-51内核,但做了很多的改进,使得芯片具有传统51单片机不具备的功能。在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使得STC89C52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。
为了满足数据交换和数据处理的需要,选择AVR的ATmega16单片机作为数据交换和处理芯片。ATmega16单片机内部资源丰富,带有集成的8路10位ADC转换器、四通道PWM、两个可编程的串行USART,可工作于主机/从机模式的SPI串行接口和丰富的中断源等。具有非易失性程序和数据存储器,无需配置Flash存储器、SRAM和E2PROM,简化了系统结构,使外围电路最小化。
2 系统的软件设计
系统的软件设计采用模块化设计方法,通过各功能模块的硬件设计和软件设计联调,完成产品的总体软件设计。本产品软件设计包括上位机程序和下位机程序。
2.1 上位机PC控制端程序
上位机PC控制端程序采用Visual Studio 2012开发环境,使用C#语言编程。PC控制端通过TCP向Wifi模块的相应端口发送控制数据[4],Wifi模块会自动转发到串口并发送到控制芯片上,主控芯片将采集到的信息通过Wifi模块传输到PC控制端并显示。摄像信息的处理过程是上位机程序首先根据摄像头视频流的地址从Wifi模块读取出第一帧图像并进行解码,再将图像帧推送到显示控制上,然后使用线程循环的方式进行读取剩余帧,即实现摄像头视频流的读取。
2.2 下位机控制程序
下位机控制程序的主程序设计流程图如图2所示。

图2 主程序流程图
系统的控制方式可分为自主控制模式和无线控制模式。自主控制模式是指机器人在行进过程中自动检测传感器信号,获取行进过程中的实时路况,判断周围障碍物距离等进行自主定位,利用电机驱动模块输入信号的改变来调节电机的方向和转速,从而准确实现自动行驶和道路避障。无线控制模式是通过移动终端软件设计界面,点击界面控制按钮可以人为地来控制小车的行进、转向。
2.3 Wifi网络下的视频传输
通过视频图像信息处理系统[5]实现了机器人系统实时视频采集的核心功能,其可以将实时采集的视频信息经过压缩编码后传递给后端控制台,最大限度地帮助控制中心做出正确的策略判断。本产品的视频传输采用Microsoft开发的VFW软件开发工具。通过调用VFW提供的应用程序编程接口(API),可以方便地实现预览视频、捕获当前视频流到文件或缓存、捕获单帧图像显示等操作。VFW中用捕获类AVICap中提供的多个函数实现了视频的捕获操作,如capCaptureWindow()函数创建捕获窗口、capDrivercormect()实现音频视频采集设备驱动程序与捕获窗口之间的相互关联等。
3 研发的机器人样品及样品测试
3.1 研发的机器人样品
机器人样品组成包括车载平台、主控制板、各种传感器、舵机和摄像头、电源等部分。其样品及传感器分布图见图3和图4。

图3 样品及传感器分布图1
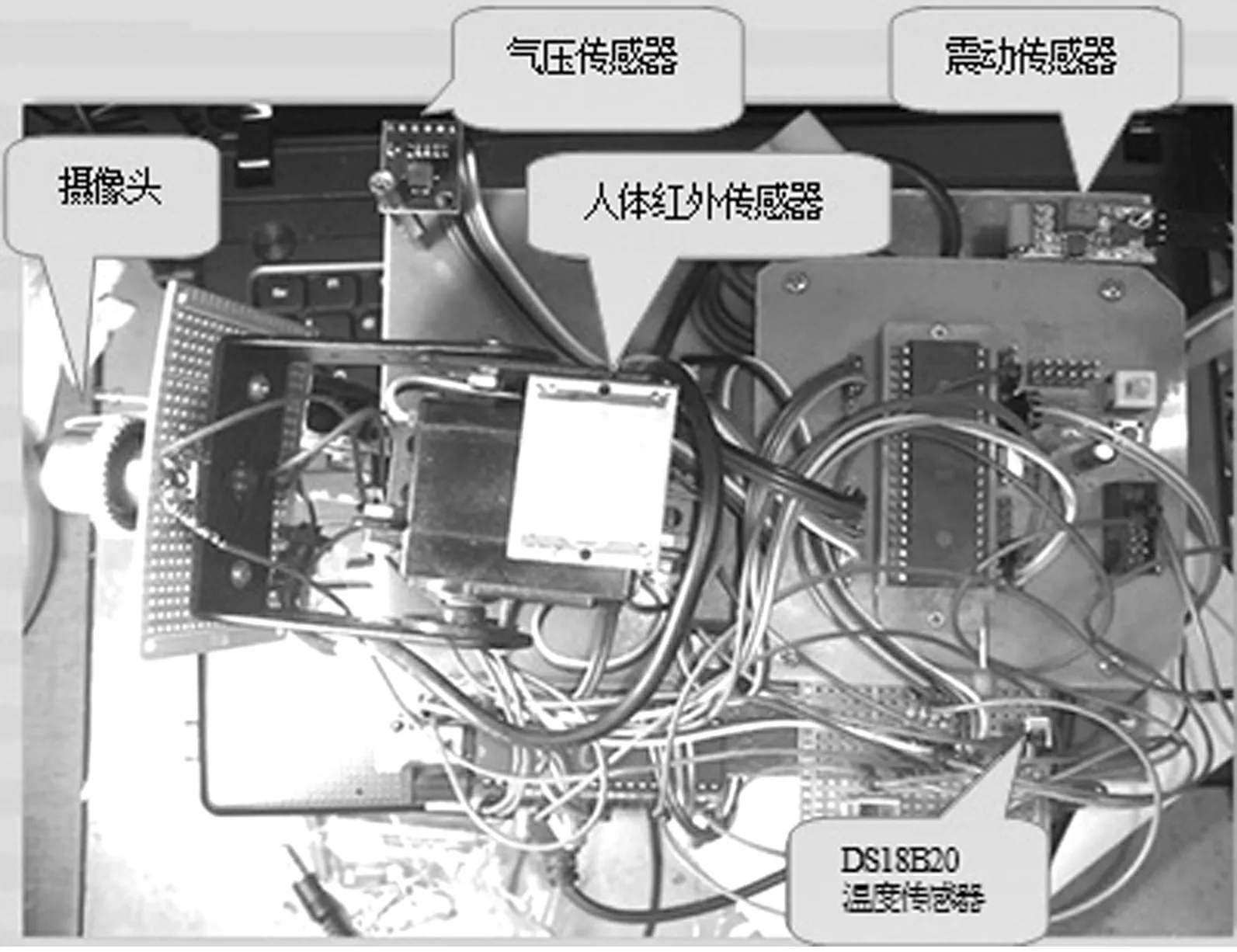
图4 样品及传感器分布图2
3.2 样品测试
样品测试结果见图5,图中显示的是产品测试时的上位机跟踪环节。其环境检测结果见表1。产品测试结果达到项目设计目标要求,实现预期控制目标。

图5 样品测试

表1 环境检测结果
4 结束语
研发设计的样品以STC89C52为主控芯片、ATmega16为数据转换和处理芯片,设计并研发了基于Wifi无线视频监控的移动机器人。通过样品测试,各项测试结果符合产品设计要求,实现了移动机器人远程监控、实时控制、使用方便快捷、成本较低和易于扩展等功能,产品可用于复杂环境的侦察和探测,各项环境检测结果达到指标要求。
参考文献:
[1] 刘晋峰.玩机器人学单片机[M].北京:电子工业出版社,2013.
[2] 彭柳,方彥军.基于无线传感网络的移动机器人通信研究[J].通信技术,2008,41(2):108-110.
[3] 田亚娟.单片机应用技术(C语言版)[M].大连:大连理工大学出版社,2014.
[4] 任智.无线自组织网络路由协议及应用[M].北京:电子工业出版社,2015.
[5] 李健.视频质量的主客观评估方法研究[D].西安:西安电子科技大学,2009.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
无线互联科技(2021年4期)2021-04-21
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
制造技术与机床(2017年3期)2017-06-23
电子制作(2016年15期)2017-01-15
电子设计工程(2015年15期)2015-02-27
