
面向肺癌近距离放疗手术的自动定位实时追踪系统
2018-04-08 02:42陈超民窦怀素杨志永
天津大学学报(自然科学与工程技术版) 2018年4期
姜 杉,陈超民,窦怀素,杨志永
面向肺癌近距离放疗手术的自动定位实时追踪系统
姜 杉,陈超民,窦怀素,杨志永
(天津大学机械工程学院,天津 300350)
为辅助医生完成肺癌近距离放疗粒子植入手术,实现远距离监控下的穿刺用模板自动定位,研发了由机器人定位系统、电磁定位追踪系统和治疗计划系统(TPS)组成的模板自动定位实时追踪系统.针对术中空间配准,提出了四元数(quaternion)-最近点迭代(ICP)混合算法,CT环境下的现场实验结果表明,其配准精度达到(0.87±0.11),mm.模板定位追踪实验结果表明,系统的追踪精度达到(1.01±0.10),mm,满足手术需求.该系统的应用实现了模板的精确快速定位,对降低医生工作强度、减少病人所受辐射与加快肺癌近距离放疗手术进程,有着重要的临床意义.
近距离放疗;模板;自动定位;空间配准;实时追踪
肺癌是我国乃至世界上最常见的呼吸系统恶性肿瘤之一[1-3].近年来,将放射性粒子通过穿刺的方法植入到肿瘤内的近距离治疗手术已成为我国临床肿瘤治疗的热点之一[4-6].中国北方放射性粒子多中心协作组通过大量临床研究,结合治疗计划系统(treatment planning system,TPS)制定的CT联合模板引导125,I放射性粒子植入治疗肺癌的规范化技术流程,在肺癌治疗中取得了令人满意的疗效[7-9].该流程的主要技术路线如下:首先,患者在术前按照手术体位进行CT扫描;其次,将所得医学图像信息以DICOM格式导入TPS,进行术前计划,包括靶区勾画、粒子空间布置、最佳进针路径选择与在进针方向上生成虚拟模板;之后,提取出虚拟模板的位置、角度信息,在患者体表手动安装、调整和固定模板.最后,通过模板上均匀设计的引导针道将插植针一次性插入,完成粒子植入手术.
随着医学图像处理及剂量规划计算等技术的快速发展,理想的术前计划可以在TPS中得以制定[10-11].然而,术前计划能否精准地在临床手术中得以实现,很大程度上取决于穿刺用模板的实际定位精度.目前,在临床肺癌近距离放疗手术中,外科医生在完成术前治疗计划之后,不可避免地要花费大量时间和精力,通过手动方式借助简易的粒子植入定位装置完成模板的安装和调整,以求达到术前计划所确定的理想位置和角度.而且,手动定位的方式精度通常不高(低于3,mm),因此在术中需要对模板的定位通过多次的CT扫描加以确认,才能保证最终的插植针实际进针路径的准确性.
为此,本文从临床实际需求出发,研发了一套面向肺癌近距离放疗手术的模板自动定位实时追踪系统.该系统借助辅助定位机器人、电磁定位追踪技术和TPS,旨在辅助外科医生远程完成穿刺模板的精确、快速定位及对该自动过程的监控,将医生从繁琐的模板定位现场解放出来,降低医生工作强度,减少CT扫描次数,加快穿刺手术的进程,从而提高手术效率.
1 系统整体设计
1.1 系统结构
本文提出的肺癌近距离放疗手术的自动定位追踪系统,由机器人辅助定位系统、电磁定位追踪系统和TPS三部分组成,如图1所示.
作为夹持模板实现自动定位的直接载体,本实验室独立研发了一套机器人辅助定位系统,如图1(a)所示.机械结构上,该机器人采用连床式安装,根据患者体部肿瘤的位置,可选择固定于CT床左侧或右侧,圆弧导轨结构的引入方便了患者进行术中躺位.穿刺用模板则被夹持于机器人的末端执行器上.控制方面,机器人采用基于ARM的嵌入式控制系统,上位机运动控制模块则被集成于TPS中.手术中,医生从TPS的治疗诊断结果中提取出模板的位姿信息后与机器人实时通讯,即可直接驱动机器人完成模板的自动定位.
空间定位是实现模板运动追踪的关键.电磁定位技术凭借其使用方便、价格较低、无追踪盲区、较为理想的精度等优势,已被越来越多地应用于临床手术导航系统中[12-13],本文正是选用电磁定位追踪系统,主要承担两部分功能:将一路电磁接收器固定于探针尾部完成标定后[14]可直接获取患者体表所贴标记点在真实空间中的坐标并储存,用以完成空间配准;将另一路电磁接收器固定于模板上,用以完成对模板位姿的实时追踪.

图1 自动定位实时追踪系统关键组成
治疗计划系统(TPS)(图1(c)所示)由本实验室独立研发,除了含有常规的三维重建、术前计划等模块,更创新性地设计了手术导航模块,包括机器人驱动控制、空间配准与模板的追踪与可视化功能.机器人在自动定位的过程中,将电磁定位系统实时追踪的模板位姿信息通过空间配准映射到TPS中三维重建的虚拟空间,实时刷新虚拟模板在该空间的位姿信息,实现模板定位在TPS窗口中的可视化,使得医生在远离CT室的监控室内对机器人辅助定位这一自动过程进行监测和评估成为可能.本文在TPS中实现了追踪结果的实时图像显示,该可视化模块的软件界面如图2所示.
1.2 手术流程
结合现行的肺癌近距离放疗手术的技术流程,应用本文研发的自动定位实时追踪系统,根据临床需求制定的机器人辅助定位的肺癌近距离放疗手术流程如图3所示.
术前,在患者胸部粘贴6~12枚可以包裹住肺部并且可在CT中呈明亮清晰图像的标记点.患者接受常规CT扫描之后,在TPS中读入所获得的DICOM医学图像进行图像处理,三维重建出虚拟模型空间.在TPS中依次精确地提取出所有标记点在该虚拟空间中的坐标.此外,为保证患者在手术过程中体位不发生变化,将其用真空负压垫固定于CT床.在患者体位固定的情况下,用电磁定位追踪系统的标定探针依次精确获取各个标记点在真实空间中的坐标.将标记点的两组坐标值作为配准算法的输入来自动完成术中空间配准.术中,医生根据DICOM医学图像信息,制定术前治疗计划,由此确定第1根插植针在患者体表的刺入点位置与模板的角度,在TPS中利用机器人驱动控制模块完成该位姿信息向控制指令的转译.机器人与TPS完成通讯后,开启自动定位模式,即带动模板与固定其上的第1根插植针自动到达目标点.在机器人辅助定位的过程中,医生可在TPS可视化窗口中以动态图像的形式实时观测到模板与插植针的运动状态与位姿信息.当机器人到达终了位姿时,身处监控室的医生可直接依据可视化的模板图像对CT室内患者体表上方模板的定位做出精度评估;如果模板的终了位姿与术前计划的预期位姿有偏差,微调机器人进行补偿即可,无需再次进行CT扫描.考虑到可视化图像可能产生的误差,根据模板引导粒子植入的肺癌近距离放疗手术的实际临床需求,结合本文提出的自动定位实时追踪系统自身的精度,本文选定系统精度评估参数如下:终了位姿下,可视化图像中模板上第1根插植针针尖点与术前计划确定的患者体表刺入点位置误差不高于1.5,mm,模板在可视化图像中与术前计划确定的角度偏差不高于0.5°.

图2 TPS可视化模块软件界面

图3 应用自动定位实时追踪系统的肺癌近距离放疗手术流程
从图3的手术流程可以看出,空间配准是实现CT室内机器人辅助定位过程在TPS虚拟图像空间中可视化的关键环节,因此本文在第2节中给予特别研究.
2 空间配准
2.1 配准理论分析
在机器人辅助定位过程中,若要实现对模板的实时追踪与可视化,首先必须要对患者的实际体位与三维重建的虚拟模型进行精确配准,即建立起患者所处的真实空间与TPS中三维虚拟图像空间之间的坐标转换关系,此即空间配准.空间配准是最终实现虚拟模板在TPS中可视化的前提,其精度直接影响到追踪的准确性与可视化的可靠性.


(1)
针对上述数学问题,Horn引入齐次坐标与四元数(quaternion)的理论,用最小二乘法推导出了该问题的求解方法;之后,Besl和Mckay提出了最近点迭代(ICP)算法,该算法配准效果良好,尤其是在点集初值状态理想的情况下,算法能获得很高的精度,然而,如果初值不理想,传统的ICP算法容易因为局部收敛而陷入局部最优解,导致配准精度下降甚至出现严重错误[15-17].
2.2 混合算法QICP的提出
基于第2.1节的分析,针对传统ICP算法对配准点集初值状态要求苛刻的限制,本文提出一种四元数-最近点迭代混合(QICP)算法.该算法的核心思想为先使用四元数算法对初始点集进行一次配准,优化其初值状态,为ICP算法的二次配准避免了点集初值状态不佳的可能,在保证传统ICP算法的配准精度的同时更增大其适用性.QICP算法的具体流程 如下.


(2)

(3)

(4)

(5)
步骤3 当=+1时,重复步骤2,则有

(6)

(7)

(8)
否则,转到步骤5.
3 实验验证
3.1 配准算法仿真实验
为验证QICP混合算法的配准精度和适用性,本文在CT环境下做图4所示的现场实验.将患者假体模型摆放于CT床上,在模型胸部大致均匀地粘贴9枚包裹住肺部的标记点.根据金属在CT下成像比较明显的特点,本实验中选取金属锡作为标记物.选用加拿大NDI公司生产的3D Guidance trakSTAR电磁定位追踪系统完成空间定位,以固定好位置的电磁发射器自身所确定的坐标系作为真实手术空间坐标系.实验流程如下.
步骤1 体表粘有标记点的假体模型接受CT扫描,获取DICOM医学图像.
步骤2 在TPS中读入DICOM图像,在可视化窗口中依次获取标记点(呈像高亮)在虚拟图像空间中的坐标并保存.
步骤3 利用标定后的探针分别获取标记点在真实手术空间的坐标.
步骤4 改变发射器的位置,重复步骤3.
步骤5 数据处理.分别取步骤4中所获取的坐标数据,依次与步骤2中的坐标数据共同作为算法输入,统计本文所提出的混合算法与四元数算法、传统ICP算法的配准结果.

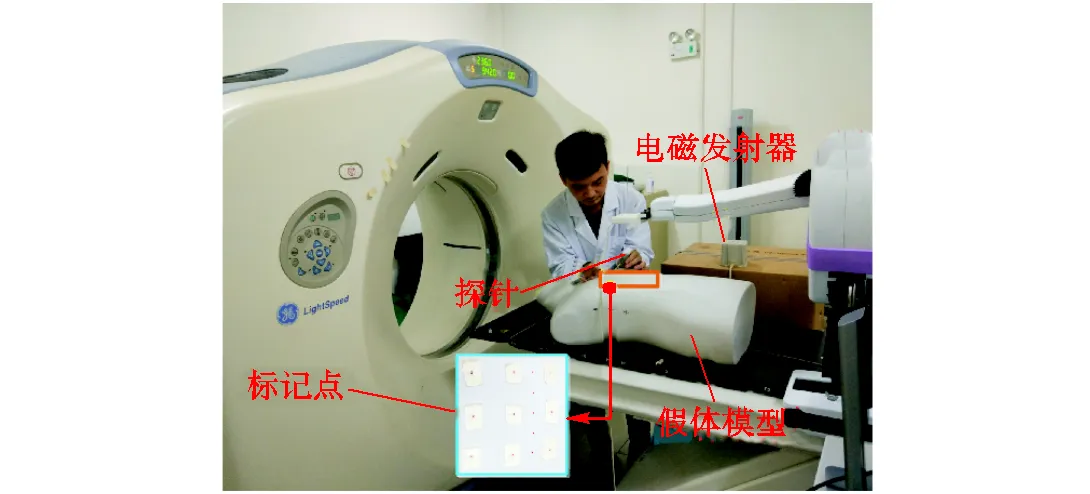
图4 配准算法现场实验
表1 3种空间配准算法的实验结果比较

Tab.1 Comparison of experiment results of three spatial reg-istration algorithms

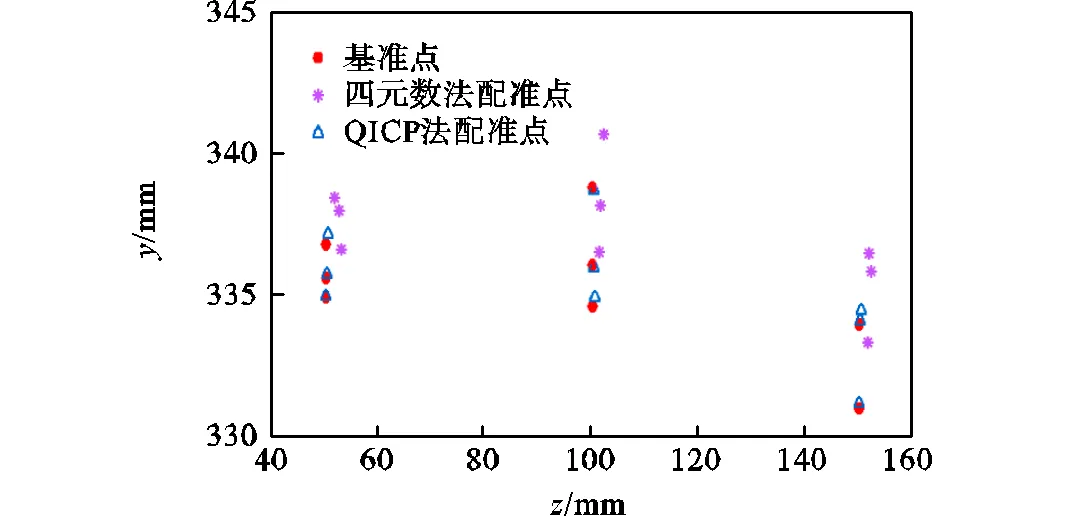
为更直观比较QICP与四元数算法的配准精度,本文将第1组实验的点集进一步提取出来绘制出配准点集图,如图5所示.各个基准点与配准点距离的贴合程度直接反映出相应算法的精度.结果显示,QICP在精度上明显优于四元数算法.
3.2 模板定位追踪实验

结果显示,该系统的实时追踪与可视化误差为1.01±0.10,mm,大幅度提高了现行的肺癌近距离放疗手术的模板定位精度,该系统在精度上被验证符合临床需求.此外,在传统手术过程中,模板手动定位时间通常耗时40,min左右,这直接导致近距离放疗手术时间偏长.本次实验中,在医生的远程监控下模板自动定位过程(包括术前空间配准过程)平均用时仅为15,min.而且,借助于TPS可视化窗口,模板定位过程中只进行了一次常规CT扫描,本系统的应用在一定程度上减少了医生对CT的依赖.

(a)平面
(b)平面
(c)y-z平面

图6 模板定位追踪实验现场

(a)真实位姿信息提取 (b)模板可视化
表2 模板追踪与可视化实验结果

Tab.2 Results of template tracking and visualization ex-periments
3.3 实验讨论
在肺癌近距离放疗手术中,呼吸运动会对穿刺精度造成影响,但目前在近距离放疗领域并没有出现完善的解决方案,外放疗的呼吸追踪方法[18-19]无法应用到近距离放疗领域.在临床中,术前通过负压真空垫固定患者体位以减小患者运动和呼吸运动带来的影响,术中首先植入一根定位针来限制肿瘤的运动,该方法在一定程度上减弱了患者运动、呼吸运动、组织变形等因素带来的干扰.本文以假体模型作为实验载体,所做实验均未考虑呼吸运动、组织变形等影响,需要在该方面进行更深一步的后续研究和实验.
4 结 语
本文针对临床实际,研发了一套面向肺癌近距离放疗手术的自动定位实时追踪系统.介绍了该系统的软硬件组成,制定了机器人辅助定位的手术流程.实验部分首先对提出的混合空间配准算法做出了验证,然后在临床环境下对系统性能做了评估实验.实验结果表明系统在定位追踪精度上满足临床需求,该系统的应用对降低医生工作强度、减少病人所受辐射与加快肺癌近距离放疗手术进程,有着重要的临床意义.
[1] Siegel R L,Miller K D,Jemal A. Cancer statistics[J].:,2016,66(1):7-30.
[2] Tsao A S,Scagliotti G V,Bunn P A Jr,et al. Scientific advances in lung cancer[J].,2016,11(5):613-638.
[3] Chen W,Zheng R,Baade P D,et al. Cancer statistics in China[J].:,2016,66(2):115-132.
[4] Stewart A,Parashar B,Patel M,et al. American Brachytherapy Society consensus guidelines for thoracic brachytherapy for lung cancer[J].,2015,15(1):1-11.
[5] Imamura F,Ueno K,Kusunoki Y,et al. High-dose-rate brachytherapy for small-sized peripherally located lung cancer[J].,2006,182(12):703-707.
[6] Li W,Guan J,Yang L,et al. Iodine-125 brachytherapy improved overall survival of patients with inoperable stage Ⅲ/Ⅳ non-small cell lung cancerversus the conventional radiotherapy[J].,2015,32(1):395.
[7] 霍 彬,王 磊,王海涛,等. 模板联合肋骨钻孔技术辅助放射性粒子植入治疗肺癌的可行性[J]. 山东大学学报:医学版,2017,55(2):26-31.
Huo Bin,Wang Lei,Wang Haitao,et al. Feasibility of radioactive seed implantation in the treatment of lung cancer assisted by template combined with rib drilling technique[J].:,2017,55(2):26-31(in Chinese).
[8] 韩明勇,霍 彬,张 颖,等. CT联合模板引导放射性粒子植入治疗肺癌技术流程[J]. 山东大学学报:医学版,2017,55(2):14-20.
Han Mingyong,Huo Bin,Zhang Ying,et al. Technique procedure of template combined with CT-guided radioactive seeds implantation for lung cancer[J].:,2017,55(2):14-20(in Chinese).
[9] 霍 彬,侯朝华,叶剑飞,等. CT引导术中实时计划对胸部肿瘤125I粒子植入治疗的价值[J]. 中华放射肿瘤学杂志,2013,22(5):400-403.
Huo Bin,Hou Zhaohua,Ye Jianfei,et al. The study of intraoperative real-time planning by CT-guided in125I seed implantation for thoracic malignance[J].,2013,22(5):400-403(in Chinese).
[10] Dempsey C. Erratum to:Methodology for commissioning a brachytherapy treatment planning system in the era of 3D planning[J].,2010,33(4):373.
[11] Min B J,Nam H,Jeong I S,et al. A simple DVH generation technique for various radiotherapy treatment planning systems for an independent information system [J].,2015,67(1):254-259.
[12] Racine E,Hautvast G,Binnekamp D,et al. Real-time electromagnetic seed drop detection for permanent implants brachytherapy:Technology overview and performance assessment[J].,2016,43(12):6217-6225.
[13] de Lambert A,Esneault S,Lucas A,et al. Electromagnetic tracking for registration and navigation in endovascular aneurysm repair:A phantom study[J].,2012,43:684-689.
[14] 陈艳梅,杨志永,姜 杉. 机器人辅助手术导航系统的注册技术[J]. 计算机辅助设计与图形学学报,2015,27(5):953-960.
Chen Yanmei,Yang Zhiyong,Jiang Shan. Registration technique of robot-aided image guided surgery[J].,2015,27(5):953-960(in Chinese).
[15] 白 晶,丁 辉,王广志,等. 手术导航中人体标志点注册方法和注册精度研究[J]. 生物医学工程学杂志,2008,25(6):1242-1248.
Bai Jing,Ding Hui,Wang Guangzhi,et al. A study on the registration method and precision in image guided surgery[J].,2008,25(6):1242-1248(in Chinese).
[16] Wang H K. An improved method based on quaternion and planar segmentation fit in 3D registration[C]//()London,UK,2012:717-723.
[17] Besl P J,Eric L. A method for registration of 3-D shapes[J].,2012,14(2):239-256.
[18] Schweikard A,Shiomi H,Adler J. Respiration tracking in radiosurgery[J].,2004,31(10):2738-2741.
[19] Maier-Hein L,Tekbas A,Seitel A,et al. In vivo accuracy assessment of a needle-based navigation system for CT-guided radio frequency ablation of the liver[J].,2008,35(12):5385-5396.
(责任编辑:金顺爱)
Automatic Positioning and Real-Time Tracking System for Lung Cancer Brachytherapy
Jiang Shan,Chen Chaomin,Dou Huaisu,Yang Zhiyong
(School of Mechanical Engineering,Tianjin University,Tianjin 300350,China)
To assist the surgeons in lung cancer brachytherapy,an automatic positioning and real-time tracking system consisting of robotic positioning system,electromagnetic-positioning and tracking system and treatment planning system(TPS)was developed to achieve the automatic template positioning under remote monitoring.To cope with the issue of spatial registration,a quaternion-based iterative closest point(QICP)algorithm was proposed.Results of field experiment in a CT room show that the proposed QICP algorithm achieves a registration accuracy of (0.87±0.11),mm.It is also validated by the tracking experiments that the proposed system achieves a tracking accuracy of (1.01±0.10),mm,which meets the clinical requirements.The application of the system accomplishes precise and quick positioning of the template,which is of great significance in lessening the workload of surgeons,reducing the CT radiation injury to the patient and accelerating the progress of a lung brachytherapy surgery.
brachytherapy;template;automatic positioning;spatial registration;real-time tracking
10.11784/tdxbz201706028
TP24;TP391
A
0493-2137(2018)04-0373-07
2017-06-12;
2017-08-20.
姜 杉(1973— ),女,教授,shanjmri@tju.edu.cn.Email:m_bigm@tju.edu.cn
陈超民,cm_c@tju.edu.cn.
国家自然科学基金重点项目(51775368);天津市科技重大专项项目(14ZCDZGX00490);广东省省级科技计划项目 (2017B020210004).
the National Natural Science Foundation of China(No.,51775368),the Key Technology and Development Program of the Tianjin Municipal Science and Technology Commission(No.,14ZCDZGX00490)and the Technology Planning Project of Guangdong Province,China(No.,2017B020210004).
猜你喜欢
建材发展导向(2022年23期)2022-12-22
建材发展导向(2022年20期)2022-11-03
世界科学技术-中医药现代化(2022年3期)2022-08-22
建材发展导向(2022年12期)2022-08-19
师道·教研(2022年1期)2022-03-12
一重技术(2021年5期)2022-01-18
海洋信息技术与应用(2020年1期)2020-06-11
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
传媒评论(2019年4期)2019-07-13
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
