空地导弹复合制导模式设计及仿真技术研究
2018-04-09 07:45杨凯卢莺
航空兵器 2018年1期
关键词:信息融合
杨凯 卢莺


摘 要: 本文介绍了典型多模复合制导空地导弹的制导模式设计, 对复合导引头的结构组成、 工作原理、 制导信息融合技术、 制导信息过渡衔接切换技术、 制导信息智能补偿技术作了阐述。 最后, 阐述了双模复合制导半实物仿真系统设计方案及典型双模复合制导半实物仿真系统组成原理及工作方式。
关键词: 多模复合制导; 信息融合; 导引头; 仿真系统
中图分类号: TJ765.3 文献标识码: A 文章编号: 1673-5048(2018)01-0020-07
0 引 言
随着现代社会智能化、 网络化、 信息化技术的发展, 光电干扰技术、 隐身技术和反辐射导弹技术在军事上得到应用, 单一制导体制的武器装备受到日益严重的电子战挑战, 其固有弱点和局限性大大降低了制导武器系统的作战效能, 甚至难以适应未来复杂、 恶劣的战场环境, 这就促使武器制导体制由单模导引向多模导引发展。 多模复合制导方式成为必然选择, 其优势在于, 可充分发挥各频段或各制导体制的特长, 相互弥补, 极大地提高武器系统的抗干扰能力和作战效能, 已经成为精确制导武器实现全自动化和智能化的主要技术途径, 引起了各国的广泛重视。
目前国外正在研制采用毫米波/激光半主动、 毫米波/红外成像、 毫米波/激光半主动/红外成像等多模复合制导体制的空地导弹。 最典型的多模复合制导空地导弹有英国研制的“双模硫磺石”(DMB)导弹, 其采用毫米波/激光半主动双模制导体制, 以及美国研制的联合空地导弹(JAGM), 其采用毫米波/激光半主动/红外成像三模制导体制。
1 多模复合制导空地导弹制导模式设计
多模复合制导空地导弹能够适应全地域、 全天时、 复杂气象及电磁环境条件下的作战使用要求, 武器系统采用火控雷达、 昼夜观瞄系统、 综合通讯系统进行目标定位, 由载机在敌低空火力区域外发射空地导弹, 精确攻击防空单元、 主战坦克、 野战指挥车等高价值目标, 还可用于攻击其他重要技术兵器, 如步兵战车、 装甲运兵车和小型舰船等地(水)面目标。 采用多模复合制导的空地导弹普遍具有以下特点: (1)远距离攻击能力; (2)精确制导能力; (3)发射后不管能力; (4)全天候攻击能力; (5)多目标攻击能力。
对于毫米波/激光半主动/红外成像三模制导的空地导弹, 主要设计如下五种制导模式:
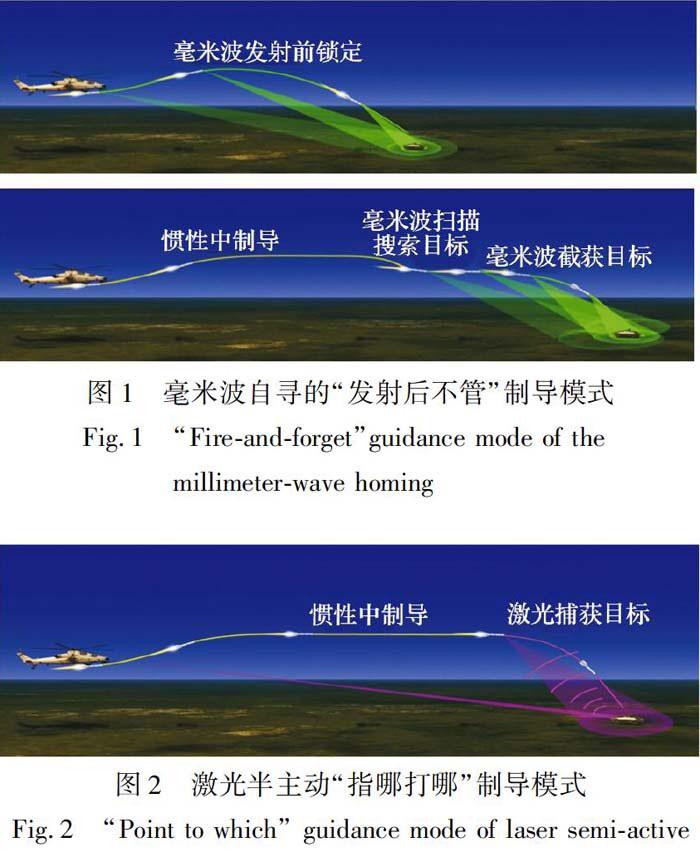
(1) 毫米波自寻的“发射后不管”制导模式, 见图1。
导引头毫米波模式工作, 自主截获和跟踪目标, 载机发射导弹后即可撤离, 可完全实现“发射后不管”。
(2) 激光半主动“指哪打哪”制导模式,见图2。 使用本机或非本机激光指示目标, 导引头激光半主动模式工作, 利用激光模式“指哪打哪”的特点, 实现对多种地面目标的精确打击。
(3) 激光毫米波“复合接力”制导模式, 如图3所示。
首先使用导引头激光半主动模式, 为导引头毫米波模式提供初始指向, 提升目标捕获与识别概率, 当导引头毫米波模式捕获目标后, 使用毫米波信息进行末制导, 实现激光毫米波“复合接力”制导模式。
(4) 红外成像自寻的“发射后不管”制导模式, 如图4所示。
使用导引头红外成像模式, 攻击近距离静止或运动目标, 可采用“发射前锁定”攻击方式, 实现“发射后不管”; 攻击远距离较简单背景下的特定固定目标时, 可采用“发射后锁定”攻击方式, 也可实现“发射后不管”。
(5) 激光与红外成像“復合接力”制导模式, 如图5所示。 首先使用导引头激光半主动模式, 将导引头光轴引导到待攻击目标点附近, 再进入红外图像可探测距离内, 转入红外图像模式制导, 实现激光与红外成像“复合接力”制导模式。
2 毫米波/激光半主动/红外成像三模导引头方案设计
毫米波/激光半主动/红外成像三模复合导引头各分系统采用共用稳定平台位标器系统的共口面复合方案, 导引头由以下部分组成: (1) 主动毫米波探测系统; (2) 四象限激光探测系统; (3) 凝视红外焦平面成像探测系统; (4) 稳定平台位标器及控制系统; (5) 信息融合处理器; (6) 多波段头罩。 导引头结构及系统组成见图6~7。
毫米波分系统采用平板阵列单脉冲天线、 毫米波收发模块、 频率源、 信号源、 双通道中频接收机和信号处理器; 激光探测系统与激光照射器协调工作, 采用四象限激光探测器, 接收和识别约定码型的激光回波信号, 可稳定跟踪目标; 红外探测系统采用制冷凝视红外焦平面成像, 提高对地目标的探测距离与识别能力。
激光半主动/红外成像探测系统采用共光路设计, 红外探测系统与激光探测系统共用一个通道, 通过分光板将红外与激光信号在通道后端分开, 分别送入相应探测器进行后续处理。
位标器采用速率陀螺稳定平台技术方案, 毫米波探测器、 红外探测器和激光探测器安装在同一个位标器上, 且光轴、 电轴、 机械轴重合。
复合导引头信息处理硬件平台接收不同波段传感器的输出信息, 按照基于特征层的决策层信息融合策略, 开展多传感器信息处理及融合, 确定目标相对导引头的角偏差信息, 将控制指令输出到导引头控制回路, 经放大转换后, 作用在导引头平台框架力矩器, 力矩器输出力矩驱动外框及内框, 平台实现两个方向的运动, 从而完成对目标的实时跟踪。
3 毫米波/激光半主动/红外成像三模导引头工作原理及信息融合处理方法
使用三模导引头对目标进行探测、 识别和跟踪, 主要目的在于多种传感器进行互补以便得到更多的目标信息。 三模复合制导的空地导弹采用比例导引规律进行末制导, 因此, 本文主要从制导控制大系统角度针对导引头测量得到的弹目距离、 弹目视线角速度等信息进行信息融合算法设计, 而不是针对目标本身特征信息(如目标成像特性、 目标起伏噪声等)进行相关信息融合算法设计。 同时, 结合相关工程应用介绍了不同制导信号之间的过渡衔接技术、 制导信息智能补偿技术。
3.1 制导信息融合技术
复合制导信息融合技术是指利用计算机技术, 对复合导引头工作在不同制导模式下按时间顺序观测得到的目标信息, 在一定的准则下加以自动分析、 综合, 从而形成决策级融合制导信息的先进技术。 信息融合有数据层融合、 特征级融合和决策级融合三类。 复合导引头制导信息融合采用基于特征层的信息融合策略。 信息融合的一般步骤分: (1) 数据预处理, 包括空间对准、 时间对准、 野值处理等; (2) 数据关联, 采用的算法包括最近邻域算法、 K邻域算法、 加权统计距离检验法、 概率数据关联算法、 基于灰色关联的概率数据关联算法等; (3) 信息融合, 采用的算法包括Bayes推理法、 表决法、 D-S推理法、 神经网络融合法等。
信息融合一般分为集中式信息融合和分布式信息融合。 集中式处理能够得到最优的处理结果, 但是对数据预处理的要求较高, 分布式处理较为灵活。
3.1.1 集中式信息融合方案
设三模导引头中, 激光制导模式输出信息为X1(k1, …, kn), 红外制导模式输出信息为X2(k1, …, kn), 毫米波制导模式输出信息为X3(k1, …, kn), 采取集中式信息融合的結构如图8所示。
3.1.2 分布式信息融合方案
设三模导引头中, 激光制导模式输出信息为X1(k1, …, kn), 红外制导模式输出信息为X2(k1, …, kn), 毫米波制导模式输出信息为X3(k1, …, kn), 采取分布式信息融合的结构如图9所示。
3.2 制导信息过渡衔接切换技术
以激光毫米波“复合接力”制导模式为例, 说明多模复合制导接力及制导信息过渡衔接切换技
术, 导引头接收制导控制计算机“解锁”指令, 导引头解锁并按给定扫描规律首先进行激光回波搜索, 捕获并跟踪激光回波信号, 此时导引头由激光回路控制跟踪目标。 毫米波雷达随“解锁”指令开机, 探测雷达回波信号, 捕获目标回波信息后, 导引头进行目标确认并根据切换条件判断是否切换跟踪状态; 满足条件后切换为毫米波跟踪, 此时导引头由毫米波回路控制跟踪目标。 制导信息由激光制导信息过渡衔接到毫米波制导信息, 切换到毫米波雷达跟踪后, 若出现目标丢失, 不再切换回激光搜索目标, 导引头按制导控制计算机给定扫描规律利用毫米波雷达重新搜索目标, 如果不能再次截获目标, 则制导信息切换为理论视线角速度信息。 空地导弹末制导段制导信息过渡衔接、 切换以及智能补偿传递流程如图10所示。
理论视线角速度信号计算方法如下:
3.3 制导信息智能补偿技术
导弹在末制导段飞行过程中, 由于目标姿态突然变化、 目标闪烁以及其他诸多因素的干扰, 都可能引起导引头输出不稳定, 经制导信息融合后, 仍可能出现导引头输出信息跟踪目标时出现短暂丢失或频繁丢失等不稳定跟踪现象。 当导引头稳定跟踪目标时, 设截获状态位D0为1, 导引头输出视线角速度稳定; 当导引头丢失目标时, 设截获状态位D0为0, 导引头输出视线角速度为0。 导引头截获状态位D0与导引头输出视线角速度的关系曲线见图13。 如果制导控制系统采用此视线角速度信号对导弹进行末段比例导引控制, 将会导致导弹飞行姿态摆动, 进而影响命中精度。 在此可能引起导引头输出不稳定, 经制导信息融合后,仍可能出现导引头输出信息跟踪目标时出现短暂丢失或频繁丢失等不稳定跟踪现象。 当导引头稳定跟踪目标时, 设截获状态位D0为1, 导引头输出视线角速度稳定; 当导引头丢失目标时, 设截获状态位D0为0, 导引头输出视线角速度为0。 导引头截获状态位D0与导引头输出视线角速度的关系曲线如图13所示。 如果制导控制系统采用此视线角速度信号对导弹进行末段比例导引控制, 将会导致导弹飞行姿态摆动, 进而影响命中精度。 在此导引头输出的视线角速度信号作用下, 导弹的飞行姿态曲线如图14所示。
为了解决导引头跟踪目标不稳定时输出视线角速度信号跳零, 导致导弹姿态摆动、 命中精度降低的问题, 制导控制系统采用导引头输出视线角速度信号智能补偿技术, 对导引头输出视线角速度信号进行处理, 处理结果如图15所示。 采用智
能补偿技术处理后的视线角速度平滑, 接近真实视线角速度输出。 通过智能补偿技术处理后的视线角速度信号进行末段比例导引控制, 姿态角摆动现象明显得到抑制, 且能够保证导弹命中精度。 姿态角仿真结果如图16所示。
4 多模复合制导系统仿真技术
4.1 双模复合制导半实物仿真方案研究与设计
为验证双模复合制导控制系统的方案设计, 需要进行半实物仿真验证。 双模复合制导半实物仿真系统设计主要包括系统建模与验模、 软件设计、 系统连接和环境支持仿真技术、 半实物仿真试验方案设计等。
搭建双模复合制导半实物仿真系统首先需要建立系统仿真模型并检验其正确性。 双模复合制导控制系统半实物仿真建模主要包括弹体空间六自由度数学模型、 导弹-目标相对运动学模型、 制导控制部件模型、 自动驾驶仪数学模型、 干扰噪声模型和系统误差模型等。
仿真系統软件设计包括模型程序设计、 服务程序设计和系统集成程序设计。 通过对弹体飞行运动学、 动力学特性的分析, 按照“构件”组装原理, 依据通用、 可剪裁拆装的要求进行模块化设计, 并通过对控制系统结构、 组成和传递函数的分析, 按设备组成单元对模型程序进行模块化设计。 设计支持仿真系统构成的功能软件模块, 包括原始数据处理模块、 I/O连接模块、 剪裁控制模块等; 设计支持仿真系统运行监控的功能软件模块, 包括交互控制模块、 结果数据处理模块、 参数显示模块、 数据辨识和分析模块、 运行监测模块等; 各种算法程序的设计, 包括数值积分算法程序、 数据处理算法程序, 函数生成算法程序等。 系统集成程序的功能是按照系统组成原理的要求, 将系统“构件”组装成可以控制、 可以测试、 可以运行的仿真试验系统。
半实物仿真试验系统由参试部件、 仿真模型、 仿真设备及各种接口装置等组成。 其中仿真设备包括仿真计算机, 角运动仿真设备, 各种单轴、 三轴转台, 角速度仿真设备, 各种加速率转台, 线加速度仿真设备以及伺服机构负载仿真设备等。 各种接口装置为A/D, D/A, D/D, TTL接口及专用接口等。
针对双模复合制导半实物仿真试验, 需要研究制定相应的试验方案, 主要包括数字仿真试验方案、 半实物仿真试验方案、 程控仿真试验方案、 闭环仿真试验方案等。 试验方案的设计依据有: 考核制导控制系统设计的正确性; 考核弹载计算机实现数学模型的正确性; 考核各制导控制部件工作的协调性、 可靠性及接口的匹配性; 考核命中精度、 抗干扰能力、 边界条件、 载机发射条件等技术指标。 同时, 半实物仿真系统的设计方案要涵盖双模复合制导系统的各种工作模式, 为双模复合导引头提供不同的目标模拟系统。
4.2 典型双模复合制导半实物仿真系统
某空地导弹采用激光/毫米波复合导引头寻的制导, 具有“发射前锁定”和“发射后锁定”攻击方式。 (1)发射前锁定攻击: 导弹上电自检正常后, 地面照射器启动激光照射, 射手置“发射前锁定”, 导引头解锁扫描, 当捕获到激光回波后, 转入跟踪状态, 系统提示“锁定好”, 射手按下发射按钮, 导弹发射离轨, 导引头继续跟踪激光信号, 到达预定时刻, 导引头转入毫米波跟踪, 导弹按照比例导引弹道飞行, 直至命中目标。 (2)发射后锁定攻击: 导弹上电自检正常后, 射手按下发射按钮, 导弹发射离轨, 地面照射器按照时序启动激光照射, 导弹按照预定中制导控制程序飞行, 导引头按照预定时序解锁、 扫描, 当捕获到目标的激光回波后, 转入跟踪状态, 到达预定时刻, 导引头转入毫米波跟踪, 导弹按照比例导引弹道飞行, 直至命中目标。 复合制导半实物仿真系统框图如图17~18所示。
5 结 论
为了解决单一制导体制的局限性, 目前各国正在纷纷研制采用多模导引头的复合制导体制。 本文介绍的五种复合制导模式, 利用各制导模式的优点, 取长补短, 充分发挥武器系统的最优性能。 复合制导信息融合可采用集中式信息融合和分布式信息融合方案, 集中式信息融合能够得到最优的处理结果, 但是对数据预处理的要求较高, 分布式信息融合较为灵活。 文中还提出了制导信息过渡衔接切换技术、 制导信息智能补偿技术, 这两种技术方案应用于多模导引头制导信息过渡衔接切换、 数据异常或融合信息难以满足制导精度需求时, 对比例导引段控制系统有良好的改善作用, 姿态异常摆动现象得到抑制, 控制品质明显提升。
参考文献:
[1] 王军, 谷良贤, 王博, 等.毫米波制导导弹系统误差及捕获概率研究[J].航空计算技术, 2012, 42(5): 25-27.
Wang Jun,Gu Liangxian,Wang Bo,et al. Research on System Error Analysis and Acquisition Probability of MMW Guide Weapon[J].Aeronautical Computing Technique,2012, 42(5): 25-27.(in Chinese)
[2] 马菲, 马清华, 杨凯, 等.毫米波导引头预定回路改进单神经元控制[J]. 弹箭与制导学报, 2015,35(1): 41-44.
Ma Fei,Ma Qinghua,Yang Kai,et al. Improved Single Neural Control for the Predefined Circuit of the MMW Seeker[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2015, 35(1): 41-44.(in Chinese)
[3] 刘源. 基于模糊信息处理的数据融合方法研究[D].西安: 西安电子科技大学,1999.
Liu Yuan. Study of Data Fusion Methods Based on Fuzzy Information Processing[D]. Xian: Xidian University,1999.(in Chinese)
[4] 江源源. 多模复合制导信息融合技术研究[D].哈尔滨: 哈尔滨工程大学, 2007.
Jiang Yuanyuan. Research on the Information Fusion Technology of Multi-Mode Guidance[D]. Harbin: Harbin Engineering University, 2007.(in Chinese)
[5] 何益民, 周军.红外/毫米波双模制导数据融合方法[J].弹箭与制导学报, 2008, 28(1): 75-78.
He Yimin,Zhou Jun. Methods of Data Fusion Based on IR/MMW Dual-Model Combined Guidance[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2008, 28(1): 75-78.(in Chinese)
[6] 穆紅.防空导弹雷达导引头设计[M].北京: 宇航出版社, 1996.
Mu Hong. Design of Anti Air Missiles Radar Seeker[M]. Beijing: Aerospace Press, 1996.(in Chinese)
[7] 沈远香, 黄晓霞, 王永惠.国外多模复合制导技术[J].四川兵工学报, 2013, 34(10): 29-31.
Shen Yuanxiang, Huang Xiaoxia, Wang Yonghui. The Foreign Multimode Compound Guidance Technology[J].Sichuan Ordnance Journal, 2013, 34(10): 29-31.(in Chinese)
[8] 钱杏芳, 林瑞雄, 赵亚男.导弹飞行动力学[M].北京: 北京理工大学出版社, 2012.
Qian Xingfang,Lin Ruixiong,Zhao Yanan. Missile Flight Mechanics[M].Beijing: Beijing Institute of Technology Press, 2012. (in Chinese)
[9] 刘兴堂.精确制导、 控制与仿真技术[M].北京: 国防工业出版社, 2006.
Liu Xingtang. Precision Guide & Control and Simulation Technology[M].Beijing: National Defense Industry Press, 2006. (in Chinese)
[10] 张宏.增强型比例导引的理论与工程应用研究[D].北京: 北京理工大学, 2007.
Zhang Hong. Study on Theory and Engineering Application of Augmented Proportional Navigation System[D]. Beijing: Beijing Institute of Technology, 2007. (in Chinese)
[11] 孙未蒙, 郑志强.多约束条件下对地攻击的最优制导律[J].兵工学报, 2008, 29(5): 567-571.
Sun Weimeng,Zheng Zhiqiang. Optimal Guidance Law with Multiple Constraints in Ground Strike[J]. Acta Armamentarii, 2008, 29(5): 567-571.(in Chinese)
[12] 夏群力, 祁载康, 王磊.闪烁输入下比例导引系统无量纲化研究[J]. 系统仿真学报, 2007, 19(9): 2015-2017.
Xia Qunli,Qi Zaikang,Wang Lei. Non-Dimensional-Normalization of PN System with Glint Input[J].Journal of System Simulation, 2007, 19(9): 2015-2017.(in Chinese)
[13] Moon J, Kim K, Kim Y. Design of Missile Guidance Law via Variable Structure Control[J].Journal of Guidance, Control, and Dynamics, 2001, 24(4): 659-664.
[14] Garnell P. Guided Weapon Control System[M].Second Revision by Qi Zaikang, Xia Qunli. Beijing: Beijing Institute of Technology Press, 2004: 220-245.
猜你喜欢
现代电子技术(2017年3期)2017-03-04
科技资讯(2016年28期)2017-02-28
计算机应用(2016年12期)2017-01-13
中国新通信(2016年21期)2017-01-06
现代电子技术(2016年22期)2016-12-26
亚太教育(2016年35期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
湖南大学学报·自然科学版(2015年8期)2015-09-06
物联网技术(2015年5期)2015-07-18
湖南大学学报·自然科学版(2015年2期)2015-04-20